 Sepio
SepioThe Nextion was fitted in the base cover. This way it wasn't easy to read and it was also dangerous to operate.
After a question of Olaf I tried to tilt the display on the base plate. But that wasn't working because the robot arm could collide with it.
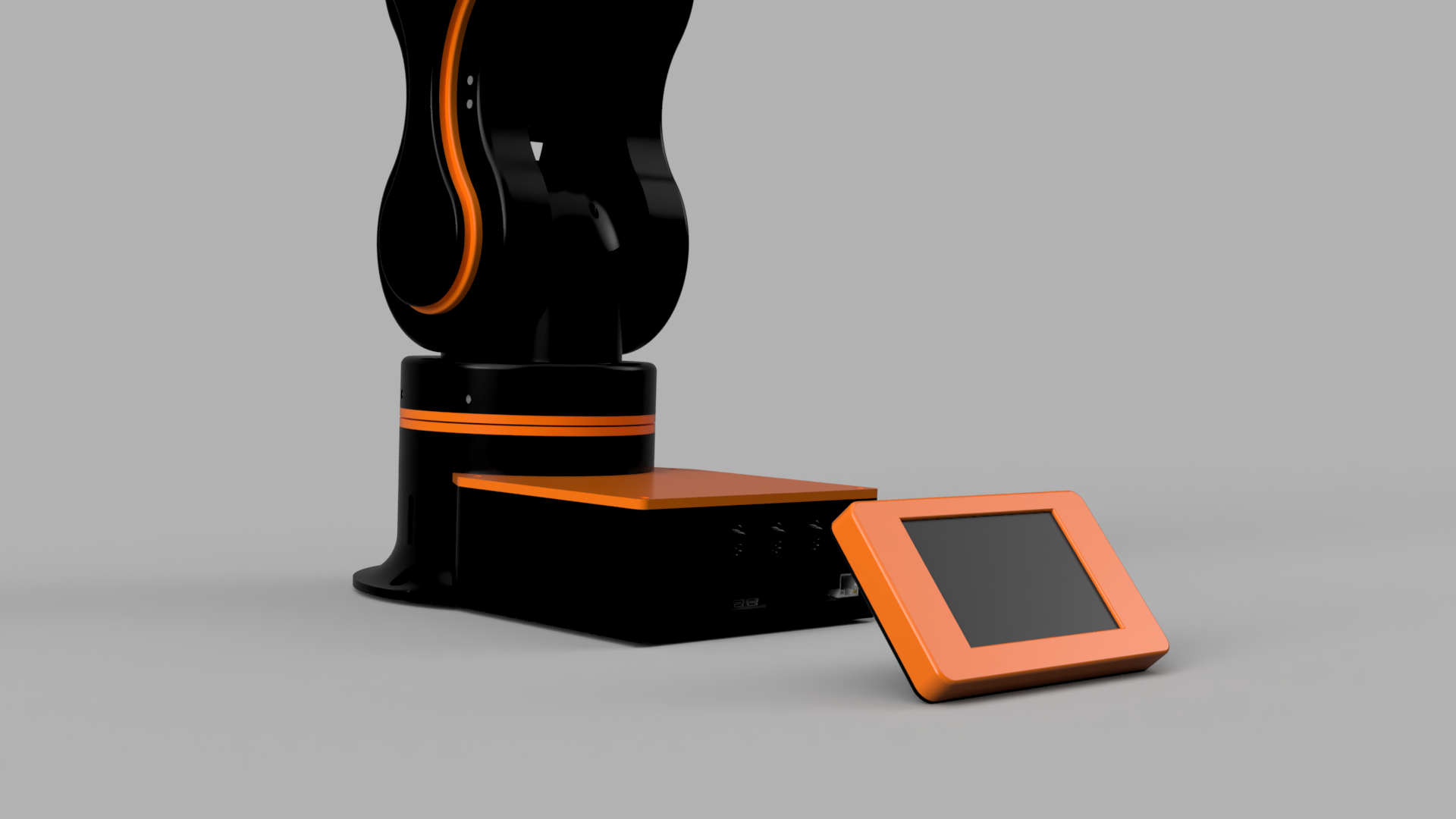
So I removed it from the base and made it like a tablet on a cable. This way its easier to keep in your hands and if the cable is long enough you can stay out of reach of the robot arm. It's also easier during programming because you don't have to remove the base cover to get to the SD card of the Nextion display. As a cable you can use a cut USB cable. (You need a shielded 4 wire cable).
I am currently printing this new design. If everything fits then I will make it downloadable below.
Below a rendered preview of the new design.
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.
Interesting design. I think you could extend it so that it could be hooked at the base controller and taken off. This makes it easier to move the robot.
Interesting is that we now have a reusable display. You can use the same display for different robots.
Are you sure? yes | no