 Darryl.N
Darryl.NSince the placement head has 3 relatively low-power steppers, an LED illuminator, limit switches, etc etc, I am looking at using a slave controller. The smoothieboard can support it over I2C or SPI (would prefer UART, but that doesn't seem to be an option). OpenPnP supports it using a sub-driver.
The slave controller would support
- A (alpha) axis - 2x NEMA8 hollow shaft steppers
- Z axis - 1x NEMA17
- top camera illumination ring using PWM
- Z limit sensors - 2x
- top camera enable
- Minimal wiring - 12V, MGND, 5V, DGND, SCL, SDA.
- Reduced cable chain weight and drag
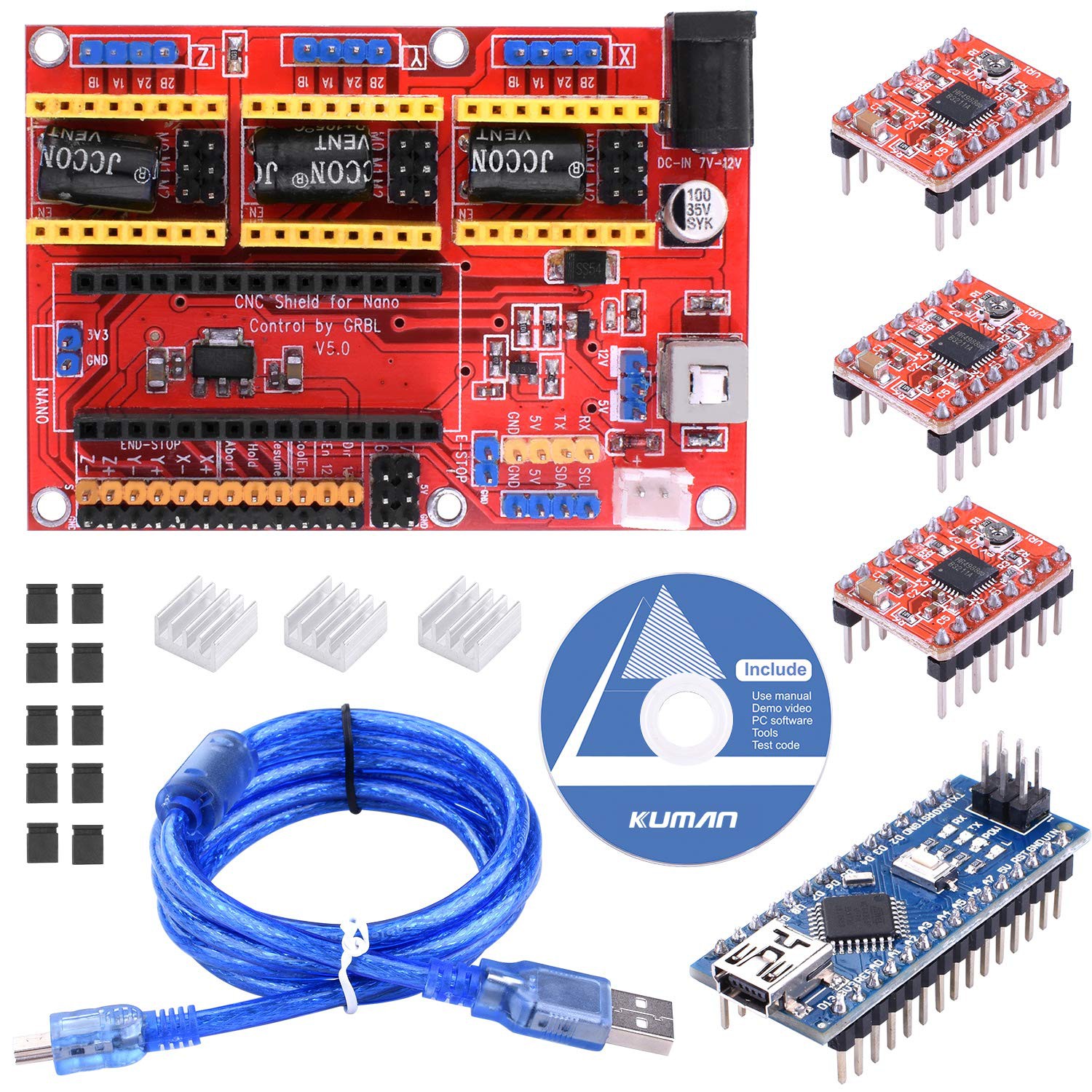
I ordered a 3-channel RAMPS/GRBL board with an Arduino nano for about $20. Looks like it could be mounted on the back side of the head assembly, and would not add much weight. Firmware is GRBL. so able to customize as required. There are about 12 I/Os available in addition to the 3 motors and 2 Z limits, so a small perfboard can be added with MOSFETs signal conditioning, etc.
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.