 Jure Tuta
Jure TutaI have finally shoot a video of my robot, I hope you all like it. In future I plan to upload more details including plans for laser cutter, schematics, source code, etc.
All engineering has been done by me. I've done all mechanical design and construction, all electrical stuff and have written all the source code except some free libraries I used.




 mdhakin
mdhakin
 Ted Huntington
Ted Huntington
 deʃhipu
deʃhipu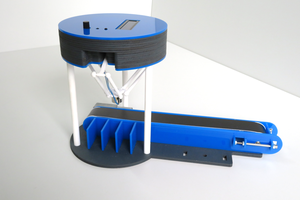
 Pascal Buerger
Pascal Buerger
Hi, unfortunately this year the project is more or less at the standstill because I have just too much work for my 1st year of PhD (and this robot is not my part of my PhD :S ), I expect more time in next year to work on the project. Arms are not my main goal for now, next goal is to use two 6-DOF (3-axis acc and gyro) and one 3-DOF (acc) sensor [which are already mounted and prepared for use] in a feedback control loop to achieve better control and stability of the robot at higher walking speeds.
Like I wrote in the one of the posts, robot was built to mimic human, therefore I didn't cheat and put batteries in the foots (to lower center of mass [CoM]), I put it in the "chest" part, therefore it is as in human - has most mass up in the chests. I also tried to keep proportions "human-ish", although bigger (wider) feet would give me much more stability and allow higher walking speeds.
Why am I writing this? -To answer your question about arms: With consideration of what I have written above, I am not planning to add arms for now, because robot would probably get just too unstable if I'd be adding more and more weight above its CoM.
Thanks for the question and compliments.
Regards, Jure