 Sergei V. Bogdanov
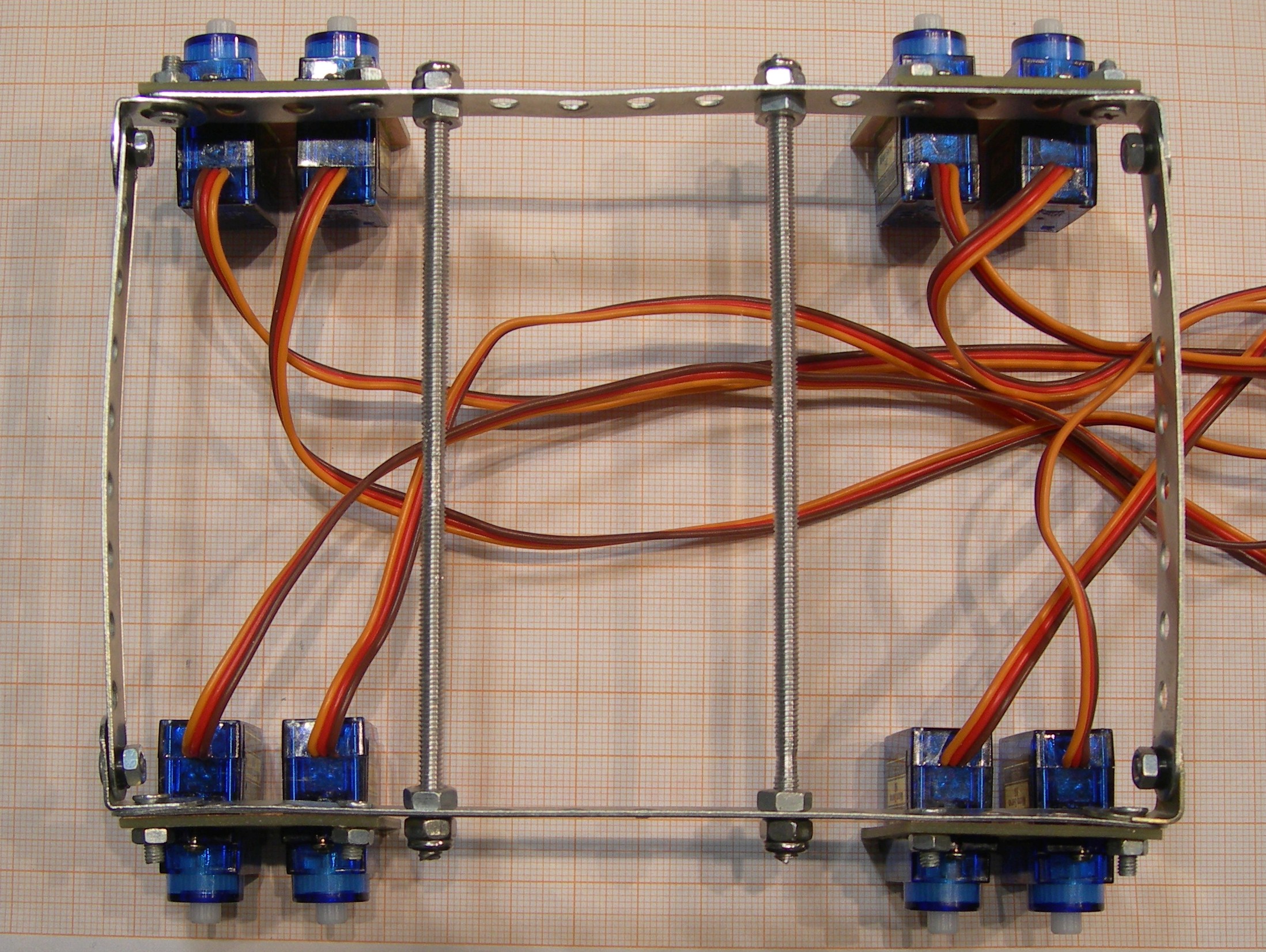
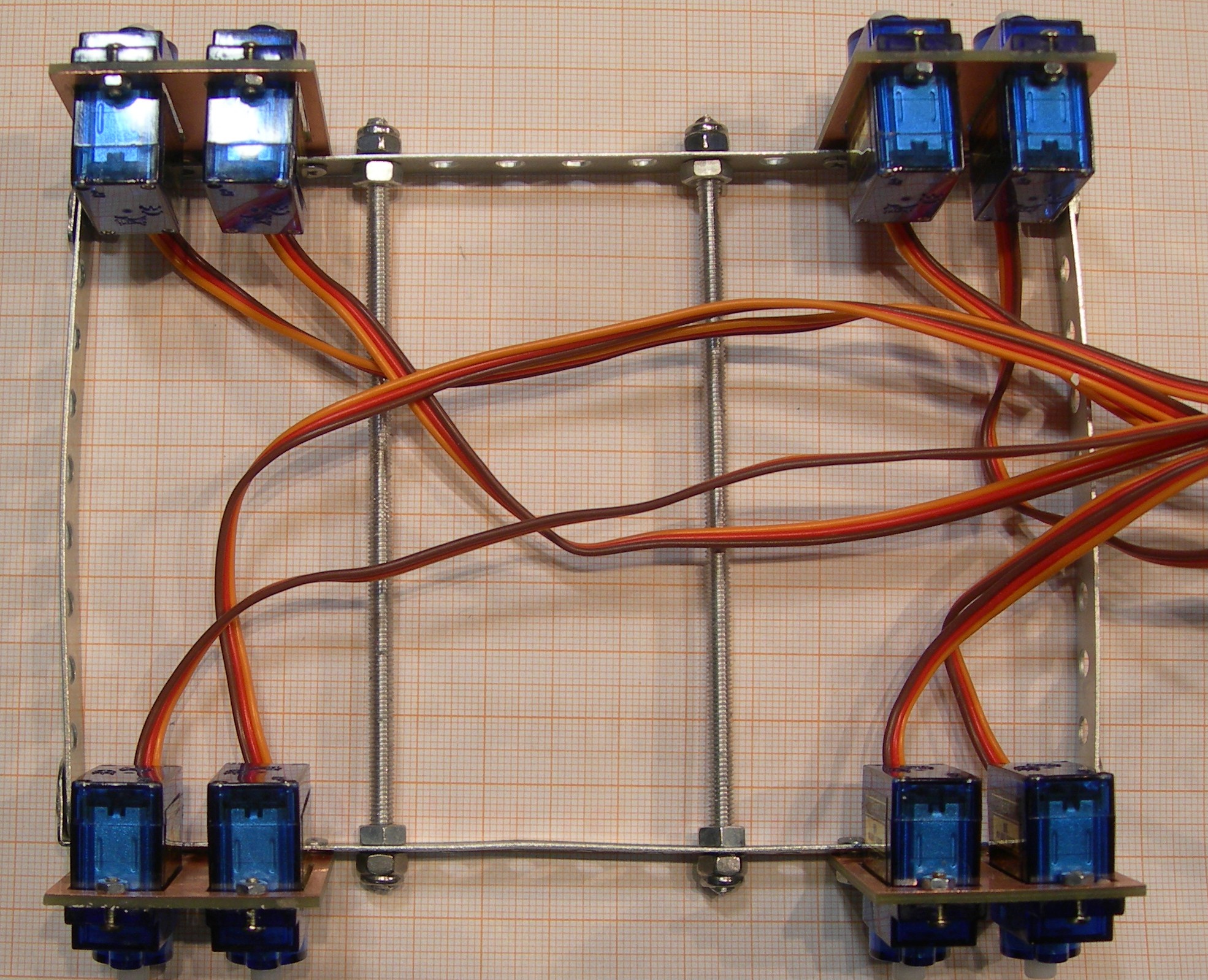
Sergei V. BogdanovWe use 8 Tower S90 g servos, Servo Holders and metal construction set. We connect it together in a base. Bottom, profile and face views

A project log for RoboAmbler Walking Base
RoboAmbler is simpe open source stepping quadruped Robot walking base with 5-bar linkages
We use 8 Tower S90 g servos, Servo Holders and metal construction set. We connect it together in a base. Bottom, profile and face views
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.