-
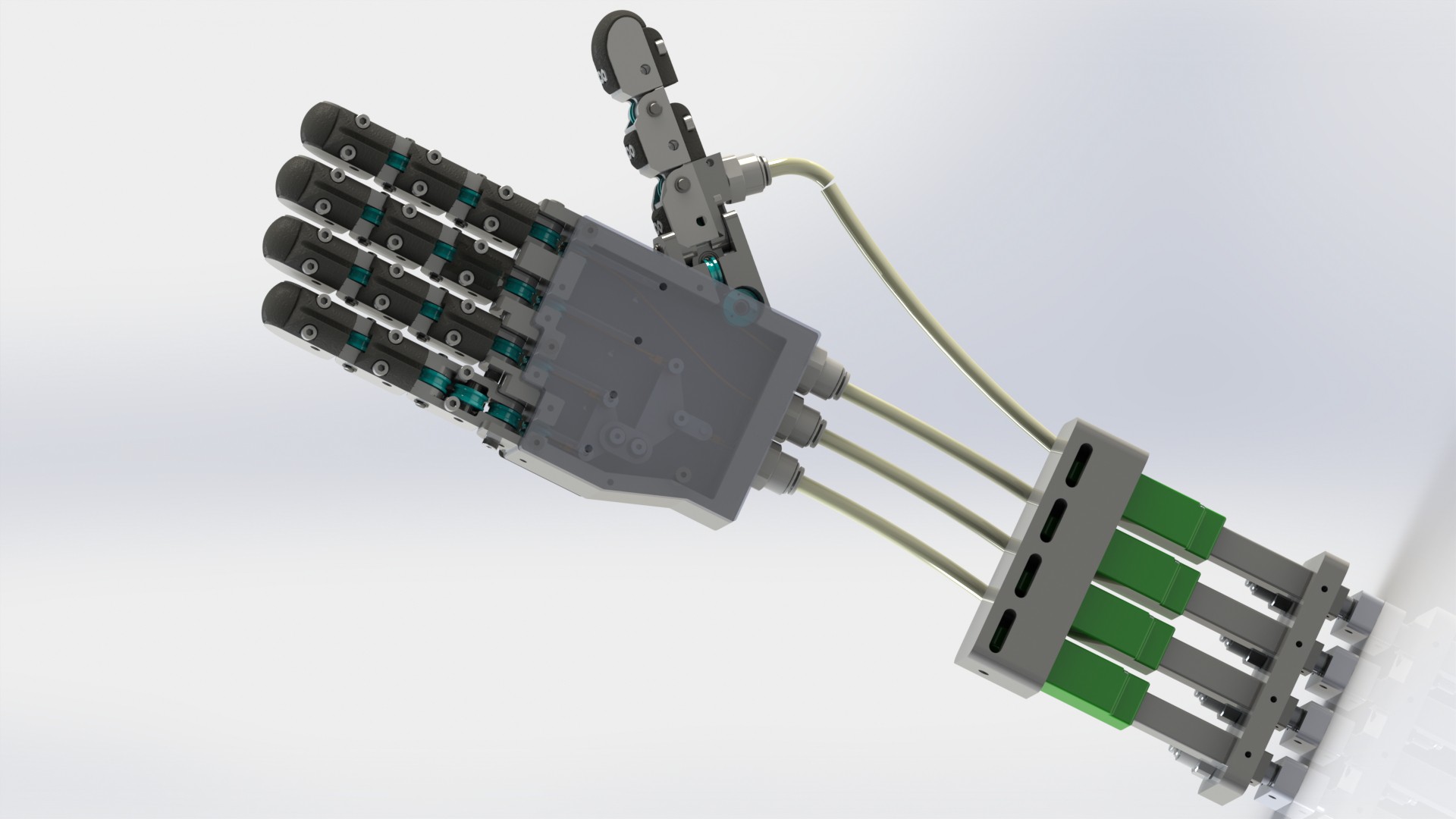
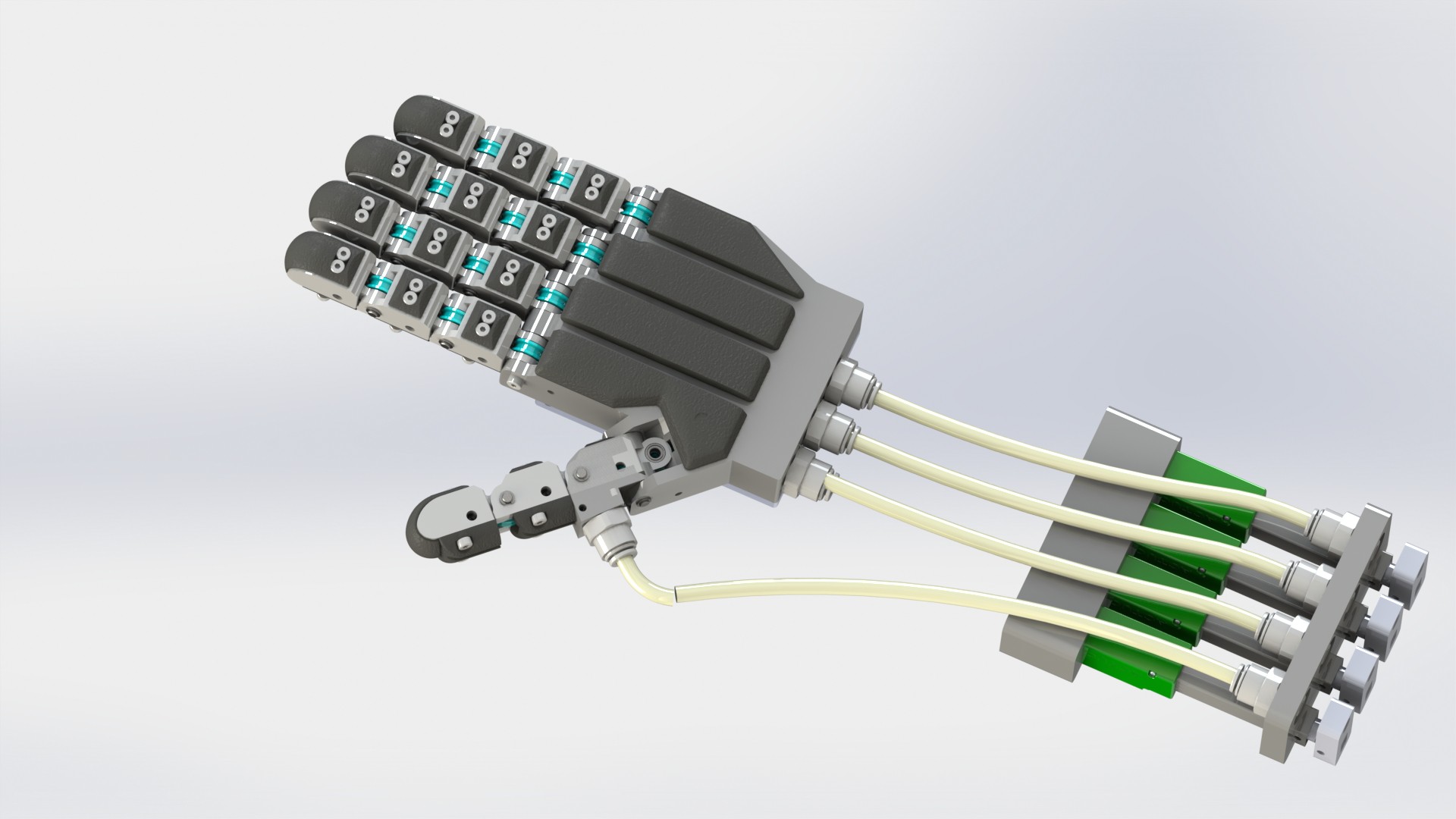
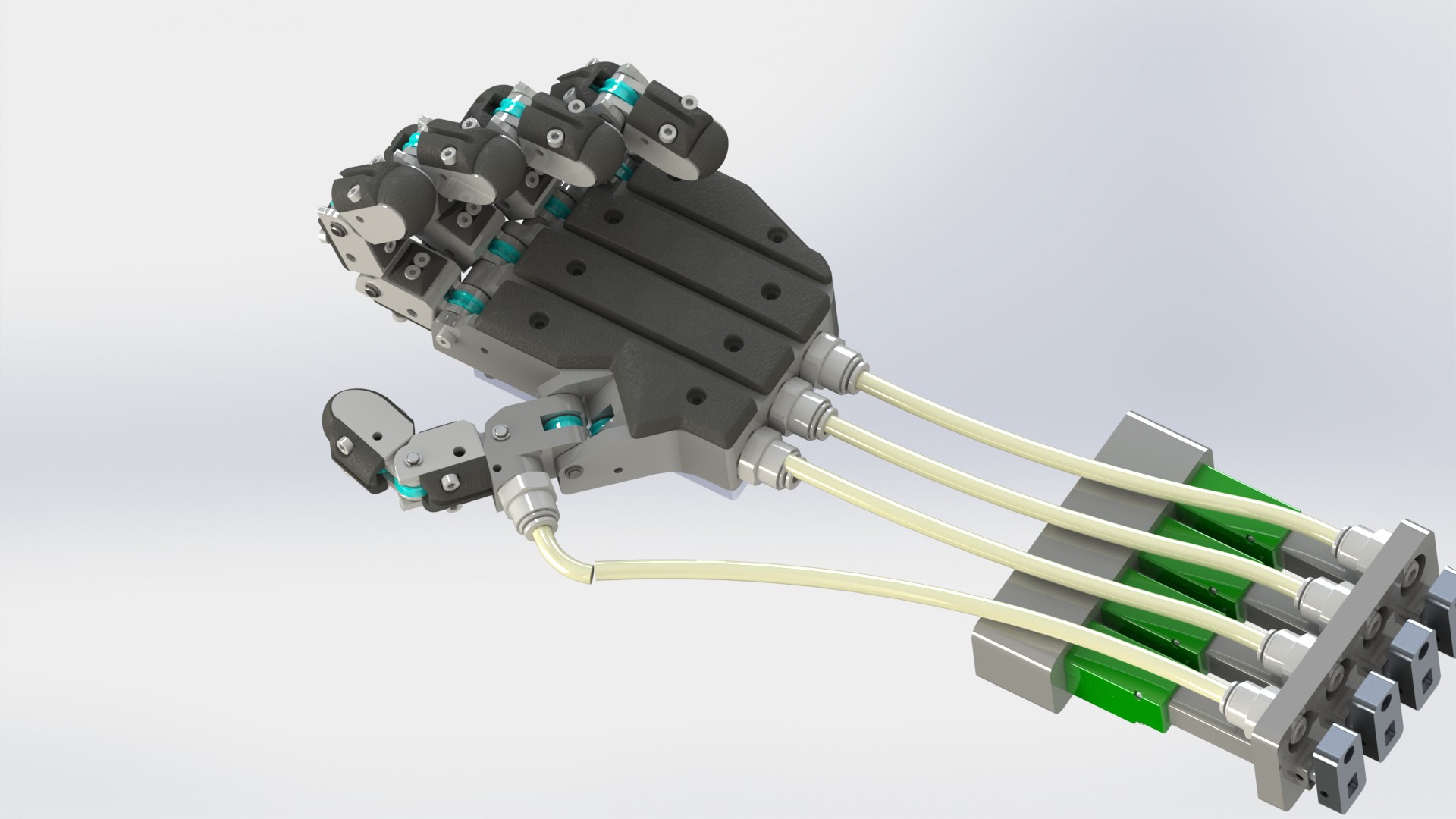
Ready for Testing
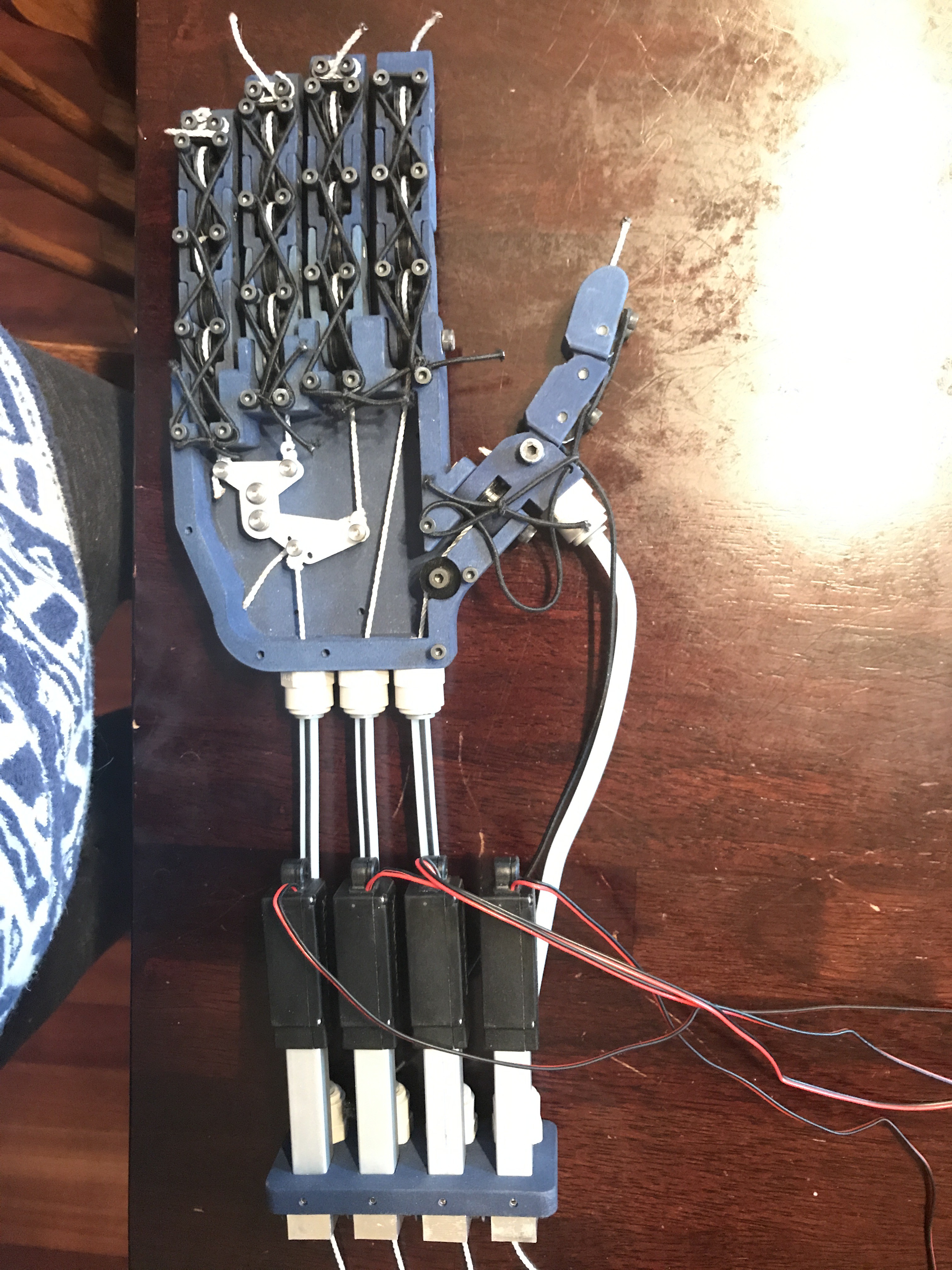
10/18/2017 at 16:11 • 0 commentsUAProstheticHand is now fully assembled! Within the next few days I will be releasing a full release Video showing the capabilities of the hand and how it was built.
![]()
![]()
-
Video Log Update as of October 15th
10/16/2017 at 02:53 • 0 comments -
Dyeing SLS Parts Blue
10/16/2017 at 00:52 • 0 commentsAs discussed in my previous log, I wasn't the biggest fan of the white colour of parts, so I have decided to dye the parts grey. I followed the instructable for dyeing Nylon parts that can be found here.
http://www.instructables.com/id/How-to-Dye-Your-Nylon-3D-Prints/
The process was extremely easy and straight-forward, and although my parts didn't exactly turn out grey I was pleasantly surprised to find out that my parts had turned a dark blue colour! Photos below show the colour of the parts before and after dyeing. I was impressed at how consistently coloured the parts were, as I had expected the parts to be super blotchy. One thing I would suggest for anyone trying to evenly dye their partts is to make sure that your parts are completely submerged in your dying solution (I used RIT fabric dye) and to make sure to continually stir the parts in the dying solution!
![]()
![]()
![]()
![]()
![]()
-
First Look at 3D printed Parts
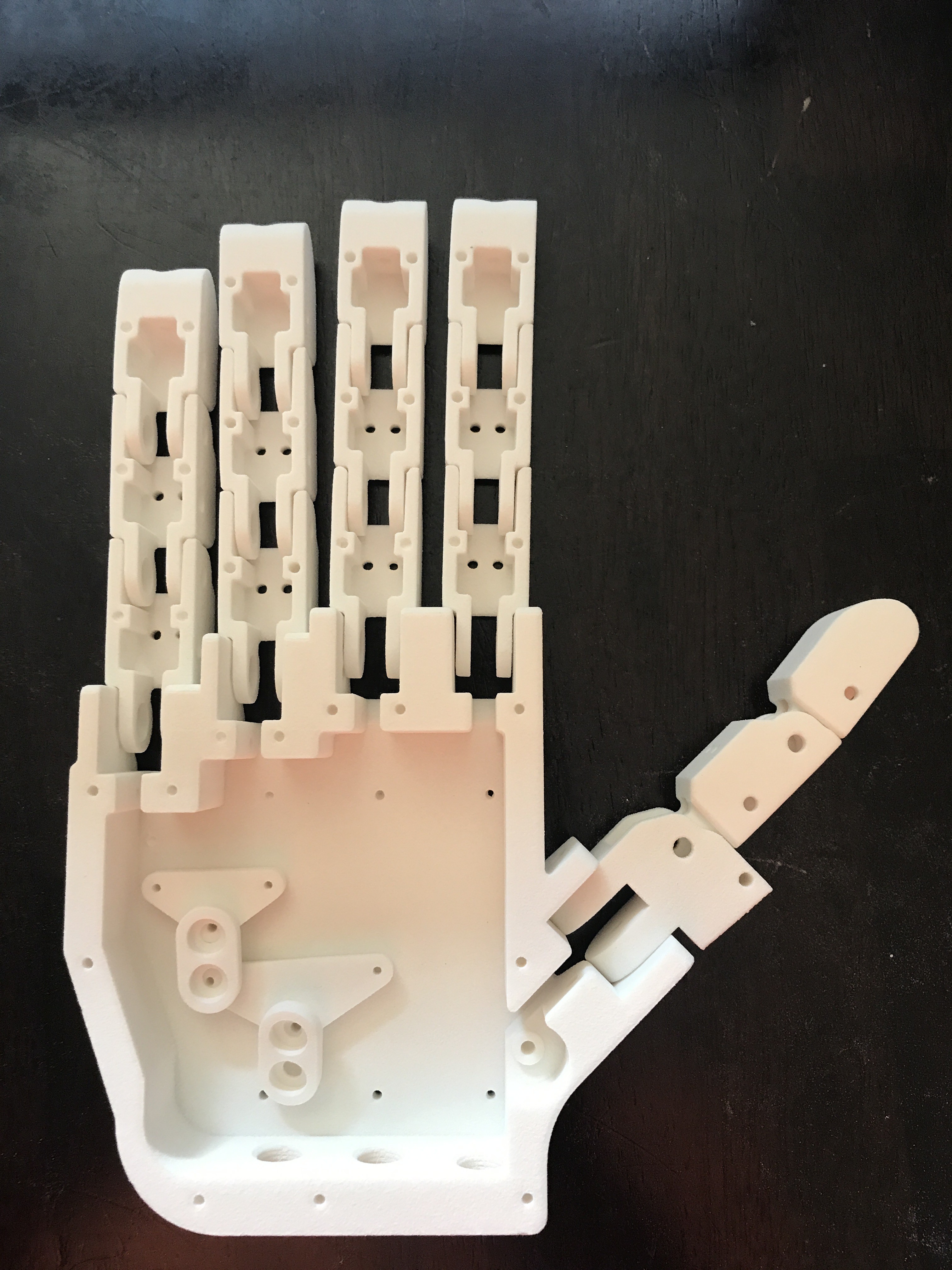
10/16/2017 at 00:41 • 0 commentsParts have finally arrived! All packaged up nicely. I had them printed out of SLS Nylon and they turned out amazingly. the only criticism I have is the colour. I am not too much of a fan of the white colour they came in so in my next log I will be documenting my method of changing part colour via dyeing them!
![]()
![]()
-
SLS Manufacturing of parts
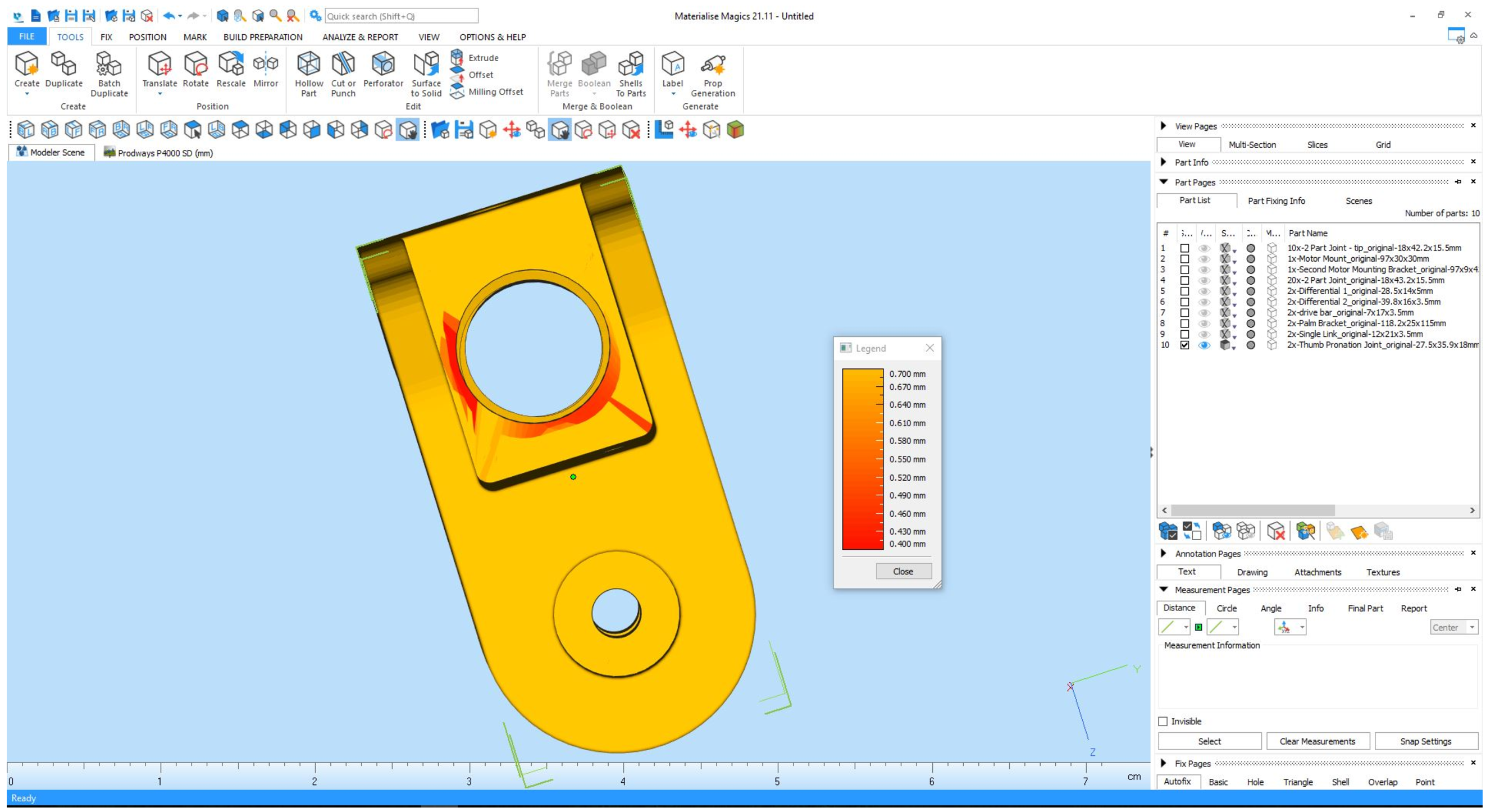
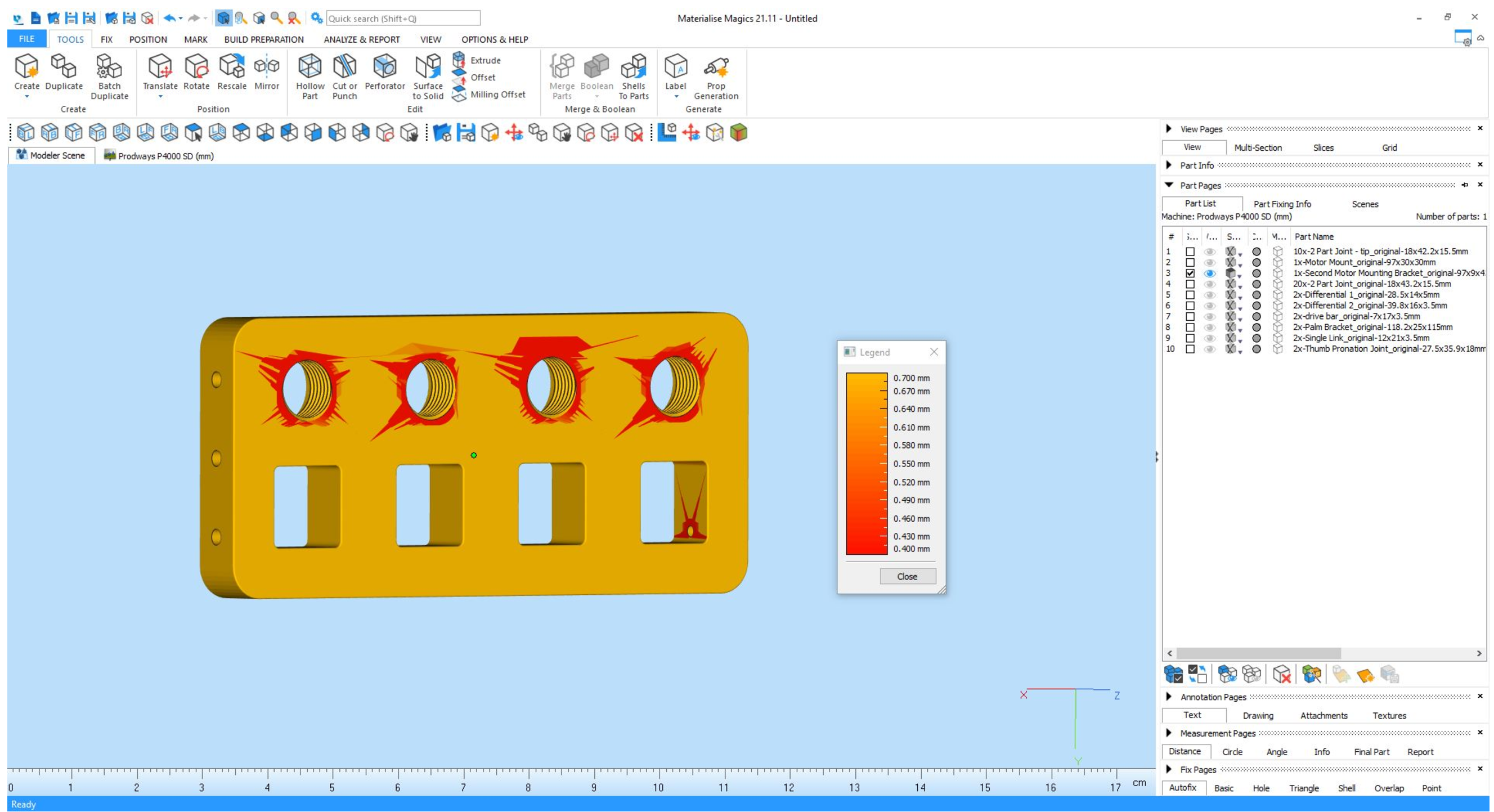
09/21/2017 at 03:09 • 0 commentsToday allot of progress was made in the departments of part manufacturing for USProstheticHand! For awhile I was planning on having parts made on Formlabs' new Fuse 1 3D Printer, but due to unforseen circumstances I was unable to print them on this device. After this is started looking around for cheap SLS 3D print shops and stumbled on a website called 3DHubs.com which is a great resource that helps connect people who want to have parts 3D printed to 3D Print shops all across the world. And at reasonable prices too! Today I selected a print shop in Boston that will be printing my parts out in the next week. There were some issues that Chris saw in my parts as seen in the images below (red spots) as a result of features that were too small in the CAD to be actually printed. Luckily Chris allowed me to modify the parts and make them more suitable for SLS Manufacturing.
The parts should be shipped out of the shop on September 27th and I have to say I am eagerly awaiting them! I am excited to see what my new friend Chris has in store for us!
-
Hackaday Release Photos and Video
09/04/2017 at 03:55 • 0 comments -
Manufactured and Purchased Parts
09/04/2017 at 03:53 • 0 comments![]()
![]()
![]()
-
Actuation and Motor Mounting Design
09/04/2017 at 03:51 • 0 commentsThe next thing that was to be considered was the design of the motor Mount for UAProstheticHand. A decision was made to use bowden guide cable to transfer power as they allow for easy and efficient linear power transfer. The following photo illustrates the design selected.
![]()
-
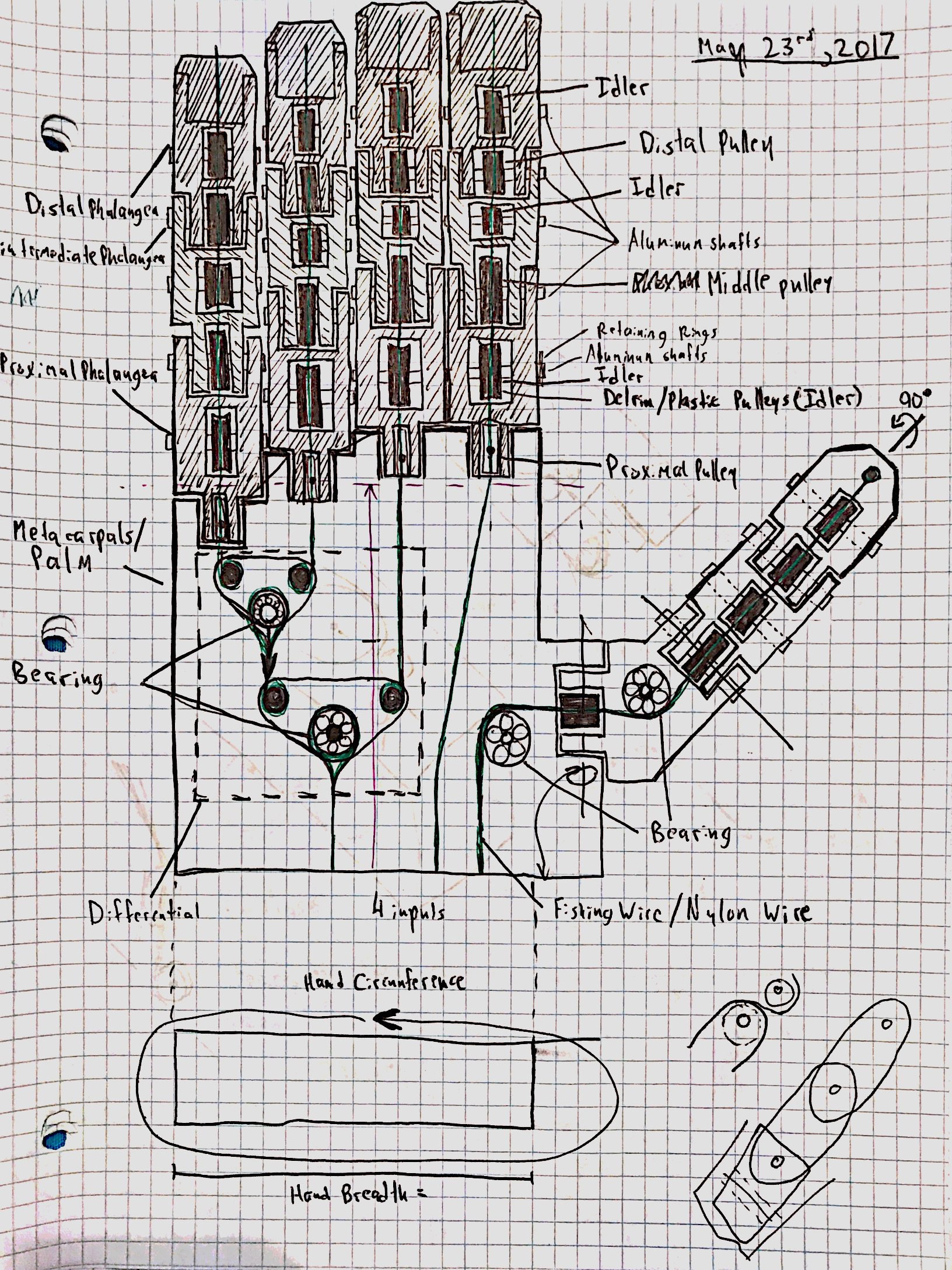
Overall Hand Design
09/04/2017 at 03:48 • 0 commentsThere are five digits in the human hand each of which are extremely important in creating a hand that is extremely dexterous and capable of maneuvering a range of different objects. The index finger and the thumb are independently driven with teh thumb being given 2 DOF, where one degree allows for Abduction/Adduction (rotation of the thumb joint) and) and Flexion/Extension of the thumb joint. A 2 DOF thumb encompasses the movement required for nearly all methods of grasping giving UAProstheticHand the ability to hold nearly any object that it is presented with.
The middle finger, ring finger, and pinky serve a less crucial purpose for the majority of day to day task and tend to move in in sync largely conforming around objects that are grasped. In order to reduce the mental loading associated with these muscles UAProstheticHand implements a double differential to control these three fingers. This reduces the degrees of freedom (DOF)from 3 to 1 thereby simplifying the control of UAProstheticHand, reducing the weight, and the cost. The double differential allows the three fingers to be actuated together and allows the three fingers to conform around any objects it grasps using an active close passive (elastic) open mechanism. a more simplified diagram for the double differential is shown in the second photo
![]()
![]()
-
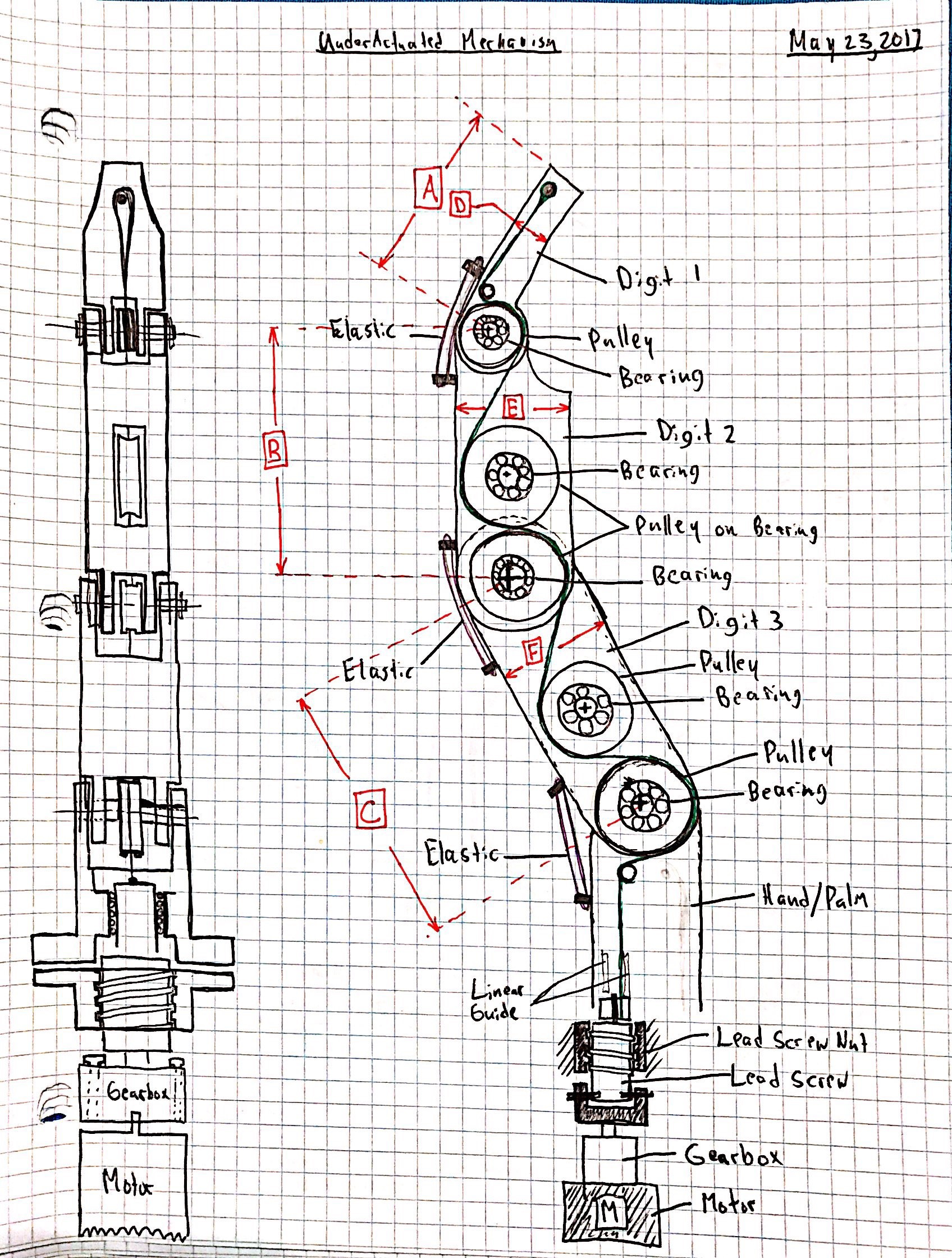
Finger Actuation Design
09/04/2017 at 03:43 • 0 commentsBelow is a concept drawing for an under-actuated finger mechanism driven by a cable or string active close and passive open system. The term "under-actuated" in this case refers to the fact that despite there being 3 joints per finger each finger is only driven by one motor. This allows the fingers to conform around any object that it is presented with as opposed to being rigid and fully controlled. the benefit of this is that the finger can put equally distributed force on an object no matter what the size or shape of the object. This is important in the manipulation of delicate object like for example an egg.
![]()
UAProsthetics - A Powered Hand
UAProstheticHand is a dexterous under-actuated robotic hand designed to grasps everyday objects with low mental loading and at low cost