System Design:
The rotating head is 3D-printed. Mounted on a slip ring. The head is rotating with the help of a salvaged cassette player motor and a rubber band.
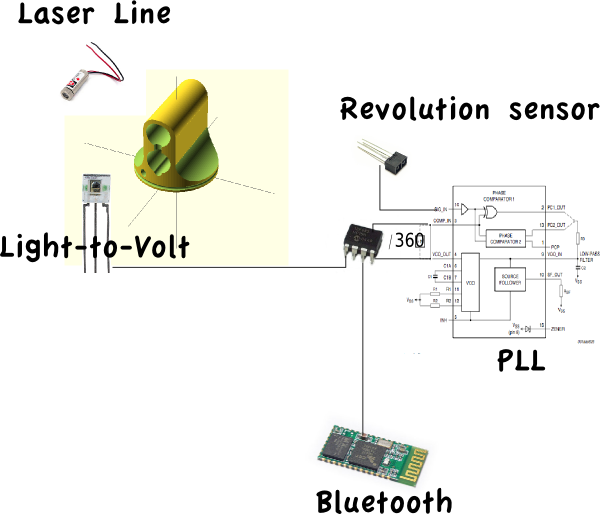
The laser line module is mounted in the head such that the line is vertical. The detector is also mounted in the head.
Every revolution of the head is detected by a IR-reflex detector. And the resulting frequency is multiplied by 360 with a 4046 Phase-Locked Loop (PLL) IC.
For divider in the PLL the timer/counter module in a pic12f683 is used. That micro controller is also responsible for reading the counter when a detection has occurred and send that value (corresponding to degrees) on a serial line.
That serial line will be connected to a bluetooth SPP module so a mobile phone, tablet or computer can be used for display system. And as a future possibility an on-line tactical map.
 Bruce Land
Bruce Land