BTom
BTom-
The new wireless connection
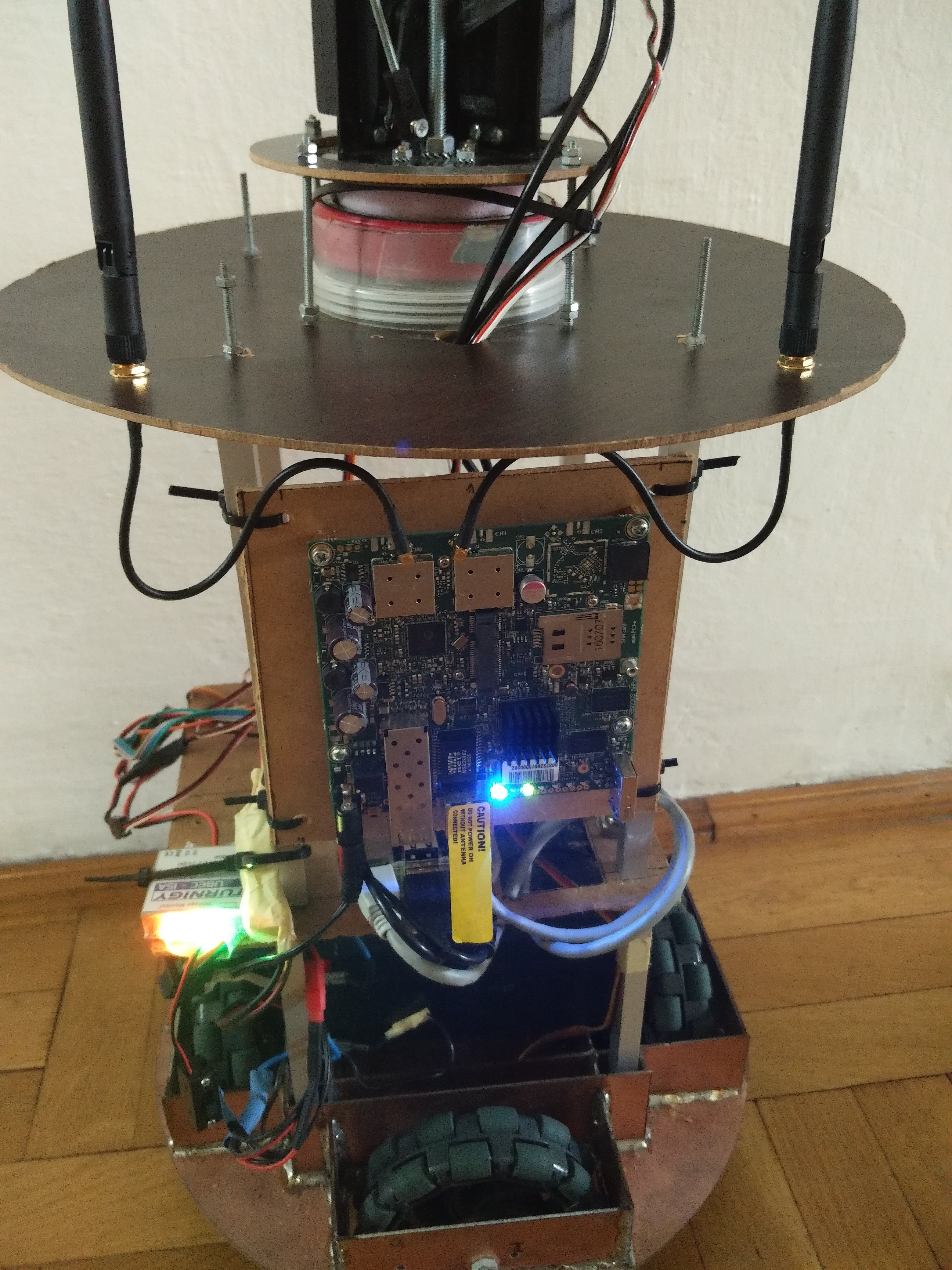
07/23/2017 at 14:56 • 0 commentsIn the previous version we used a Tenda router because the raspberry on board WIFI adapter was not enough. At the presentations in the noisy WIFI environments, we experienced lots of problems with the Tenda router too.
We upgraded to a Mikrotik routerboard. We chose the 2x2 MIMO 5Ghz version, because we need more bandwidth than distance. (RB922)
It has an USB connector where you can plug in mobil internet modems. We tried it with 4G USB sticks and it's worked.
With this new router we can use the robot through the internet. In the future we will test it out, and gather some performance measurement. This will open up new possibilities for the use of the robot.
![]()
-
Motor control solution
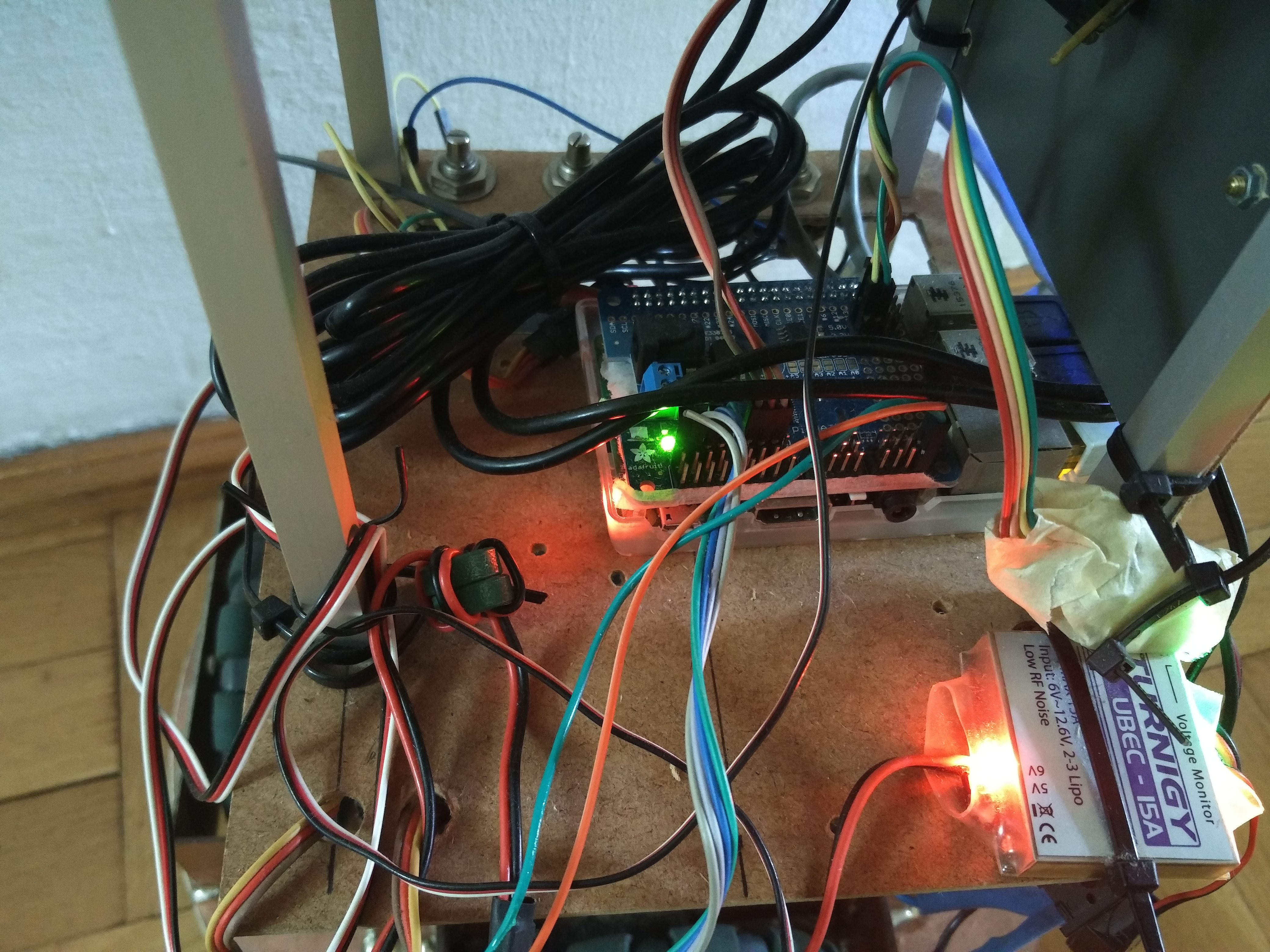
07/23/2017 at 14:42 • 0 commentsIn the previous version we used Arduinos to control the servos.
The current version has a "Adafruit 16-Channel PWM / Servo " shield for the raspberry.
It's easier to program. We can use python scripts on the robot directly to control the servos. We will use this for the autonomous functions on the robot. It's reduced the development time, because we don't have to reprogram the Arduinos every time when we change something in the motor controller raspberry program.
The shield can be powered from the UBEC, and this way we can switch of the motors, but not the whole robot.
![]()
-
3DOF head
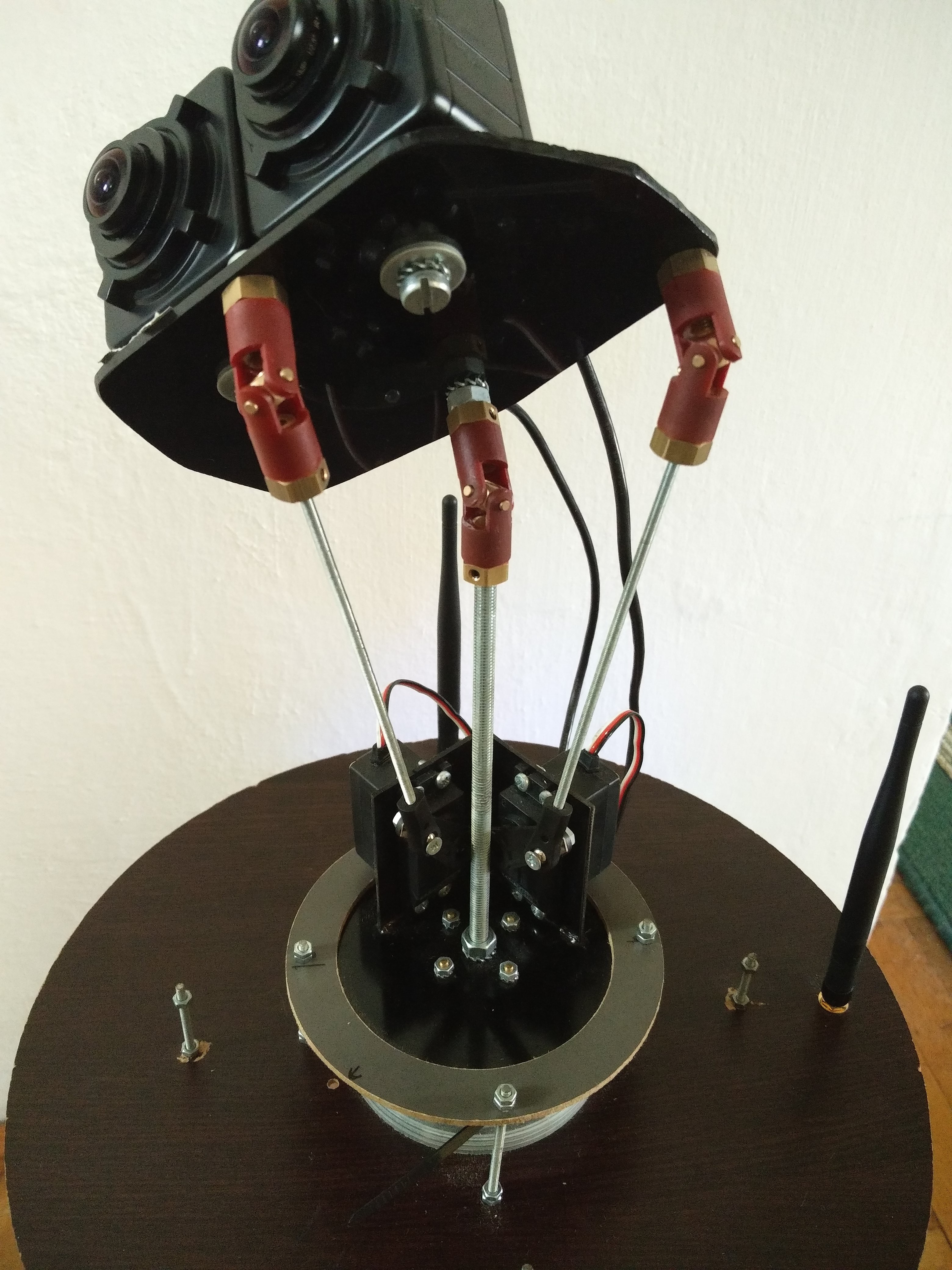
07/23/2017 at 14:29 • 0 commentsThis is the new head gimbal unit. It has more movement interval, and it can support heavier cameras.
In the previous version there was a high load on the servos. This current build reduced the load. (previous version)
We changed the servos to MG995, because it has metal gears, and we hope this solution will be more durable.
At the base plate we upgraded rotation servo connections with proper bearing. It has more weight, but the whole head is more stable.
![]()
-
Stereo cameras
07/23/2017 at 14:18 • 0 commentsWe are using two HD USB camera for the 3D image. The cameras are mounted on the robot head. The robot head can be moved freely at 3 axis.
For the good field of view we put fish eye lenses on the cameras. It's more than what you can see in the HMD, but it's needed for the correct depth perception. Without the high FOV lenses everything feels lot closer than in reality.
It will be better if the eyes of the robot can be upgraded with high FPS (frame per second) capable cameras for more realistic feeling. The higher FPS rate is achievable with higher image compression, but it will need more powerful computing on the robot.
![]()