0%
0%
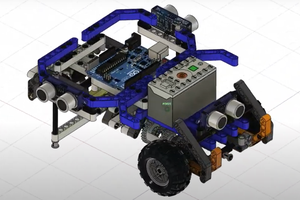
MEGA BREAD Series Number 7 - Hank The HexaPod
Starting with input for GPS destination, airlift the HexaPod, drop off at location, target termination, and recovery by the same Hexacopter
 [SF] Pigeon Kicker -- AkA James Ryan
[SF] Pigeon Kicker -- AkA James RyanBecome a Hackaday.io member
Already have an account? Log in.
Just one more thing
To make the experience fit your profile, pick a username and tell us what interests you.
Pick an awesome username
hackaday.io/
Your profile's URL: hackaday.io/username. Max 25 alphanumeric characters.
Pick a few interests
Projects that share your interests
People that share your interests
 M. Bindhammer
M. Bindhammer

 Aidan Leitch
Aidan Leitch