-
August 25th
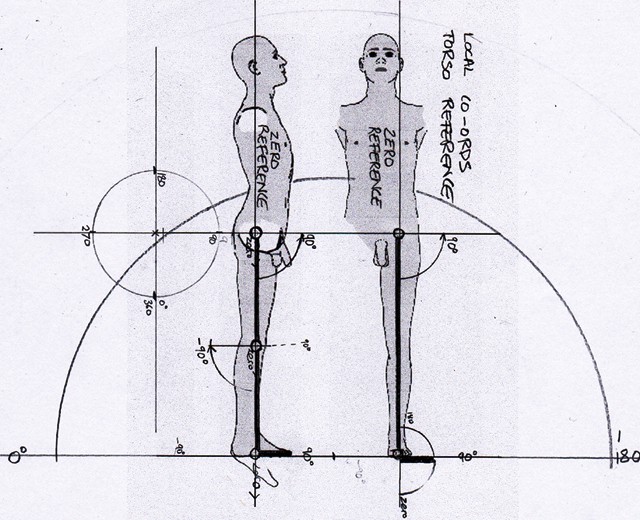
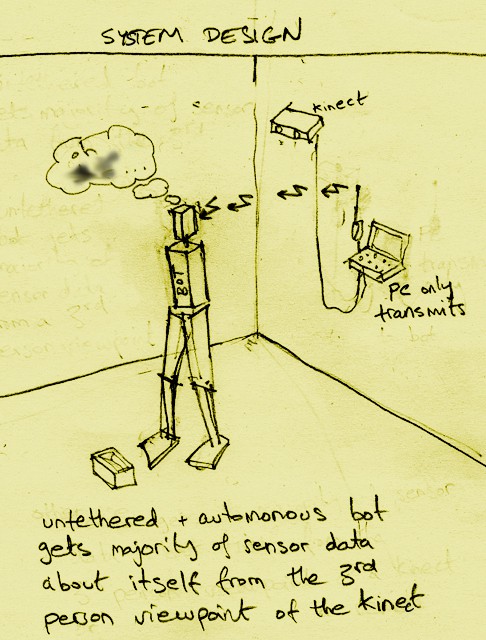
08/25/2014 at 11:33 • 0 commentsNew angle / co-ordinate layout, which I hope will help consolidate internal and world references.
![]()
![]()
-
August
08/19/2014 at 21:47 • 0 commentsI suspend the the structure from the ceiling so I can start working on the motor control.
![]()
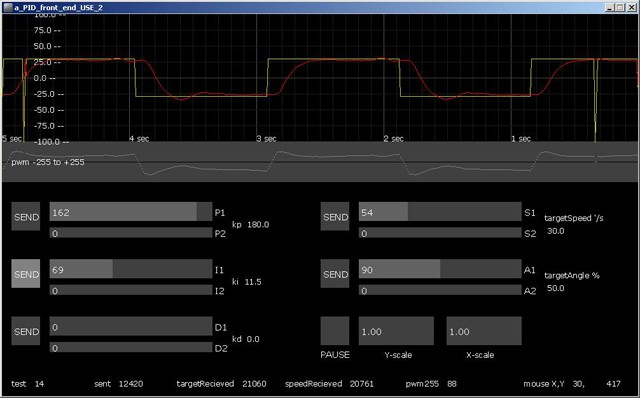
I've never tried pid before, so use bits of 'Brett's' excellent 'Improving the Beginner’s PID' [http://brettbeauregard.com/blog/2011/04/improving-the-beginners-pidintroduction/] as a start.
Quickly realise that raw pot readings as an input for pid is just too noisy to work. Spend an interesting week reading up on + trying out, simple filters, mode, median averaging, rolling averaging and more. But I'm just not able enough to get anything to work well enough fast enough, until I come across the phrase "oversampling", at which point everything becomes much easier. During this time I make a simplistic thing in Processing that lets me send values to the arduino, and graph some output. For a few evenings work its turning out to be the most useful tool.
![]()
-
July
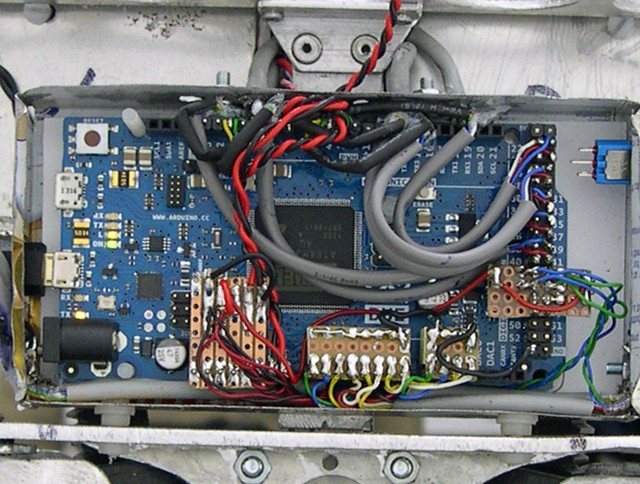
08/19/2014 at 21:40 • 0 commentsI had allowed two days to do the cabling and wiring, but in reality it took 2 weeks just for the main runs. Connections to the Arduino took a further week and although I had planned for a neat job, it never ever works out like that.
![]()
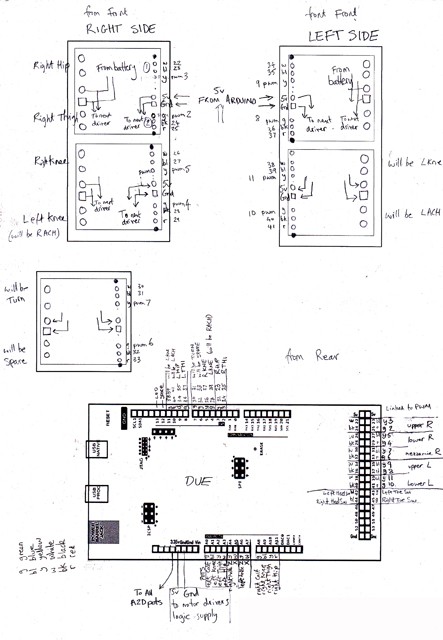
At this point I make 3 small tin-plate boxes from baby milk tins to house an Arduino Due and motor drivers. Currently the boxes are isolated from the frame but not yet grounded, so provide more physical protection than emi.
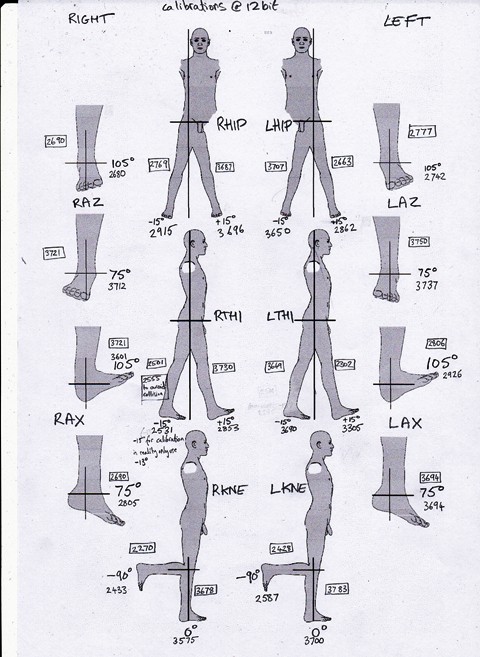
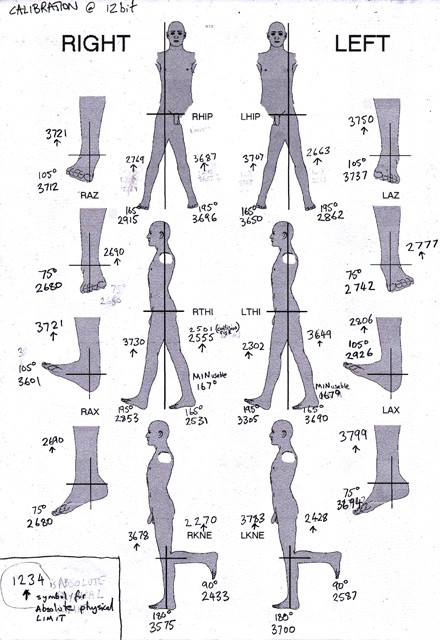
Rest of the month is spent calibrating the the pots and the joint angles they represent, end-limits etc. This all ends up on scraps of paper and eventually I need to put this all down in a form I can still understand in the future.![]()
![]()
-
June
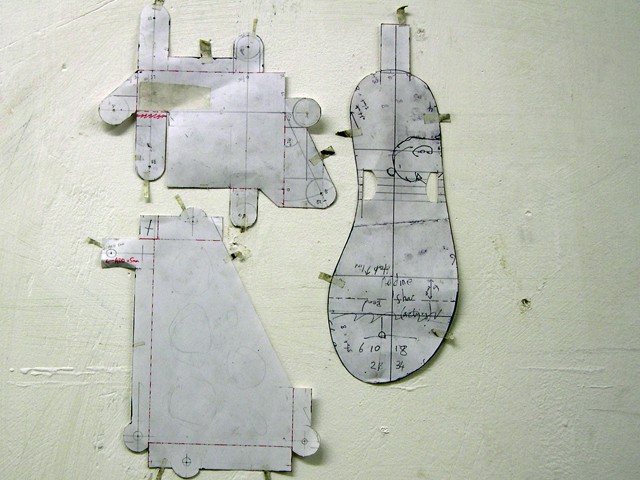
08/19/2014 at 21:29 • 0 commentsBuy a good deal of scrap aluminium for £ 25. Most of it is about 2mm thick, which is about as much as I can cut with aviation snips. I use the scaled up picture for measurements and make a lot of card test shapes till I'm happy with one and then make it in metal. Its a quick way to work but end up with a lot of subsequently scrapped versions.
![]()
![]()
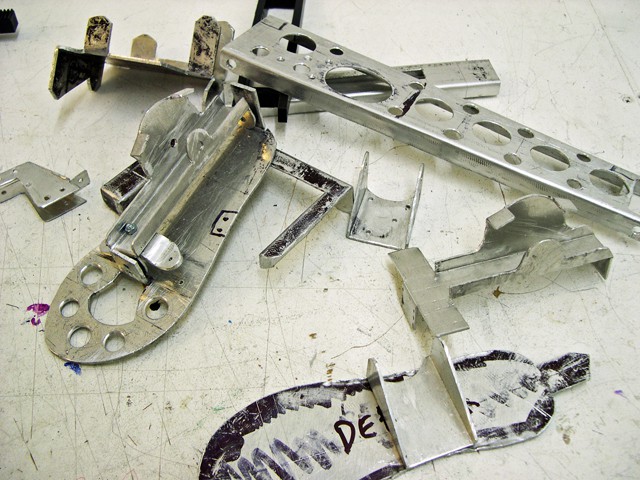
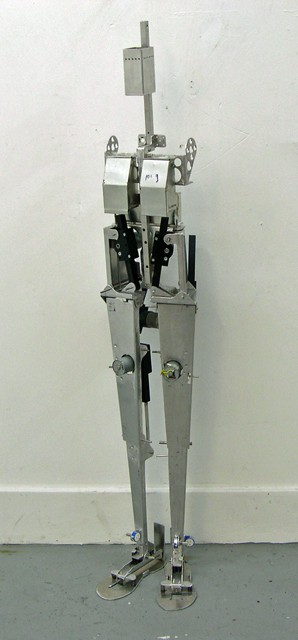
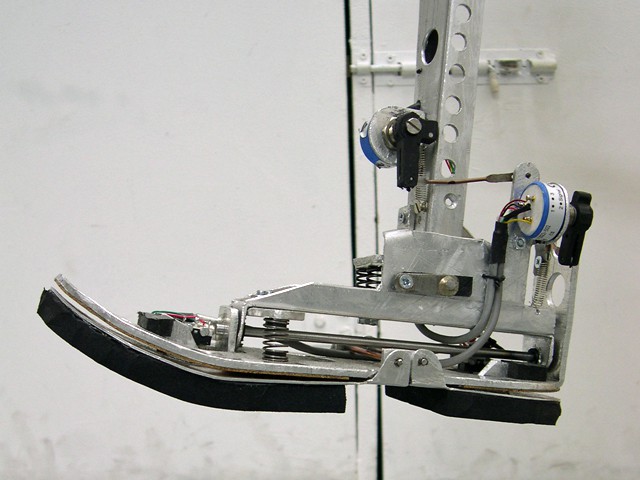
The first leg takes a few days, after 2 weeks I have most of the structure done. Although the feet turned out to be a little project in themselves.
![]()
![]()
![]()
![]()
-
May 2014
08/19/2014 at 21:08 • 0 comments![]()
I make a small image of a skeleton inside a figure and scale it up to about 4 foot tall. I also arbitrarily decide that the final weight should come in at about 5 kg. Much heavier or taller and I'm going to have difficulty physically handling it during testing, catching mid fall etc. Also taking into account the tools I have. Just the usual hand tools, bench vice and an ancient MDX 20 model making CNC machine.
![]()
Spend a week fretting over what to use for actuators. Servos that are able to suppy the torque needed, and maybe survive the inertia of the limbs, are just way way too expensive. Two of them would eat the entire budget. Linear actuators, on the other hand, look much too heavy as do all the direct acting off the shelf motor/gearbox combinations I can find.
Decide to make my own actuators. Rack and pinion seem the simplest, lightest and easiest type to make. Bought some smallish 37mm general purpose motors/gearbox from Pololu , and some nylon racking and pinions, and also some delrin sheet to mill out to hold to parts together.
The MDX 20 is not a fast machine, but over the course of a week it stoically machines 6 gearboxes, as well as a batch of bushes I'll use as pivot bearings and some horns for the pots.![]()
![]()