 metehanemlik
metehanemlikIn this project, we will make an altitude Indicator using a NeoPixel shield. NeoPixel LEDs will turn on according drone altitude up to the 1 meter. The first four LEDs will be light green, second four LEDs light blue, and third four red.
ESPcopter is currently crowdfunding with differing reward levels available depending on the expansion boards and quantity desired.
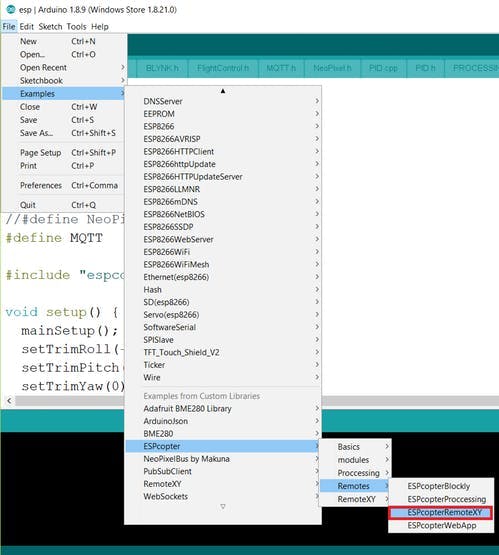
1.) Open the ESPcopter RemoteXY control code
2.) Check the standard control code
#define REMOTEXY_WIFI_SSID "ESPcopter" //ESPcopter Wiffi name
#define REMOTEXY_WIFI_PASSWORD "12345678" //ESPcopter Wiffi pass
#define REMOTE_XY_REMOTE // control method
#include <espcopter.h> // ESPcopter lib
void setup() { mainSetup(); // main settings
setTrimRoll(0);
setTrimPitch(0);
setTrimYaw(0);
}
void loop() {
mainLoop (); // main loop
}
3.) Edit the flying code by using SDK
3.) Edit the flying code by using SDK
SDK: http://espcopter.com/wp-content/uploads/2016/09/ESPcopter-SDKEnglish.pdf
We will use NeoPixel commands and altitude hold commands.


NeoPixel control code:
int altitudeDrone = constrain(round(getOtoMeasure()/45),0,12); // get drone alttitude and convert it milimeter to integer 0-12
for(int i =0; i < altitudeDrone; i++){// for loop for switching the leds on
if(i < 4){ // if altitude of drone is lower than 40cm
ESPsetPixel(i,0,255,0); // on green 0-4
}
if(i >= 4 && i < 8 ){ // if altitude of drone is between 40cm and 80cm
ESPsetPixel(i,0,0,255); // on blue 4-8
}
if(i >= 8 && i < 12){ // if altitude of droneis between 80cm and 120cm
ESPsetPixel(i,255,0,0); // on red 8-12
}
}
for(int i =11; altitudeDrone < i; i--){ // for loop for switching the leds off
ESPsetPixel(i,0,0,0);
}
ESPpixelShow(); // commint
#define REMOTEXY_WIFI_SSID "ESPcopter" //ESPcopter Wiffi name
#define REMOTEXY_WIFI_PASSWORD "12345678" //ESPcopter Wiffi pass
#define REMOTE_XY_REMOTE // control method
#include <espcopter.h> // ESPcopter lib
void setup() {
mainSetup(); // main settings
setTrimRoll(0);
setTrimPitch(0);
setTrimYaw(0);
}
void loop() {
mainLoop (); // main loop
for(int i =0; i < altitudeDrone; i++){// for loop for switching the leds on
if(i < 4){ // if altitude of drone is lower than 40cm
ESPsetPixel(i,0,255,0); // on green 0-4
}
if(i >= 4 && i < 8 ){ // if altitude of drone is between 40cm and 80cm
ESPsetPixel(i,0,0,255); // on blue 4-8
}
if(i >= 8 && i < 12){ // if altitude of droneis between 80cm and 120cm
ESPsetPixel(i,255,0,0); // on red 8-12
}
}
for(int i =11; altitudeDrone < i; i--){ // for loop for switching the leds off
ESPsetPixel(i,0,0,0);
}
ESPpixelShow(); // commint*/
}
Result:
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.