0%
0%
Swiss Army Arm
A multi-tool tool holder for amputees
 Dante Kienigiel
Dante KienigielBecome a Hackaday.io member
Already have an account? Log in.
Just one more thing
To make the experience fit your profile, pick a username and tell us what interests you.
Pick an awesome username
hackaday.io/
Your profile's URL: hackaday.io/username. Max 25 alphanumeric characters.
Pick a few interests
Projects that share your interests
People that share your interests
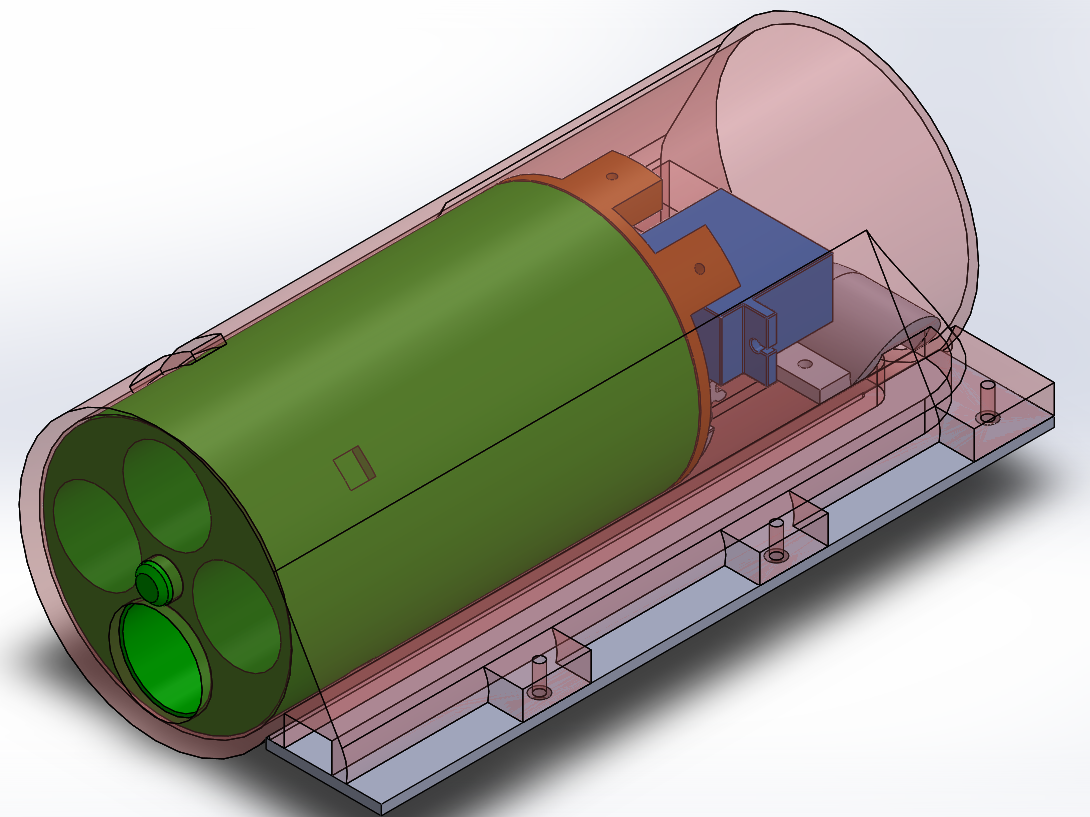 Here's one of the attempts at doing this, note the chain storage part running down the side of the arm
Here's one of the attempts at doing this, note the chain storage part running down the side of the arm But I didn't want to risk pumping fluid into the machinery or having to mess around with a pump, plus materials and assembling would have been difficult.
But I didn't want to risk pumping fluid into the machinery or having to mess around with a pump, plus materials and assembling would have been difficult.
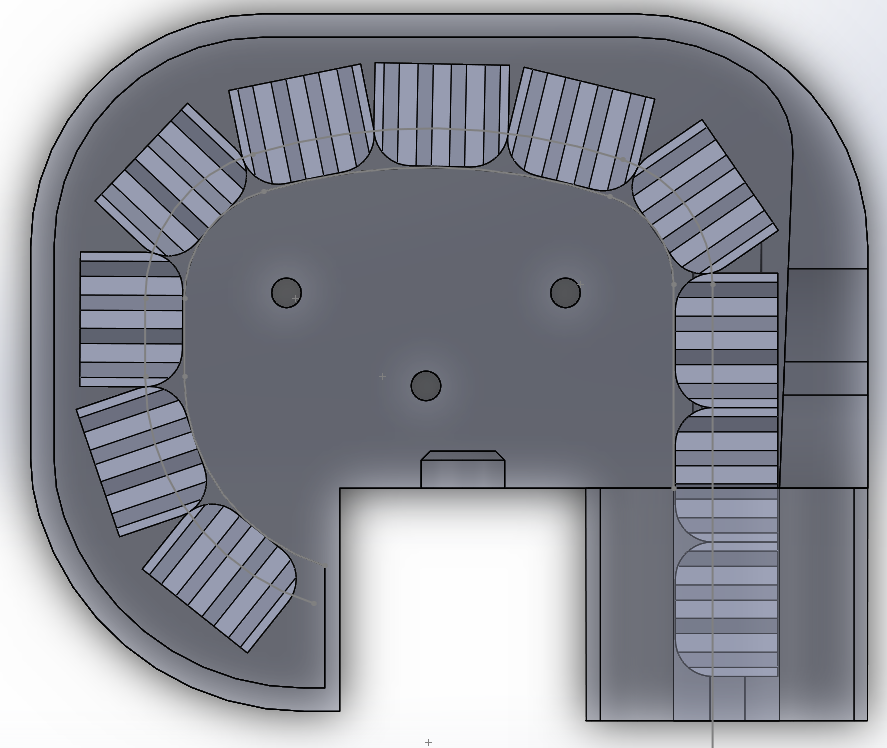 Chain retracted
Chain retracted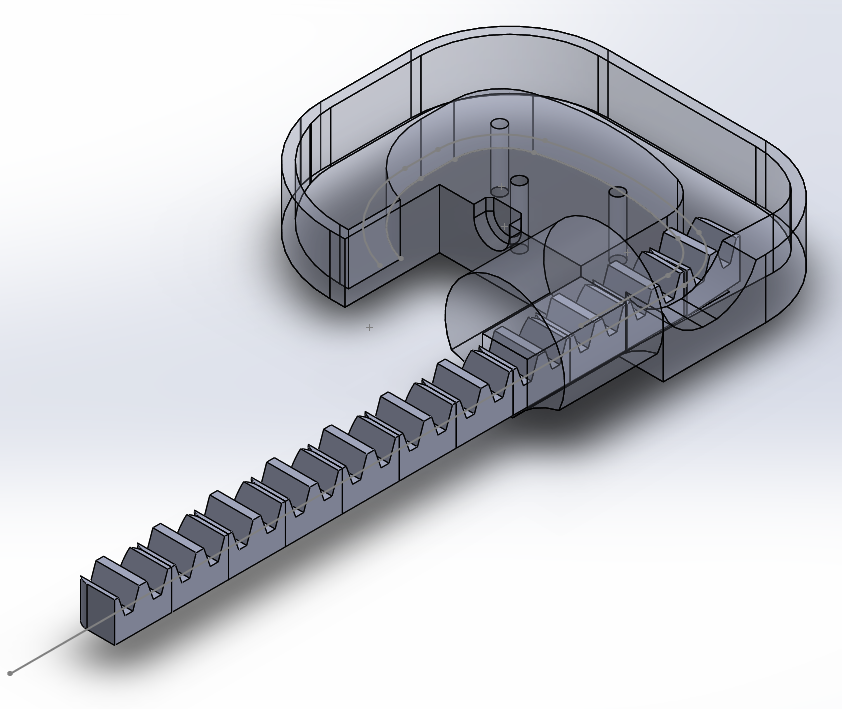 Chain extended
Chain extended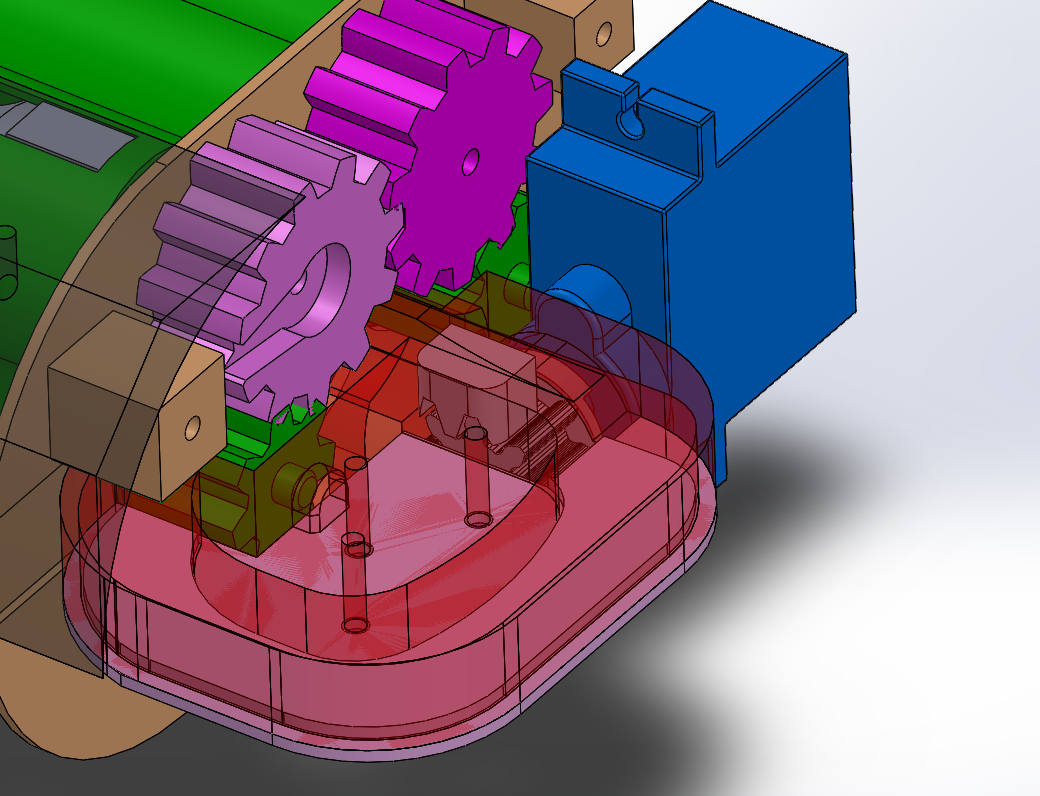 Servo and gear used to move the chain
Servo and gear used to move the chain

This is really cool. Still I wonder if a less cool approach would be more practical.
I wonder if a purely mechanical solution would be better. You can push buttons by pressing against the hip or hooking at your belt. You could even have something at the belt that helps with that.
Did you have a look at the through-the-front switch blade mechanism. It requires very little mechanical work. May be instead of a single button you could have a ring that actuates only one tool depending on the rotation.