Norbert Heinz
Norbert Heinz-
First live transmission
05/23/2017 at 15:08 • 0 commentsI have connected a stepper motor, four LEDs and a USB camera to my Raspberry Pi Zero WLAN (the cable for the Pi camera module hasn't arrived yet).
Next thing was doing coding in html, Java script, Perl and C to get a basic user interface. The result is an IoT device that is not mobile yet:
![]()
You can have a look at the arrangement on my control page:
http://homofaciens.de/robospatium-controlstation-EE1_en.htm
You can turn the stepper motor clockwise or counterclockwiese and turn the LEDs ON or OFF. The live view is transmitted by still images that are refreshed each 10s (more or less). Some feedback would be nice if it works with your Browser and your OS - thanks!
The arrangement is placed in my RoboSpatium, thus you can also inspect that basic IoT device with my Lander camera:
http://homofaciens.de/robospatium-controlstation-lander_en.htm
or my rover number 1:
http://homofaciens.de/robospatium-controlstation-rover_en.htm
-
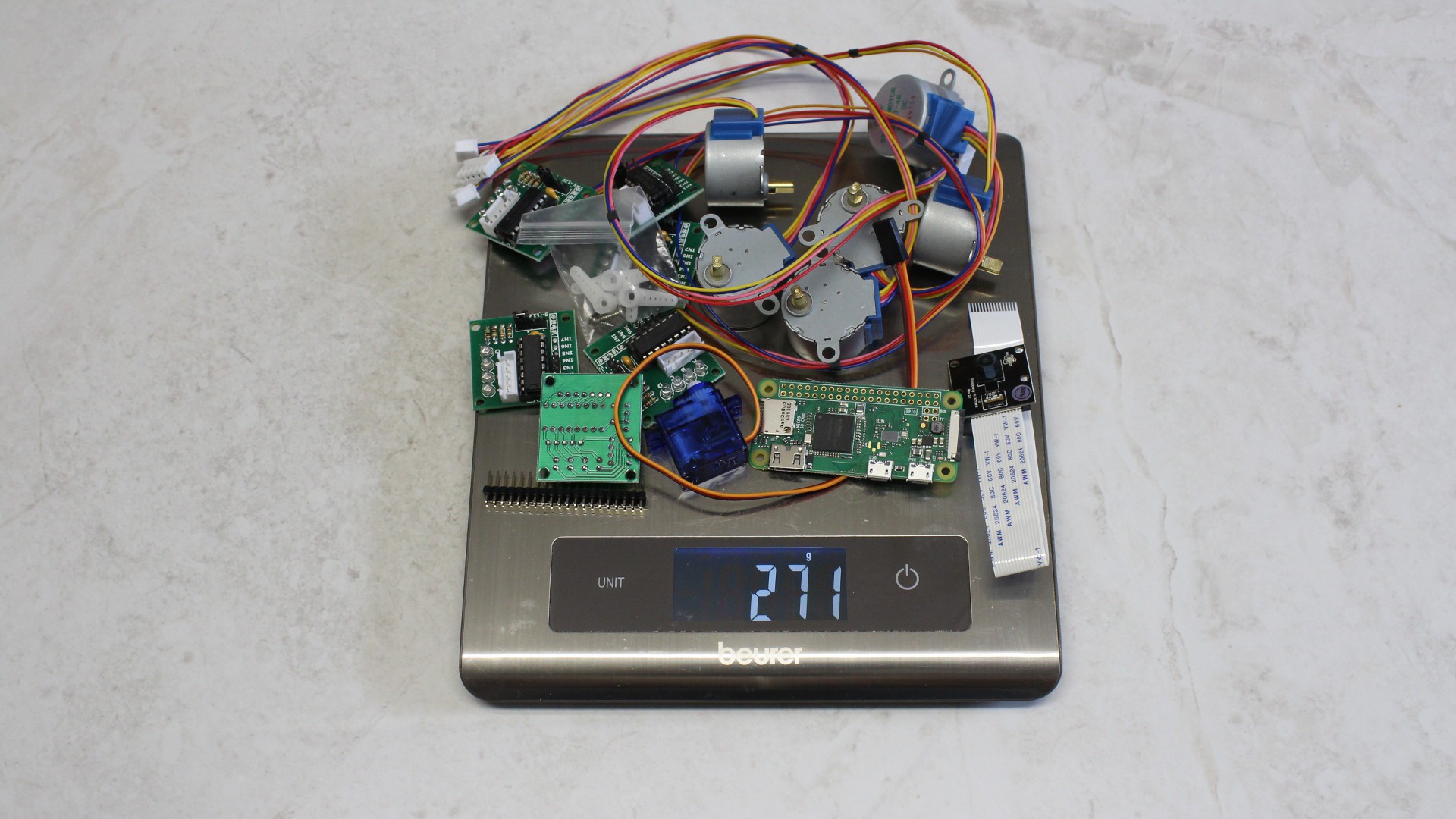
271g
04/25/2017 at 11:17 • 0 commentsI have purchased the base components needed to build my tiny world explorer robot:
1 Raspberry Pi Zero WLAN
6 Stepper motors 28BYJ-48 + control boards
1 Micro servo
1 Rasperry Pi IR camera module
The total weight is:
![]()
The target weight for the robot must be below 500g to keep the shipping costs low. No more than 200g are left for:
LEDs + chassis + wheels + battery holder.
The robot will ship without batteries. 4 or 5 AA cells will be needed to power the electronics.
Next things to be done are:
-Wiring it up and see if it runs
-3D print chassis and wheels
-Adapt the software of my Curiosity Pi to make it run.
Earth Explorer in a small parcel
Send a camera equipped robot in a small parcel to mission targets around planet earth