llo
lloUn robot modulaire : je compte faire un robot capable de se satisfaire de changements assez importants, en particulier au niveau de ses moteurs. Je veux qu'il soit possible de débrancher un moteur, le remplacer par un autre, et que le robot s'y adapte et continue de fonctionner.
Pourquoi ?
- Pour pouvoir évoluer en fonction de la technologie, qui continue de progresser (moteurs plus légers, moins gourmands, plus puissants).
- Pour pouvoir se dépanner sans qu'il soit nécessaire de retourner dans le code et de tout reconstruire.
Dans le même ordre d'idée, je travaille sur des articulations et des supports de moteurs capables de se remplacer sans la moindre difficulté, ni même sans qu'une intervention humaine soit nécessaire. Même chose pour la source d'énergie : je veux que mon robot soit capable de gérer son alimentation tout seul, de se recharger, de s'économiser de façon instinctive.
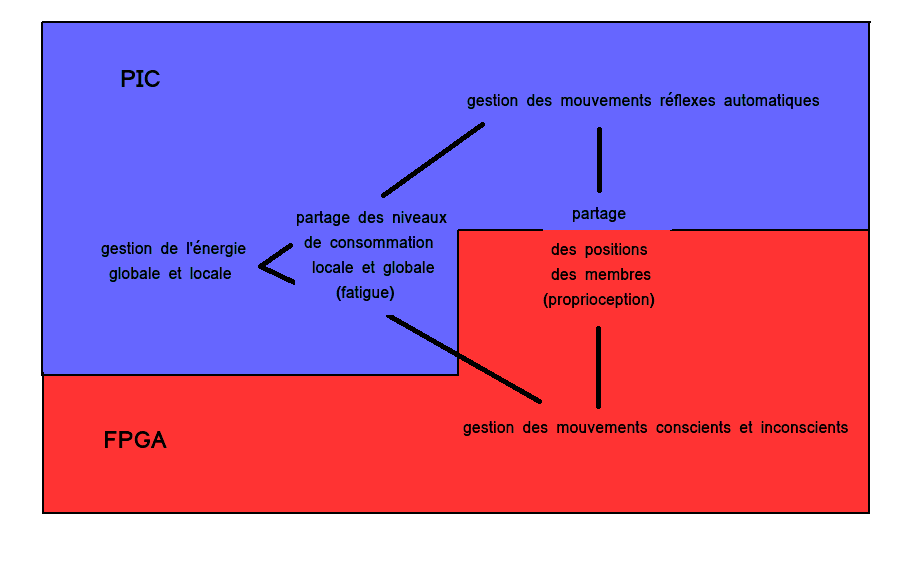
Un robot instinctif :
Loin de la tendance du tout en un seul gros bloc de code, je travaille sur une structure en toile d'araignée qui permette au robot de travailler sur d'innombrables fronts en même temps. C'est particulièrement vrai pour la gestion des moteurs, qui sera entièrement auxiliaire, avec une intervention possible depuis l'extérieur, mais guidée et hébergée à l'intérieur d'un contrôle involontaire solide.
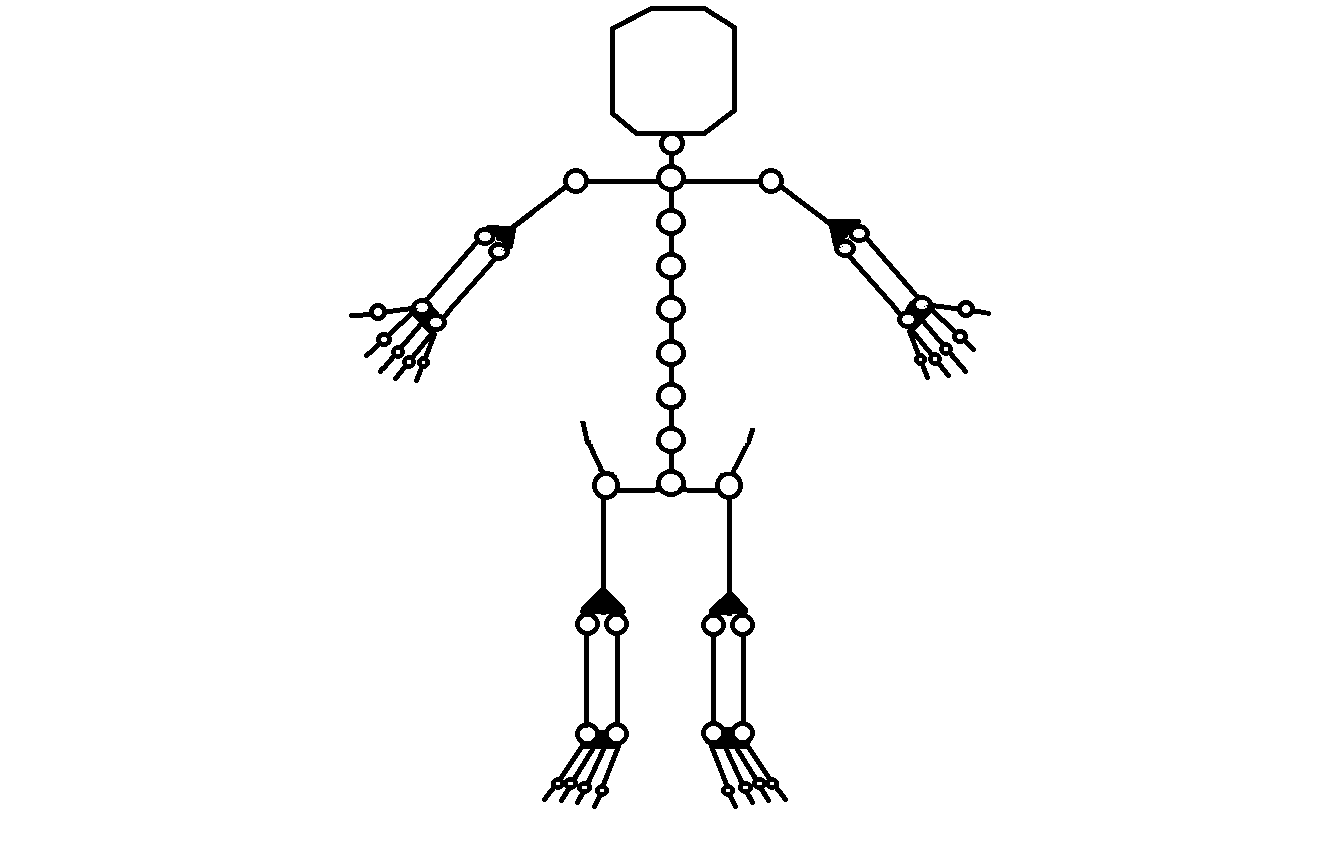
Un robot inspiré et inspirant à la biologie :
D'une façon générale, ce robot est depuis le départ guidé par mon amour de l'étude du vivant, et je compte non seulement m'inspirer de ses règles et pratiques, mais aussi qu'il aide à sa compréhension en retour.