0%
0%
RPM9001 - Rapid Prototyping Machine
CNC machine with swapable tool heads for rapid prototyping, built as inexpensive as possible.
Become a Hackaday.io member
Already have an account? Log in.
Just one more thing
To make the experience fit your profile, pick a username and tell us what interests you.
Pick an awesome username
hackaday.io/
Your profile's URL: hackaday.io/username. Max 25 alphanumeric characters.
Pick a few interests
Projects that share your interests
People that share your interests



 One of my stepper drivers was dead on arrival!
One of my stepper drivers was dead on arrival!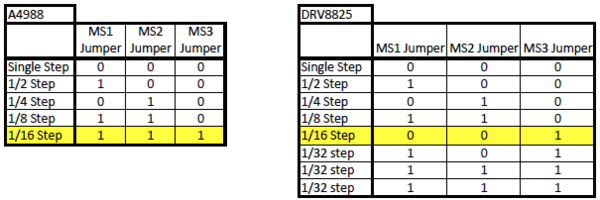 When I looked up the jumpers on a Ramps 1.4 board I found the table on the right, without the "DRV8825" label and assumed this was correct for all stepper drivers. Moral of this lection? Don't assume stuff and double check your sources...
When I looked up the jumpers on a Ramps 1.4 board I found the table on the right, without the "DRV8825" label and assumed this was correct for all stepper drivers. Moral of this lection? Don't assume stuff and double check your sources...




 Giovanni
Giovanni
 zakqwy
zakqwy
 rkramer
rkramer
 Nikolai Ovesen
Nikolai Ovesen