Norbert Heinz
Norbert Heinz-
Rover R12 cut from aluminium with my CNC
01/19/2019 at 07:16 • 0 commentsR12 is my latest robot. It's cut from 3mm aluminium sheets with my CNC v3.2.2 (see my 2018 HackadayPrice entry):
The central brain of my rover is a SIMATIC IOT2020, two servos for continuous rotation drive the vehicle, a normal servo tilts the IP camera, four LEDs are used as headlights and a flashlight on top prevents (hopefully) that the vehicle is overseen when driving on the floors of maker fairs.
It's a very sturdy design.
-
The construction video of R7
11/07/2017 at 13:59 • 0 commentsThe video about how I converted another RC toy car into a camera equipped rover is online:
More details are on my pages:
http://homofaciens.de/technics-robots-R7-construction_en.htm
The weight of the the rover including 4 AA NiMH batteries is 500g:
![]()
The weight is not below the 500g limit which would grant the cheapest option for shipping, however it's clearly below 1kg which is my second option. There are several grams left for packing, a charger and add-ons.
Coming test drives will be used to optimize the software:
-
I shrinked the rover
10/16/2017 at 20:11 • 0 commentsHackaday price 2017 comes to an end, so its time for a summary.
When I first started building a prototype for a world tour robot, the result was a 34x48x23cm "monster" bot named "R5" with a mass of 3300g. During the months of this year's Hackaday price, my personal challenge was to lower weight and dimensions of this rover. The first approach was building a robot from scratch as I did with R5, but I quickly found that cheap RC model cars are a great option to get a robot up and running quickly. The latest model named "R7" is 440g including 4AA NiMH batteries and an USB charger. With saving money and mostly time in creating a bot I can now think of sending multiple ambassadors to all continents (if people are interested).
![]()
...and if mankind gets interested in this relay race around the globe, a larger RC car with offroad capabilities similar to that of "R5" is on it's way to Germany and will be converted next. At least one cheap rover is prepared to conquer Earth in 2018 (I'll take the costs). Whether more or larger ones will follow, depends on the amount of money I can acquire for this project...
-
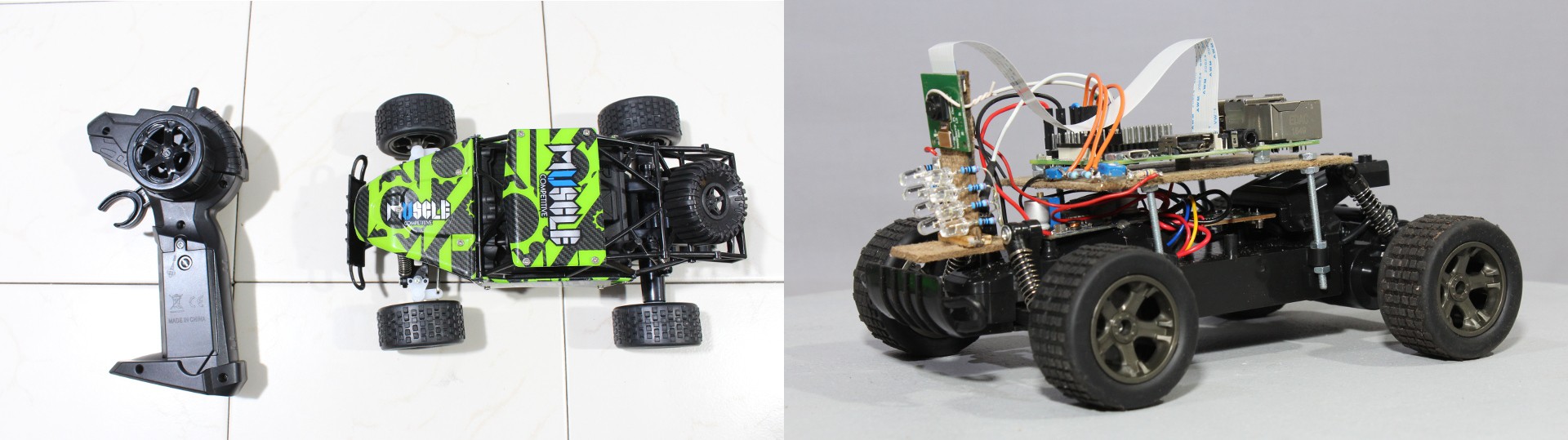
Making a cheap rover
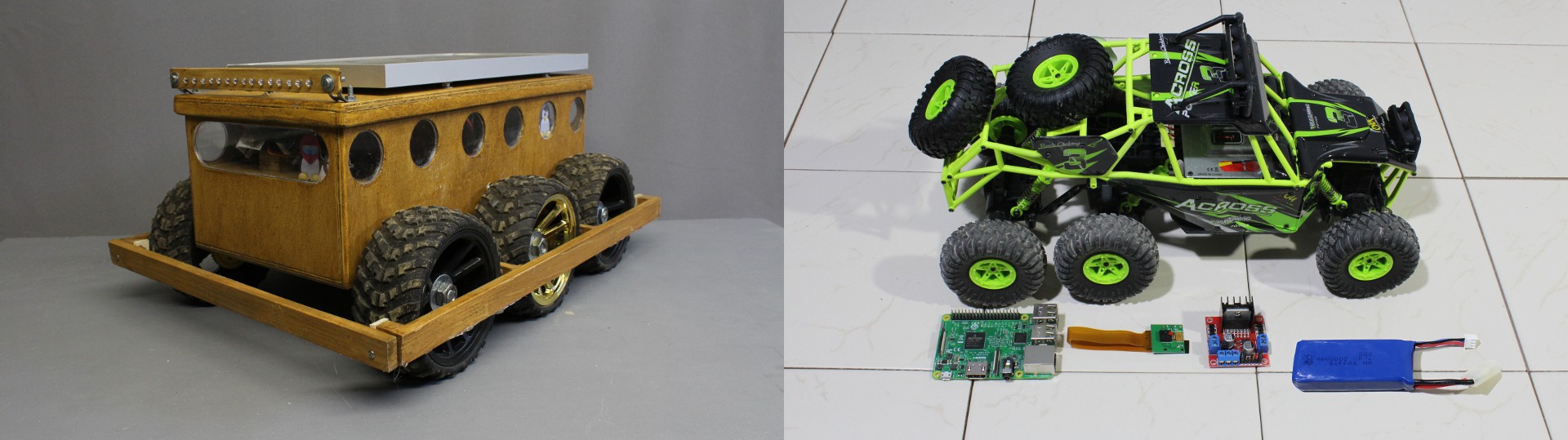
10/15/2017 at 10:59 • 0 commentsI got another cheap RC model car that I am currently converting into a rover:
![]()
The RC car costs less than 20,-€ including shipping and it's hard to get a chassis with wheels, motors, batteries with charger and power electronics cheaper when buying single parts and build it all from scratch. With a Raspberry Pi zero WLAN and a camera module, this would be a base for a world tour robot for less than 50,-€.
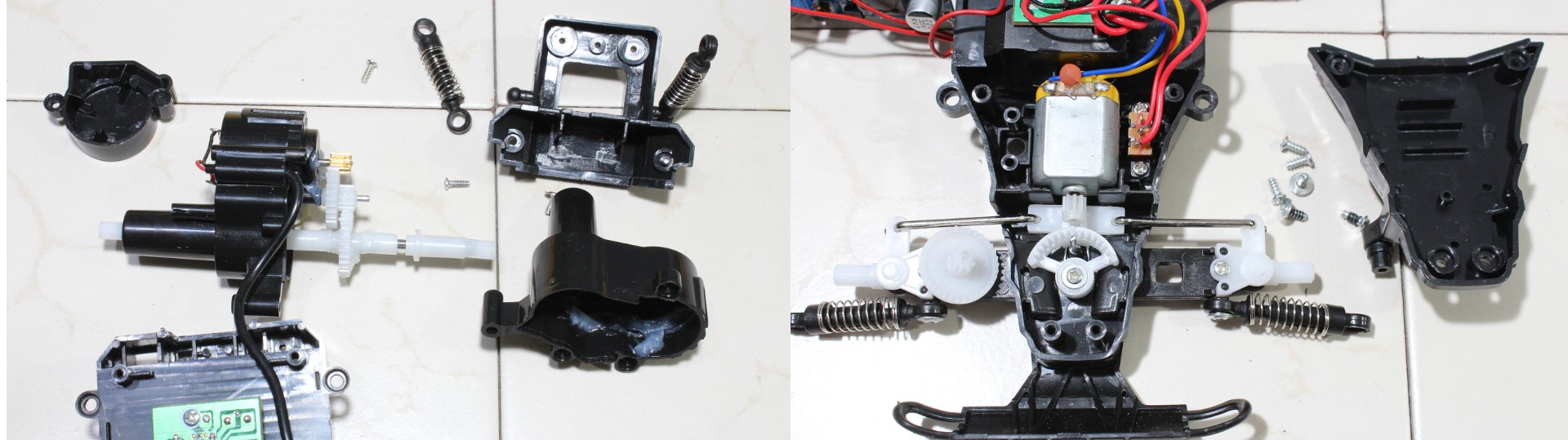
The gears of drive motor and steering don't look too bad and test drives will show how many miles the mechanics can do:
![]()
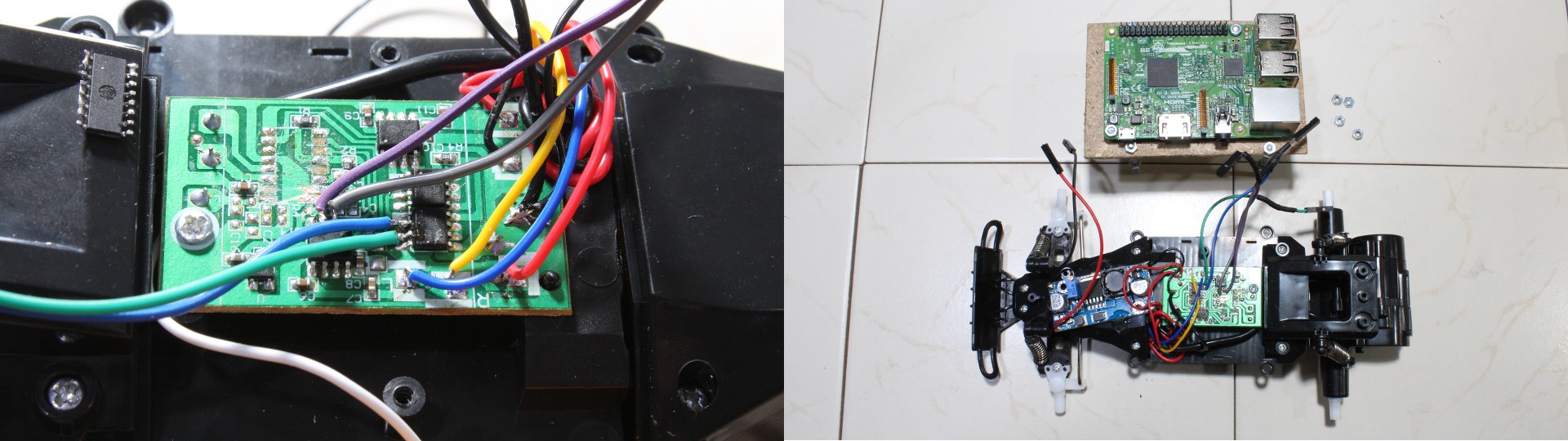
I connected a Raspberry Pi 3 to the h bridges of the car:
![]()
The model car came with 4 NiCd cells and I have added a voltage divider as battery sensor to avoid deep discharge. I will add a holder for 4 AA batteries. With those commonly available NiMH cells you can operate the rover almost continuously if you replace the batteries with freshly charged ones each 2h.
All details of the conversion will be published in a video about my latest rover that is currently in the process of editing.
The software is nearly identical to the version I used with my previous rover R6 that is today (October 15, 2017) out for another test run:
http://homofaciens.de/robospatium-controlstation-R6_en.htm
I will also bring my first outdoor rover R5 into the playground, however this robot is powered by lead acid batteries that allow no more than 2h of operation, thus it wont be online the whole day:
http://homofaciens.de/robospatium-controlstation-R5_en.htm
![]()
Hope to bring R7 online for a couple of hours before the deadline of this year's Hackaday prize that ends tomorrow. Have a look at my RoboSpatium to see if R7 is up and running:
http://www.homofaciens.de/robospatium_en.htm
It's almost all done to put a first earth explorer into a tiny parcel - some price money would speed it up ;-)
Come together in exploring our planet!
-
Thanks Hackaday for promoting my project
10/01/2017 at 08:51 • 0 commentsMy earth explorer was mentioned in the Hackaday blog:
https://hackaday.com/2017/09/29/earth-rovers-explore-our-own-planet/
Thank you Bryan for the entry.
R6 is up and running again for another test:
http://homofaciens.de/robospatium-controlstation-R6_en.htm
Most of the changes in software I had planned to do today were implemented during the additional test last Friday, so there are only minor changes in the scripts to be done today. Especially in the night hours when the camera uses long time exposure of up to 1s, I will try to speed up transmission.
![]()
-
Black & White
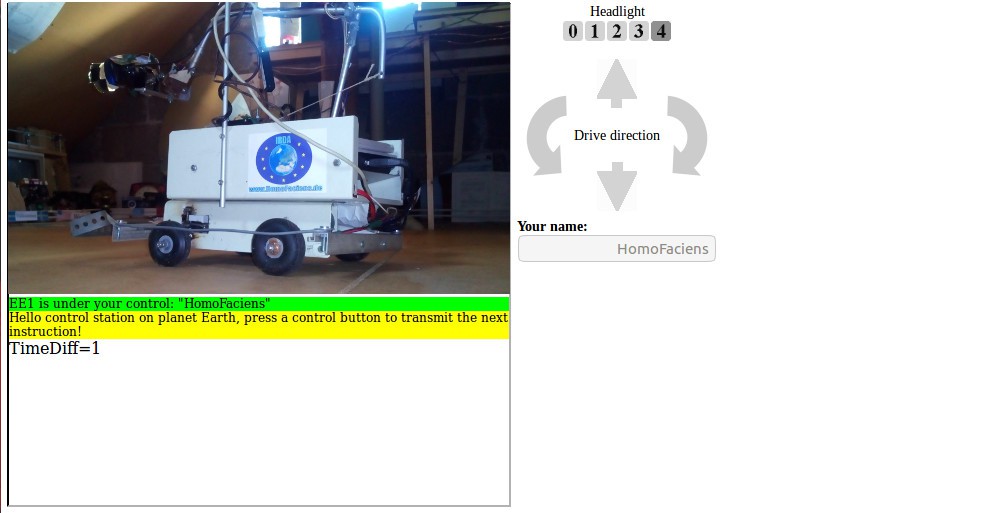
09/23/2017 at 10:35 • 0 commentsToday's test run of R6 transmits a live stream in grey scale:
![]()
Go to the control center to drive my rover today (September 23):
http://homofaciens.de/robospatium-controlstation-R6_en.htm
During this test run I will try to compress the picture data to get a stream of still images even from areas of this planet that still have low Internet bandwidth. The black and white images give you the impression of driving a robot on the moon during the early days of cosmonautics. Have fun!
-
Transforming a commercial RC car into a rover
09/16/2017 at 16:24 • 0 commentsI took a model RC car, a Raspberry Pi, a camera module, a double H bridge, a step down converter and a battery with higher capacity to turn the vehicle into another rover of my RoboSpatium. The conversion was a quick process and now I can do some coding to try a couple of variants I have in mind for transmitting images from the rover to your browser. The first public test run will be on
Sunday, September 17 at 10:00 CEST (UTC+2)
The software variant I am using in this test run transmits still images in intervals of approximately 5 seconds. Become part of my test team by driving around with my rover when it is up and running. Some feedback about your driving experience would be nice.The rover video:
-
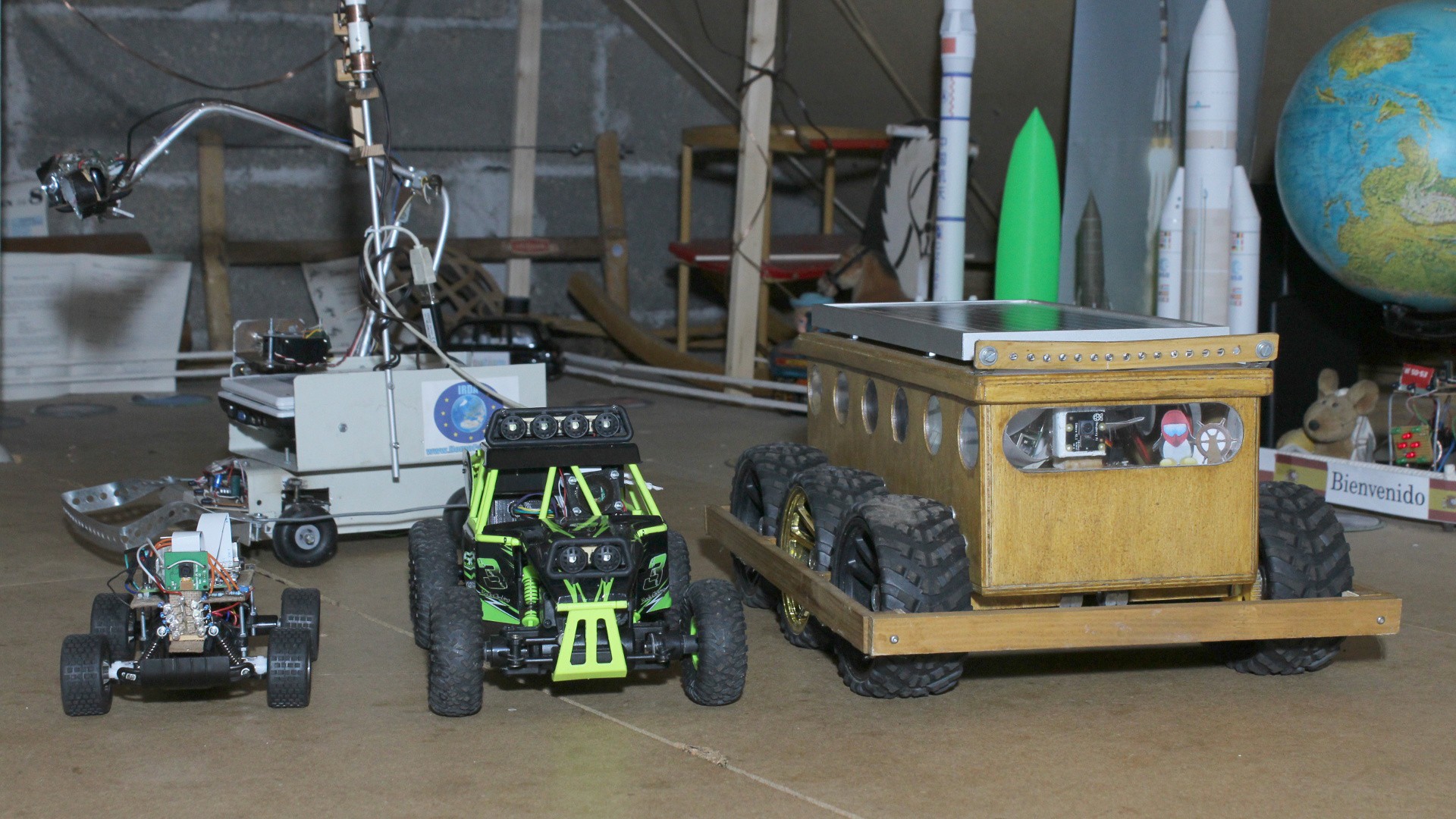
Rover meets rover
06/10/2017 at 16:59 • 0 commentsI did a first test run with all components more or less loosely in the body of my Earth Explorer. The test terrain was my RoboSpatium (my attic) and my latest rover took a snapshot of my first rover ever (that is in service since June 01, 2011, driving more than 10km since that day):
![]()
Soft and hardware of my Earth Explorer are still in a very experimental state, but work goes on over the weekend...
-
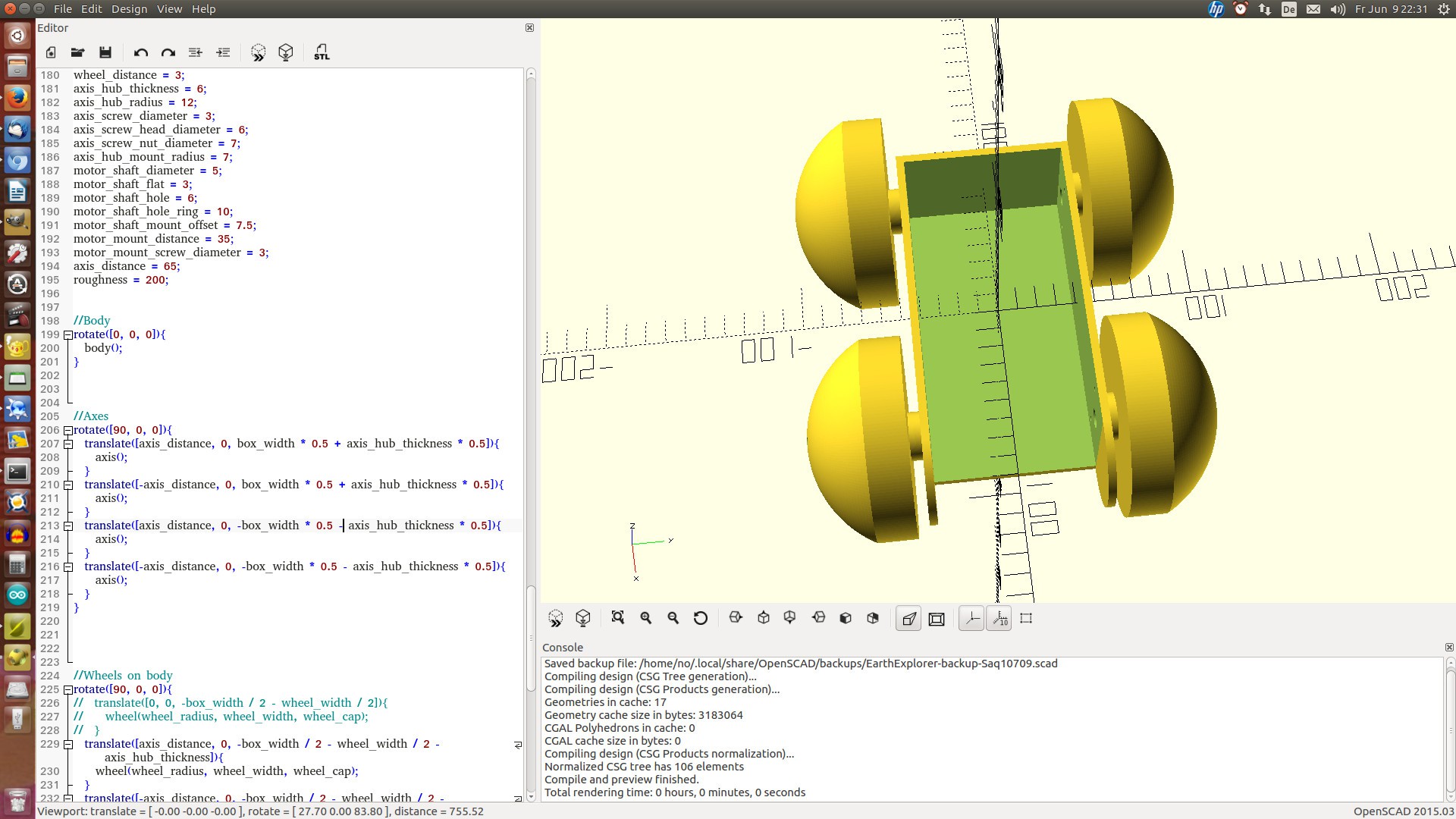
4 wheels
06/09/2017 at 20:43 • 0 commentsThe conceptual design was a 6 wheeler, but now my earth explorer comes with only 4 wheels having a radius of 10cm.Looks like the torque of the geared motors is sufficient to move the rover with low speed on flat ground. Tests will show what slope the rover can climb. Even if only a few parts are printed yet, there are changes in the design. The wheel hub has been changed to fit more tightly on the axis of the motor. For best results, minor changes on the body were made, too.
![]()
![]()
-
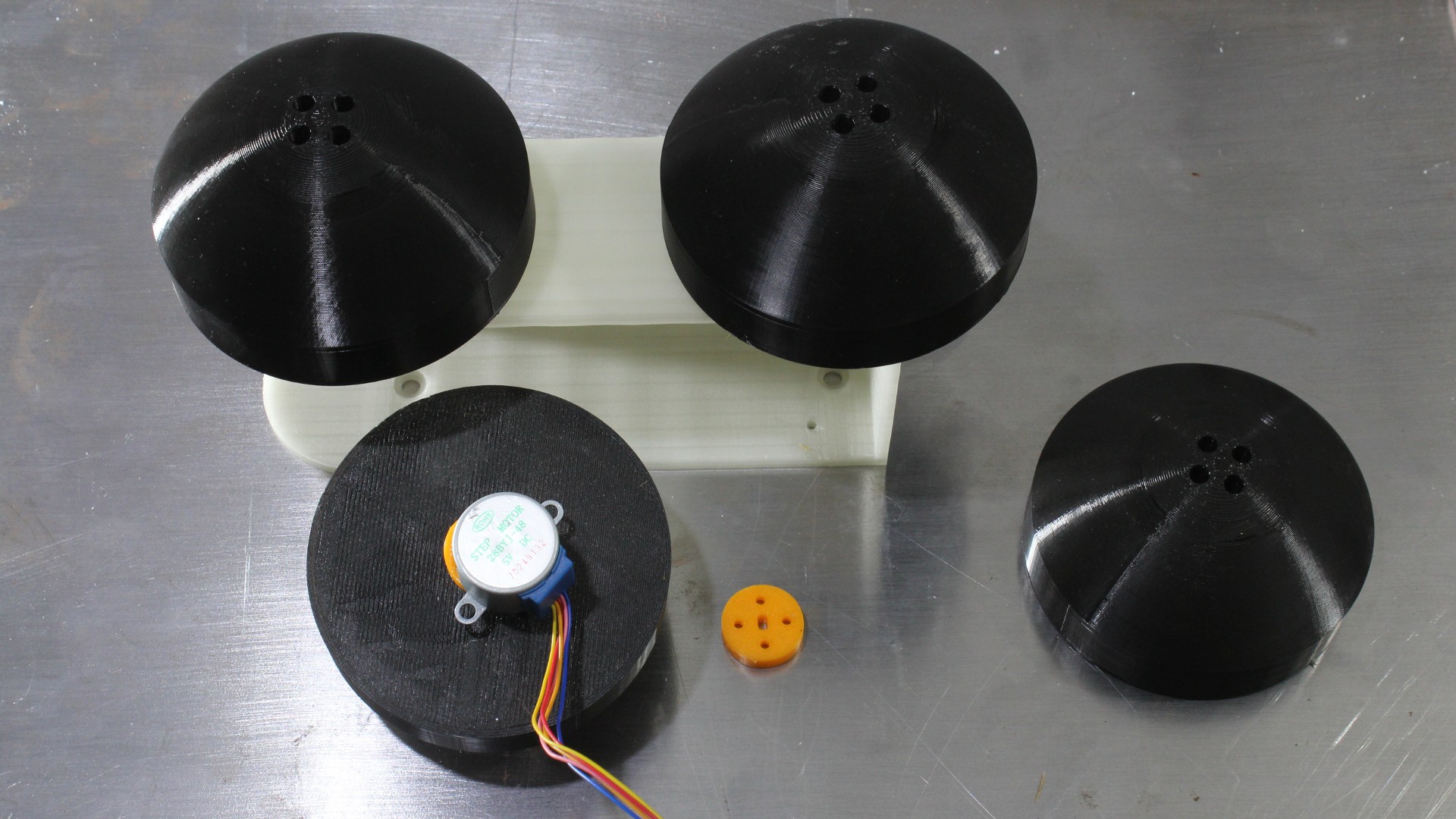
3D printing
06/08/2017 at 21:58 • 0 commentsI have printed the base components of the first Earth Explorer prototype:
![]()
It took 36h to manufacture the parts needed to get a rolling chassis. Things like a battery box, mounts for the driver boards, the Raspberry Pi or the camera are still missing, however I will be able to get a driving rover during weekend. The "Internet of Useful Things" section of this years HackadayPrize comes to an end on Monday which is why I will work on my project the coming days to turn the static camera that transmits photos from my attic into a mobile image sensor which is more useful, I guess.
Earth Explorer in a small parcel
Send a camera equipped robot in a small parcel to mission targets around planet earth