-
Loono, the rebirth, part 2
06/19/2017 at 07:16 • 0 commentsFor this second part, we will focus on the embedded electronics. As a start, let’s recap the functions that will be implemented.
- Each half-bean should be able to interact with the user. That means detecting if the user is holding the shell, detecting if one half is mated with another half (and if it is the good one or a bad one) and answering in consequence through various vibration (variation of frequency, strength, duration, or altogether – think of a soothing, relaxing vibration for a match and a more angry one for a mismatch).
- Each half-bean is energetically independent and should be equipped with a battery. In the first part, it was mentioned that the shells should be perfectly sealed, and no hole, contact or protrusion should be visible. Therefore, “wireless” charging should be implemented.
- Finally, it could be interesting to implement some kind of logging in order to monitor the activity of the user (how successful the game was, how quick the child solved the game, after how many trials, etc.). This would allow monitoring by the parents or educators, whilst also allowing fine adjustment of the various parameters (difficulty of the game, strength or frequency of the vibrations, etc.) to adapt to the disability and sensitivity of each and every one. Since the shells will be sealed once and for all during manufacturing, this communication between the half-beans and the user as to be done wirelessly (Bluetooth, Wi-Fi or other). As a side note, this could also allow remote firmware upgrading if needed.
Vibration
The very basic functionality of vibrating is pretty easy to realize in itself. Vibration motors are available is many shapes and sizes, thanks to the cellphone industry. A special attention has to be paid in driving the motors in order to reduce consumption as much as possible, since the battery in each shell will most likely be pretty small. We definitely do not want to be charging the shells twice mid-game.
State detection
Detecting the user’s grasp is already more complicated. In the first prototype, this was done using and IR LED and receiver side by side. Although this worked, this solution requires a hole in the shell, which is undesired. Also, it detects when you put the shell upside down on a table, which is also undesired.
So, we need to detect touch through a 2 or 3 mm wood shell, but also be able to distinguish between the user’s grasp and the shell simply resting on a table or sitting in its charging pad.
One example of such problem if cooking plates controls. They use capacitive sensors placed beneath the glass surface, allowing detection of user’s touch above the glass surface. There is also some kind of algorithm that detects if a finger is touching one button, or if a pan or a wet rag is touching several buttons.
If the inner side of the shell was equipped with an array of capacitive sensors, there could be a way to detect (with a slightly more complex algorithm than the one of cooking plates) the state of the shell. If the user is holding the shell with a full hand grasp, several sensors on both sides of the shell would be activated, or only small, isolated activations if the user is holding the shell with a pinching grasp. If the shell is resting on the table, only a small area would be activated. Last, if the shell is in the charging pad, only one half of its surface would be activated. Or something like that. This obviously needs some more thinking, and a lot more calibration afterwards.
Energy
As the shells are independent and sealed, they need their own inner power supply. This achieved with a small rechargeable battery. In the first prototype, two non-rechargeable CR2032 batteries were doing the job, but this obviously won’t cut it once the product is sealed. The size available in a half-shell severely limits the size of the battery. According to early quick researches and what currently exists on the market, the battery could not be bigger than 500-600mAh @ 3.7V. Also, “Safety is number one priority”, so the battery should be super-safe and protected against over-current, under-voltage, etc. We definitely do not want a battery to explode when a child is holding the shell in its hand.
Also, the battery will need to be charged, and with a sealed shell, the only way to do it is through inductive charging.
Inductive charging is more and more common in modern phones. However, phones have a wide flat area to place a receptive coil. Loono shells are not as big as modern smartphones, and certainly are not flat. Moreover, for aesthetic reasons, it would be preferable to charge the shells when they are matched (two half shells together). Therefore, placing the receptor coils in the shells and the emitter coils in the charging pad is also a challenge of this project. Probably the charging pad will need a redesign, since it is rather flat right now and would provide very little surface to place matching coils.
Microcontroller
In the previous paragraphs, several functions were described: vibration, detection of user’s grasp, detection of match or mismatch. These are the most basic functions of the product and exist more or less in the first existing prototype. There are however some things to improve in their implementation.
For now, all this is handled by a small Picaxe microcontroller that does the job just fine. In the introduction, we also spoke about connectivity. Loono is designed to be a toy, but nonetheless an educative toy for children with disabilities. Loono is expected to help children relax, have fun, but also learn and improve their senses. Loono could be used to help children with Braille learning, by training their touch sensitivity. For this, game parameters need to be adjusted according to the child’s abilities and progress.
To bring back this information from the shells to the user, there needs to be connectivity, through Bluetooth, Wi-Fi, or other. The parents, or educators, could then monitor how well the child played: for how long, how many games, how many trials before he or she made a match, etc. With that information on hand, the difficulty could be modified, by making weaker or stronger vibrations, or with less differences between each shell pair.
Speaking about microcontroller, Wi-Fi and capacitive sensors should ring a bell to everyone: ESP32. Yes, the last prodigy from Espressif handles Bluetooth and Wifi, as well as 10 capacitive sensors, from the low price of a few dollars. As a plus, it's sold as "low-power," which is always a nice feature in embedded applications.
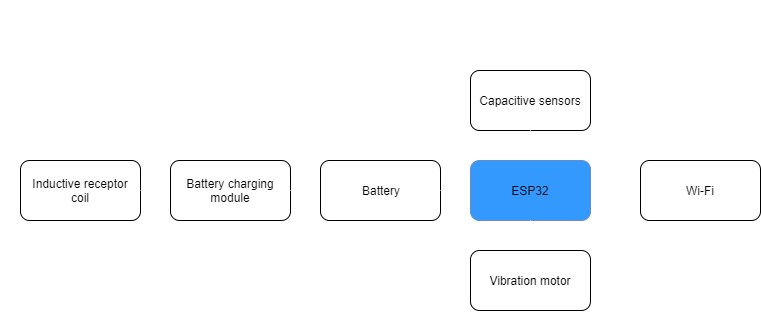
To summarize, below is a diagram showing the basic structure of a single half-shell:
![]()
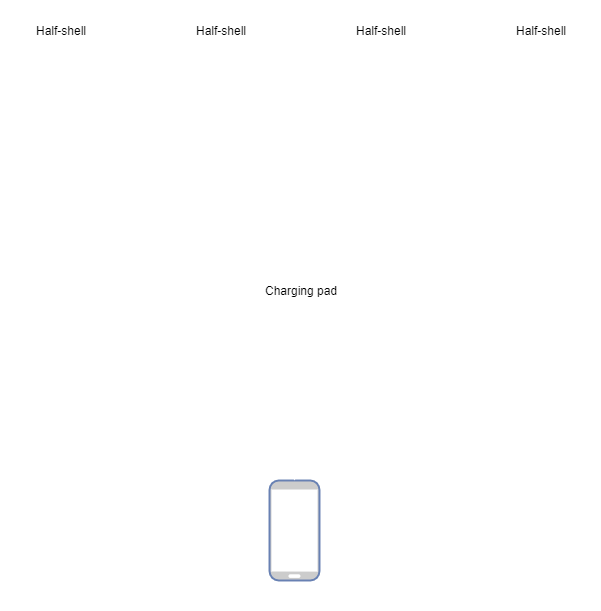
On a higher level, the shells would communicate as shown below:
![]()
The charging pad would host a hidden Wi-Fi network (not accessible to the user), on which the shells would connect. This allows communication between the shells and the pad to log information. Then, the pad can connect with the user through a mobile app and a Bluetooth connection.
Conclusion
This log establishes an ambitious roadmap for the future of Loono. There is a lot to do, to learn, before this all works smoothly. As usual, all comments, remarks, opinions are more than welcome. If you have experience with any aspect discussed above, please share with us!
-
Loono, the rebirth, part 1
06/07/2017 at 14:09 • 0 commentsIt has been a while since the first entry (life happens), but it only meant gaining momentum in order to jump further!
The initial description stated that some prototypes have already been built. But since this is a work in progress, several improvements need to be done before the product reaches its completion.
Therefore, let's start by listing what has been done, what is good in that and what needs to be improved or even rebuilt from scratch.
For this first log, we will focus on the mechanical parts (the enclosure).
Enclosure
A distinctive sign of Loono is its classy shell. A wooden, smooth, natural shell that consists in two parts satisfyingly mating. Hours of research and drawing have gone through this design, and it sure delivers. The shape is enjoyable to hold and play with, even for non-blind people. Thus, this should remain as is.
However, there are several details that are less satisfying and require improvement.
First, Loono will be handled by people with disabilities, who might not be fully aware of their environment. The shell needs to be completely shockproof so it doesn't crack when falling on the ground or even accidentally smashed on a table.
Second, the shell should be completely sealed. Smooth, no holes, no protrusion, no electrical contacts. Remember, users will very likely not see the object and will discover it by touching with their hands or their skin. We do not want to risk any injuries that would ruin the experience.
Third, the shell hosts the electronics inside. We will go in details about what it hosts later, but the inner surfaces of the shell will need a specific redesign to adapt to the upcoming changes.
Finally, design for manufacturing. Prototyping CNCed wooden shells was rather expensive. Since Loono consists in several pairs of shells (at least 4, maybe more), each one should only cost a few $/€ to manufacture. When redesigning the shells, special care need to be taken to facilitate manufacturing (few operations, minimum loss of material, etc).
Pad
For blind people, it is essential that things are always well in place, so they can find it with ease. Loono is no exception to that , and therefore requires a pad to put the stones aside when not using them. A pad already exists, but there is one problem.
Spoiler alert on Part 2: Each stone will be equipped with a battery, with no external port to the outside world. Does that sound like inductive charging? Yes it does. In order to implement inductive charging, the emitter and receiver coils need to be placed specifically. The pad, as it exists now, might not be suitable for that, and will likely need a redesign.
This is all for the mechanical part. Part 2 will deal with electronics and will not be as short as Part 1, so stay tuned and expect more! Comments, opinions and tips are more than welcome!
Loono
A tactile didactic tool based on vibration for children with combined hearing and vision loss