 Mark Mullin
Mark MullinThe interesting thing about editors is that 30 minutes of work on their part nets you dozens of hours on your part. I had the good fortune to get some very useful advice from a tech at ServoCity on the original automated platform design, and well, that led to a lot of redesigning. Here's a picture of some of the new bits.
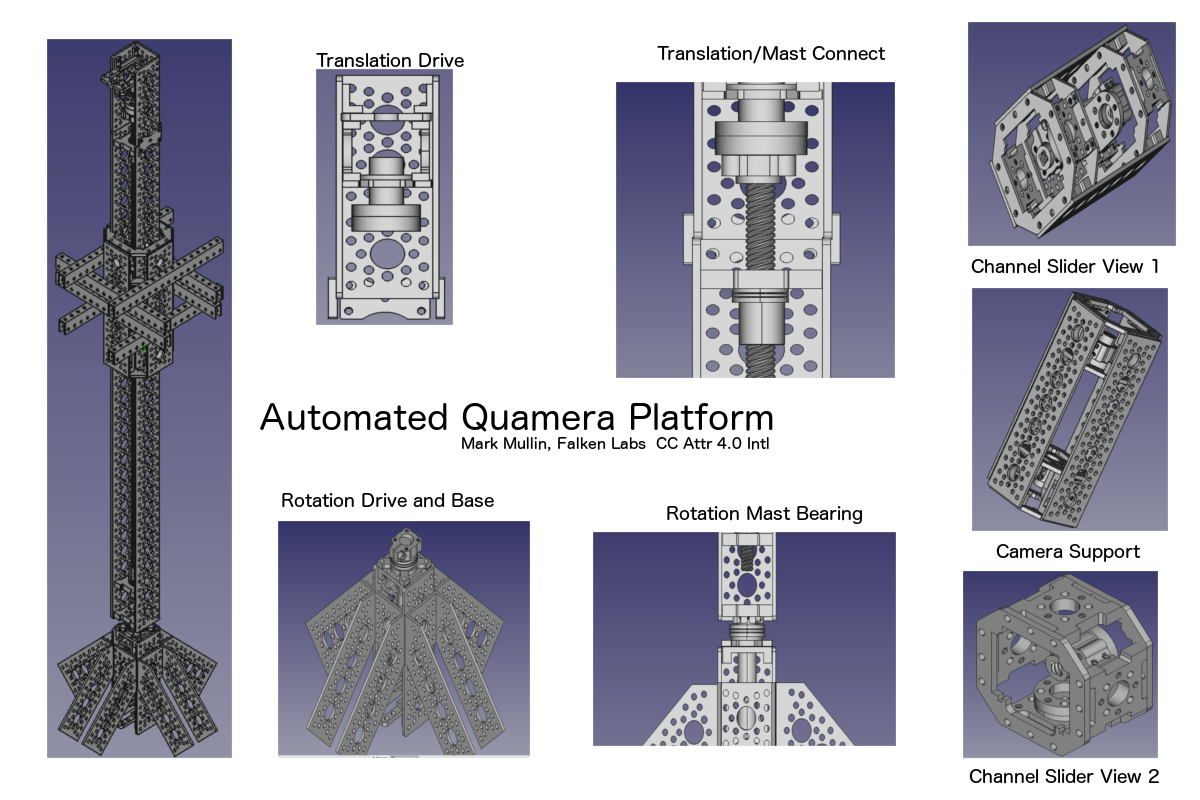
And another attempt at a writeup on the mast (I find mechanical engineering to be an effort of shepherding a horde of levers bent on self destruction) Links are to updated documents.
This is a robotic platform for a multi camera machine vision system to allow it to rapidly collect high resolution high quality RGB-Depth images in a spherical field of view. This platform helps test and calibrate algorithms that perform much of this work using basic trigonometry, before the results need to be handed of to more sophisticated machine vision systems. This supports the fundamental project hypothesis that mechanisms in insect vision, and lower level mechanisms in mammalian vision for image fusion and depth perception take place at a pre-cognitive level. A full writeup on the project is available here, a detailed BOM is available here, and here is a site that tracks the live status of the larger Quamera project.
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.