shamylmansoor
shamylmansoor-
Using Raspberry PI with CodiBot
02/02/2018 at 21:25 • 0 commentsFor my PyCon Pakistan talk I used a Raspberry PI to control CodiBot using Python. Adding a couple of videos here.
-
Base Design
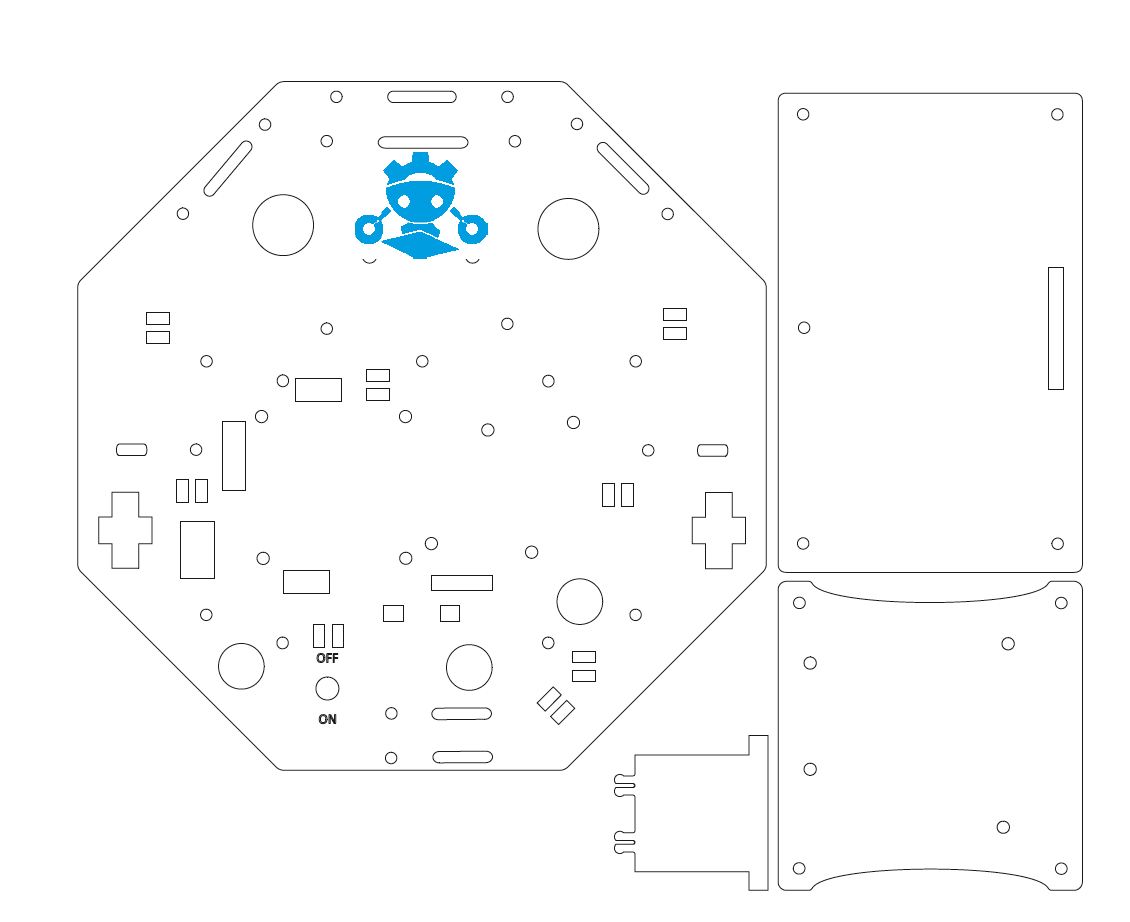
10/20/2017 at 21:31 • 0 commentsAs discussed in one of the previous logs, it took a lot of discussions and revisions to get a design that could help us put many sensors on it. We ended up with an octagon as it gave us the closest shape to a circle but with eight sides to put eight different components or sensors on. The base is designed to be laser cut in acrylic with a LearnOBots logo at the top side.
![]()
The other two plates are used for battery and arduino mount. The bigger rectangular plate is connected to the bottom of the plate using spacers which houses the re-chargeable battery. While the smaller squarish plate is mounted on top of the octagon base plate on which the Arduino is mounted. Beneath this plate, on the base, the H-bridge, the power rail PCB and the Fire fighting / Object retrieval PCBs are also mounted.
![]()
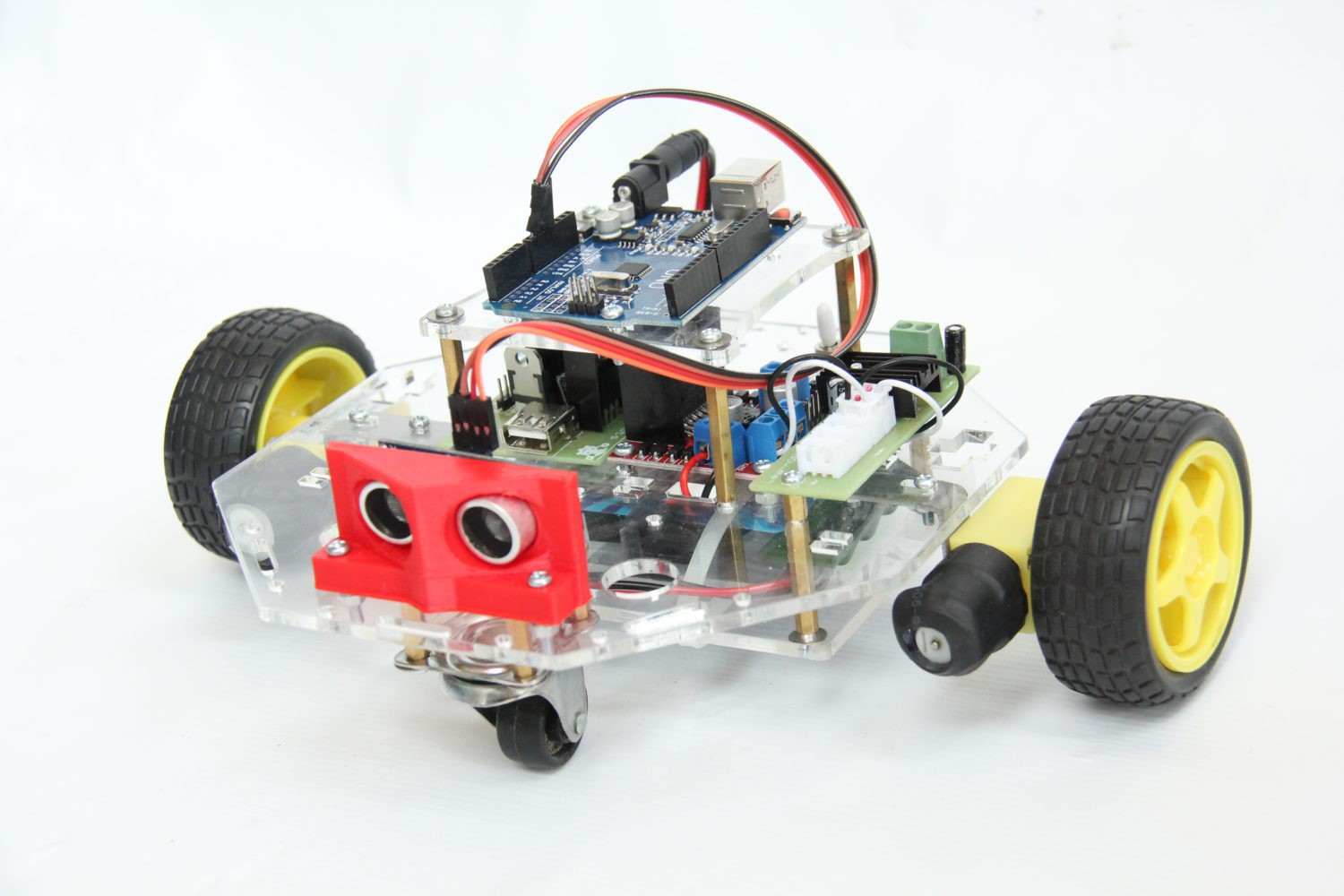
In the image above you can see two plates, one above the base and one below mounted using metal spacers and M3 screws. In the design file we can also see a number of different holes. Some big circular ones and some smaller ones. The smaller ones are for mounting different kinds of modules using spacers and screws. The larger ones are for routing wires from different modules towards the battery back.
The base has also been designed for mounting the MeArm for one of the activities. It allows Codi to have an Acrylic version of MeArm to be mounted at the front for different activities like object retrieval and manipulation. Since the MeArm uses around 4 servo motors, we already have a power distribution board and servo connection board to connect a MeArm to the Arduino Uno of Codi.
-
Developing the Content
10/16/2017 at 12:47 • 0 commentsCodiBot is supposed to be a fun, easy and affordable robot for kids to learn coding, robotics, electronics and problem solving. Just by hooking up an Arduino with a few motors does not really satisfy the goals of this project. Therefore one of the major tasks of this is to create creative content around the Bot that enables children to keep on learning with the kit. With our team's experience of developing curriculum based on thematic project based learning we have developed a few activities. These include
- Fire Fighting Codi
- Astronaut Codi
- Obstacle Avoidance Codi
- Line Follower Codi
In our sessions the children our given different missions around which they have to program Codi and solve the mission. For example in one of the first missions they learn to program Codi by blinking an LED. They just don't blink it they have to program a message which is then read by another robot. The following video shows the activity
https://www.facebook.com/learnobots/videos/539522286241226/
In another session the children are given a mission to find Water on the surface of MARS. The following two videos are used in the session.
https://www.facebook.com/learnobots/videos/409817935878329/
![]()
We have also developed a number of downloadable tutorials that the kids can follow at home. There is more content that we plan to develop around CodiBot including YouTube videos as well as downloadable content and programs.
-
Selecting the Base Shape
10/16/2017 at 12:29 • 0 commentsAlthough it seems pretty trivial decision, however while deciding on the shape of our robot we had plenty of discussions within the team. We experimented with different shapes and decided on the octagon. Here is an explanation as to why.
When we started designing this robot, we thought about using the usual robot chassis that is available from most websites.
![]()
However we decided to design our own chassis as we wanted to build a robot that would have lots of add-ons and a number of possibilities. Just using an off the shelf chassis did not give us the freedom to design our add-ons according to how we wanted to place them on the robot.
After discussing many different designs and going through different prototypes and versions we ended up with a Octagon shape. We considered a circular chassis, a hexagon as well as the traditional shape shown in the image above. The reason for choosing an octagon shape was it gave us plenty of room to add sensor modules which are usually straight or rectangular in shape. Refer to the image with the Sonar sensor. 8 different small sides gave us 8 spaces to mount sensors that needed to be at the boundary of the base plate (the chassis). For this reason we did not use the existing chassis shape as well as the circular shape.
![]()
-
Developing different components
10/16/2017 at 12:09 • 0 commentsSince the goal of this project is to teach kids in the domains of STEAM (Science, Technology, Engineering, Arts & Mathematics) we have spent considerable time in developing different activities for kids. These include,
- Obstacle Avoidance Codi
- Maze Navigating Codi
- Delivery Bot Codi
- FireBot Codi
- Astronaut Codi
- App Controlled Codi
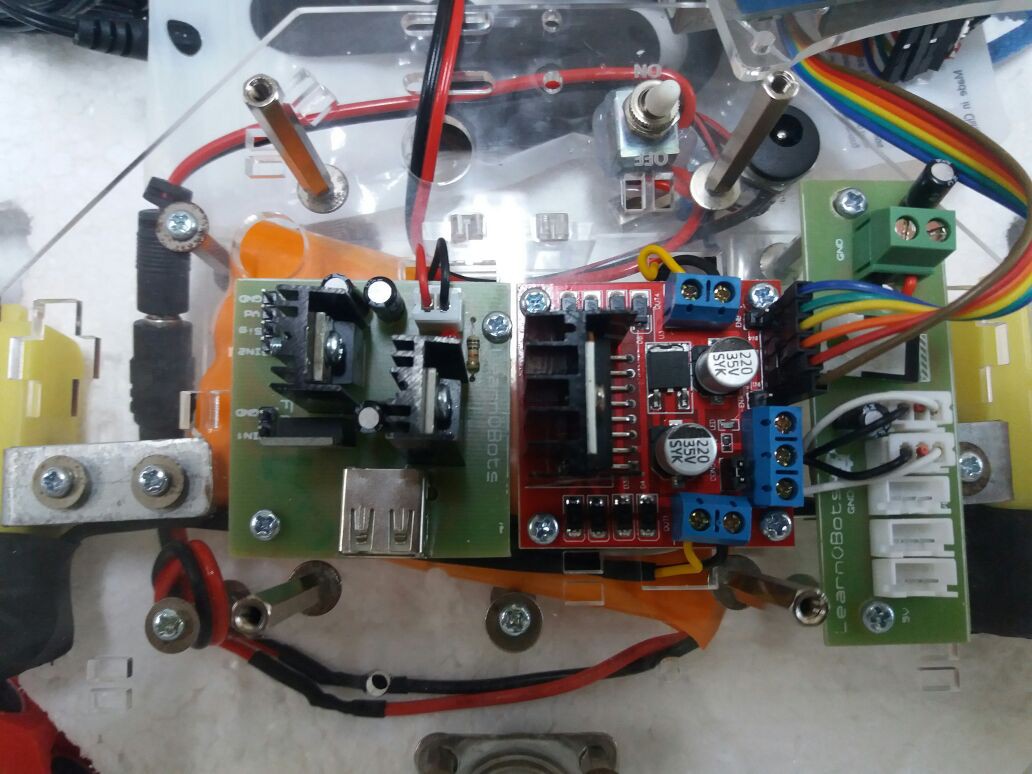
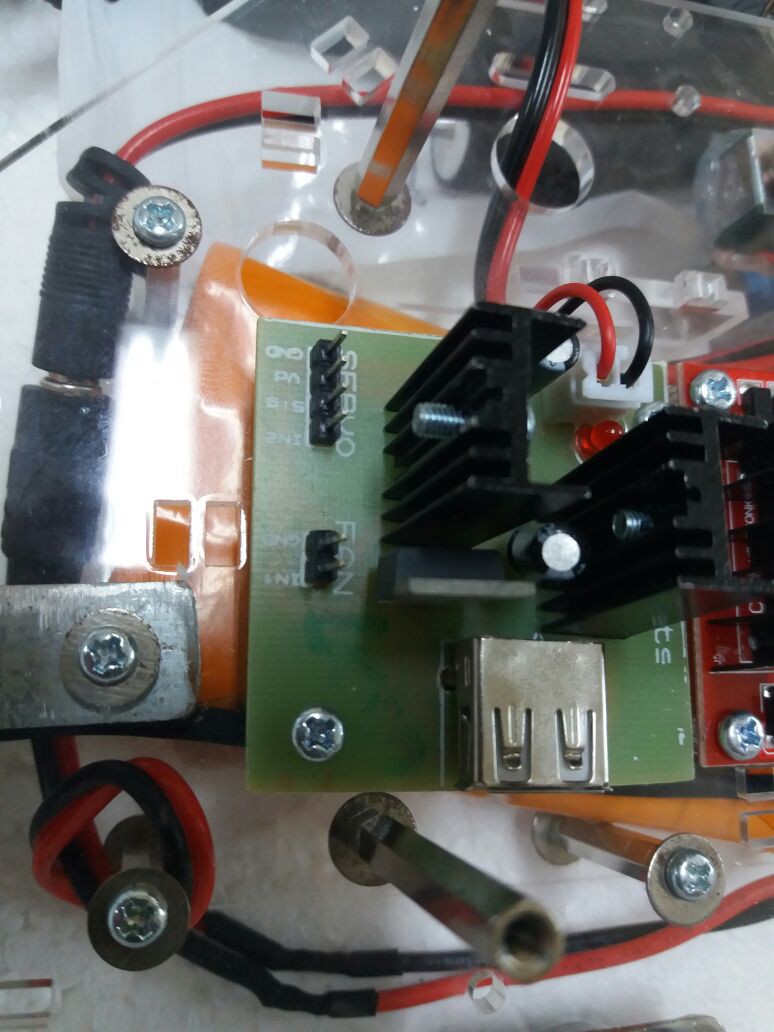
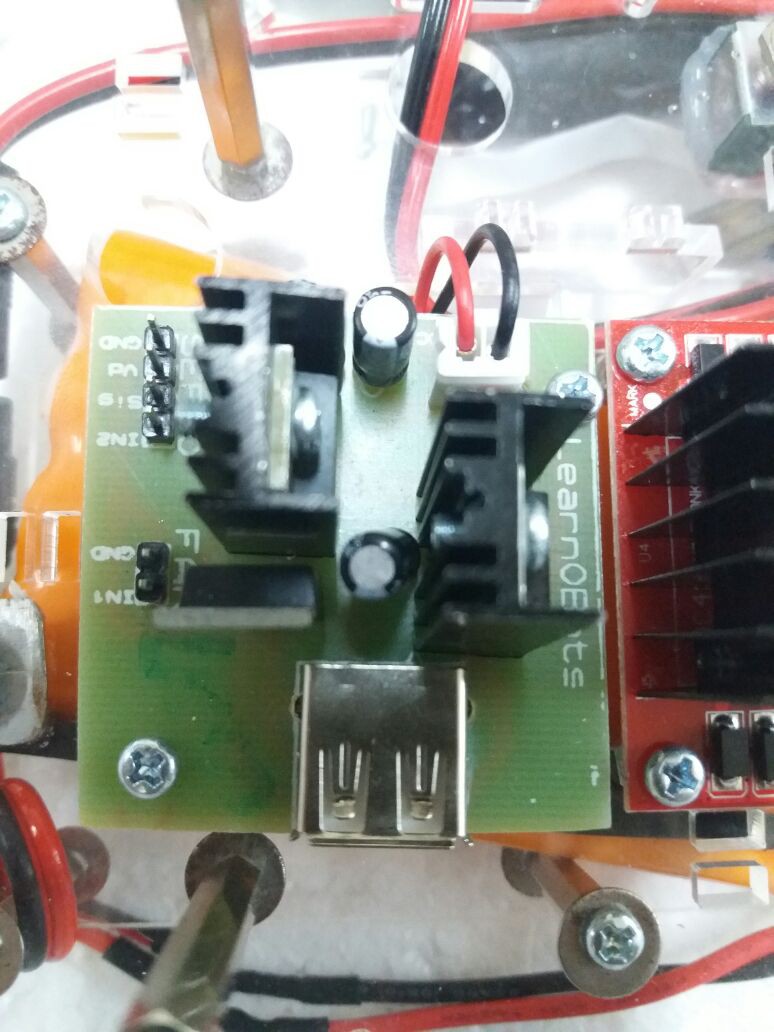
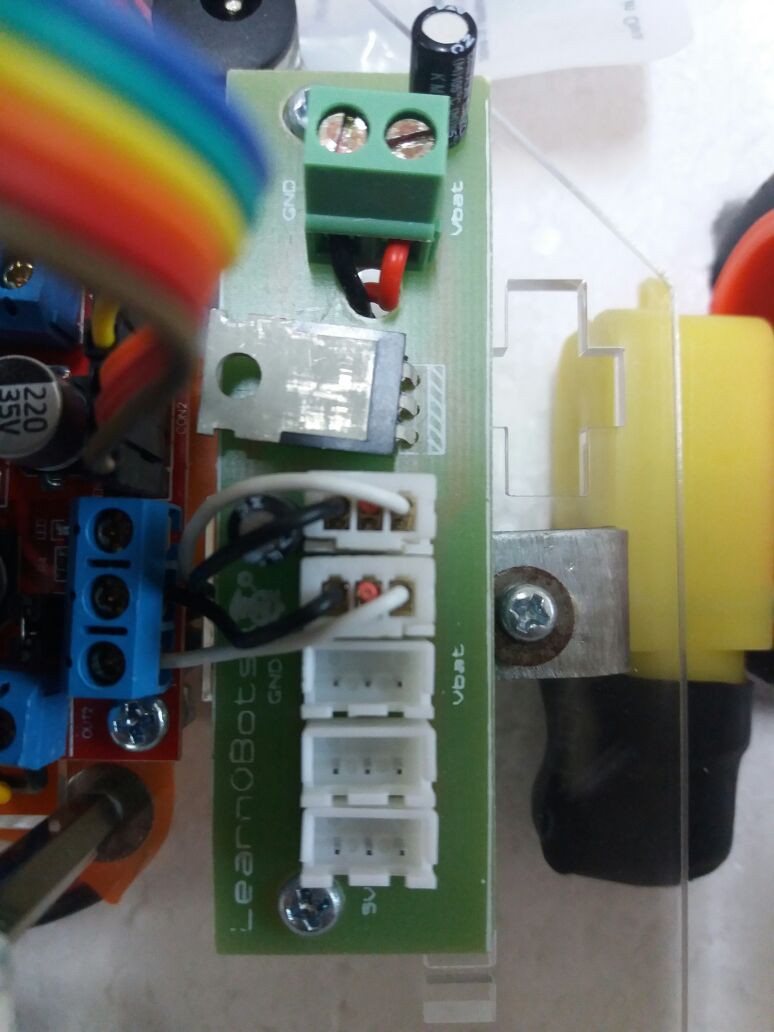
Each kind of robot uses a different kind of sensor. The idea is to use theme based learning instead of just simply interfacing sensors. In order for all of these different sensors to be used with Arduino (which is Codi's main controller right now), we needed to develop a few small circuits of our own.
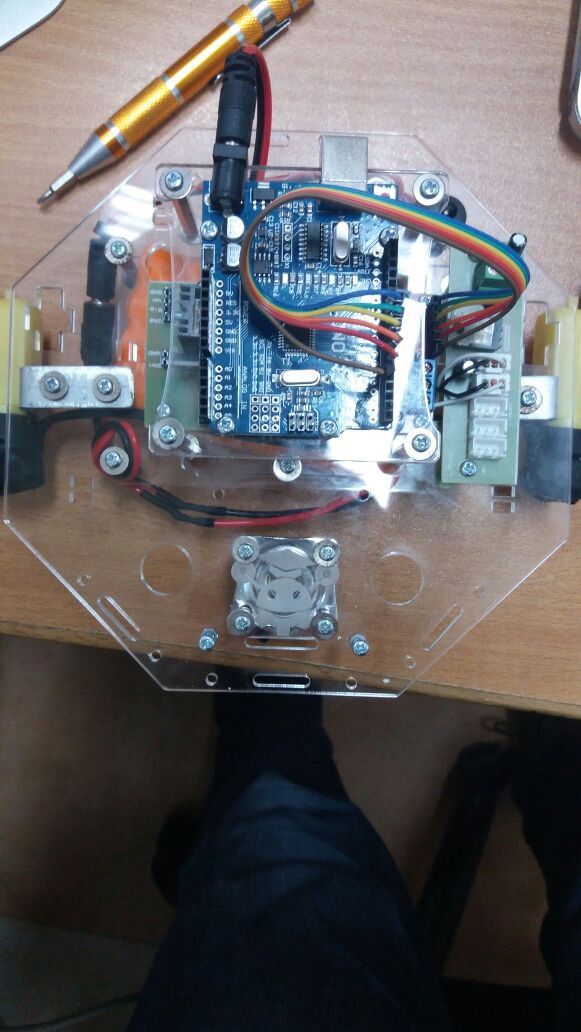
These include- A power distribution circuit to provide power to different circuits
- A power circuit to connect the FAN for FireBot Codi, Servos for the Robotic Arm extension
The circuits can be seen in the following images. Please keep in mind that we are trying to save costs, so the PCBs are simple and made using a local supplier.
![]()
![]()
![]()
![]()
So instead of just developing a completely new board that would include this functionality we have developed smaller cheaper components that simple connect with the power and the Arduino interface keeping the costs down.
-
Designing CodiBot I
09/06/2017 at 17:47 • 0 commentsWe're trying to bring down the cost, but please do keep in mind, that we are a very small company usually focusing on teaching kids coding, electronics, robotics, 3d modelling and printing, IoT, mostly STEAM subjects. We have a very limited budget. Since most of the kits like Legos and Mbot cost us quite a bit if we imported them in Pakistan, we designed our own. We started off with an open source 3d printed robot and eventually designed our own as this design had limitations. This is based on our own chassis design and not the usual chassis that one can buy off Chinese websites. There are small circuits (power distribution, servo control etc) that we've designed too, to make it user friendly (just connect a few wires for extra sensors / actuators), although we do believe there is still a long way to go! Next step is to design a custom Arduino controller to include all the necessary controllers keeping the cost low again.
Also we are designing some cool tutorials to go along (included in the cost) which are based on themes (Fire Fighting Bot, Astronaut Bot, Delivery Bot etc.). We've learned that kids like stories and programming a robot to solve a challenge within a story keeps them engaged. You can check out our activities as well as Codi in use on (www.facebook.com/learnobots).