 Dan Radez
Dan Radez-
1Step 1
I've started with a 6 lane version of something close to this: http://www.rahul.net/mcgrew/derby/track/
Mostly the dimetions were used from this site. The actual construction was a bit different. I used 1/4" plywood as the base and cut up a 4x8' sheet of the same plywood I used for the base to make the lanes. Then I lined the edges of the base with 1x2" boards and constructed joints to attach the sections together.
See the project photos to see how it turned out.
TODO: Post some close up photos and more details on the build
-
2Step 2
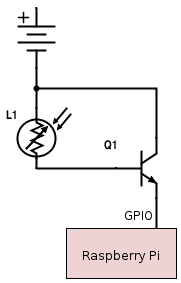
Wire the RPi's GPIO to the start switch and finish line IR sensors. The start switch can be wired directly to the Pi's GPIO port. Each lane needs an IR photo resistor and NPN Transistor wired to the Pi's GPIO like this:
![]()
I used RJ-45 jacks to connect the start line switch and photo resistors to a PCB. The transistors and a header for a ribbon cable to the Pi are on the PCB. See the project photo with the 2 RJ-45 jacks on it to see what it looks like.
See the code to know which GPIO ports to wire the start and finish hardware into.
-
3Step 3
Run the Flask application from the code repository to setup the web interface and seed data. (TODO: add details)
Then add categories and racers.
-
4Step 4
Run the heat generating script to generate the heats from the categories and racers.
-
5Step 5
Run the race_controller.py script. This interacts with the GPIO to sense start and finish events and records the data back into the database.
-
6Step 6
View results on the results page in the flask web app.
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.