 Radu Motisan
Radu Motisan-
1The Rover platform
Assemble a robot. It can be anything with wheels that moves: either you build one from scratch, you convert a toy or get a dedicated platform. Ideally it should be able to keep pace with a running human.
![]()
Personally I go for 4WD rovers, where each wheel has its own motor (with reducer), and a strong H-Bridge capable of higher current. The movement must be differential, to allow on spot turn around.
-
2The electronics
A microcontroller board and a dual h-bridge is needed to control movement.
![]()
The code I prepared is for Atmel microcontrollers, specifically the ATMEGA328. Go for that if you like, as the code on Github is all set for that.
Additionally you can add a serial Bluetooth adapter , that is to be able to control the robot using your Android phone as a remote. Source code for that is on Github too.
-
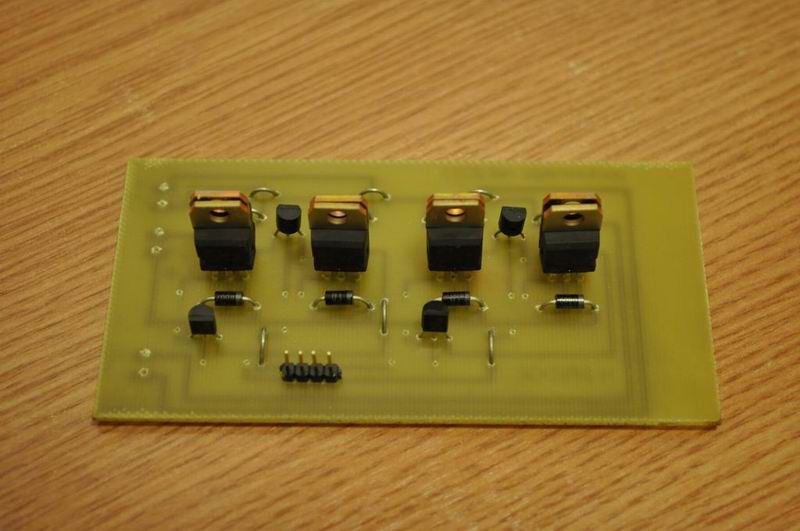
3The Ultrasonic localization
Build at least two ultrasonic receivers (PCB design files are on Github), and place them at the frond of the robot.
![]()
If you want to increase it's sensing capabilities, add more of these, and adjust the code accordingly. You're pretty much done at this step, congrats on building a robo-dog!
Robo-Dog
Develop user tracking technology and demo it using a rover robot to follow its user.


Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.