0%
0%
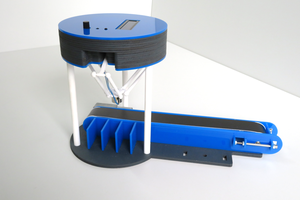
Mapbot
A little two wheeled diferential robot with SLAM
 brian kame
brian kameBecome a Hackaday.io member
Already have an account? Log in.
Just one more thing
To make the experience fit your profile, pick a username and tell us what interests you.
Pick an awesome username
hackaday.io/
Your profile's URL: hackaday.io/username. Max 25 alphanumeric characters.
Pick a few interests
Projects that share your interests
People that share your interests


 Pascal Buerger
Pascal Buerger
 Malte Ahlers
Malte Ahlers

 Valentin Ortega
Valentin Ortega
Did you manage to implement slam algorithm?