 ziggurat29
ziggurat29Summary:
Unscientific tests show that range is good; 5 meters has been actually tested, but it is probably a bit more.
Deets:
It's a bit annoying when testing to point the calculator at the sensor and get then aim right and then press the button (I know -- so lazy). The calculator that I'm using for testing has a book-like folding design, so if I open it about π/3 radians, it will stand up on its end, with the IR emitter pointing upwards towards the ceiling. Situated this way, my detector board is next to it with the detector pointed up as well. So, the signal path is out of the calculator, up to the ceiling, reflecting, and back down to the detector.
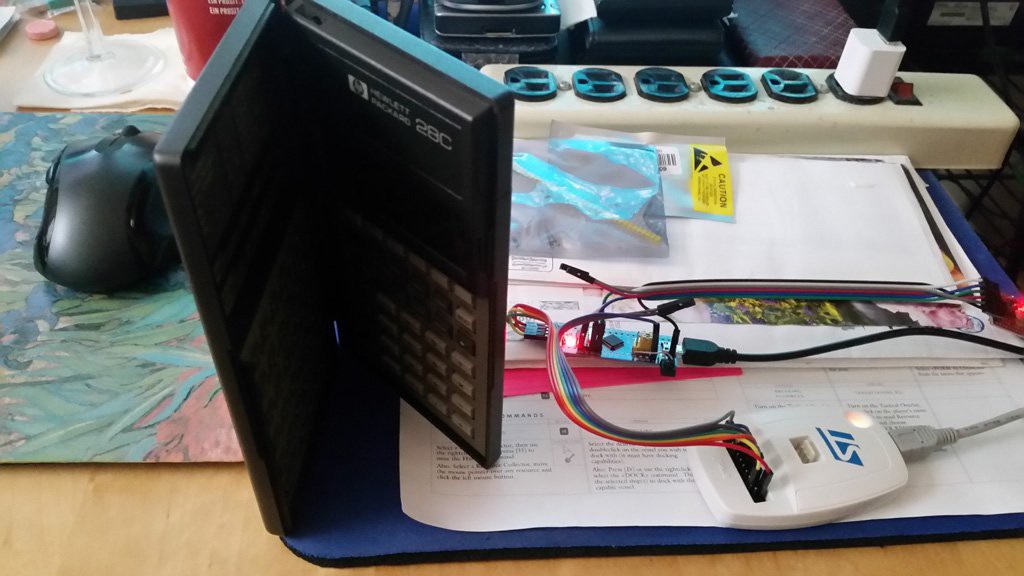
I was happy to find that the signal along this path gets reliably decoded. I measured the distance from the desktop to the ceiling at about 2.5 meters, so the total path is about 5 meters -- and who knows how much loss there is from the imperfect reflector of the matte white ceiling.
Nice! I think the IR part can now be considered good enough for production use, though I still may try some of the optimizations I mentioned in earlier posts.
The resulting API is
//valid data received
void IR_RedeyeCbk_data ( uint8_t by );
//parity bits included
void IR_RedeyeCbk_parityFail ( uint16_t val );
//bad signal was detected
void IR_RedeyeCbk_badSignal ( void );Next:
I'm back on implementing USB CDC device mode.
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.