0%
0%
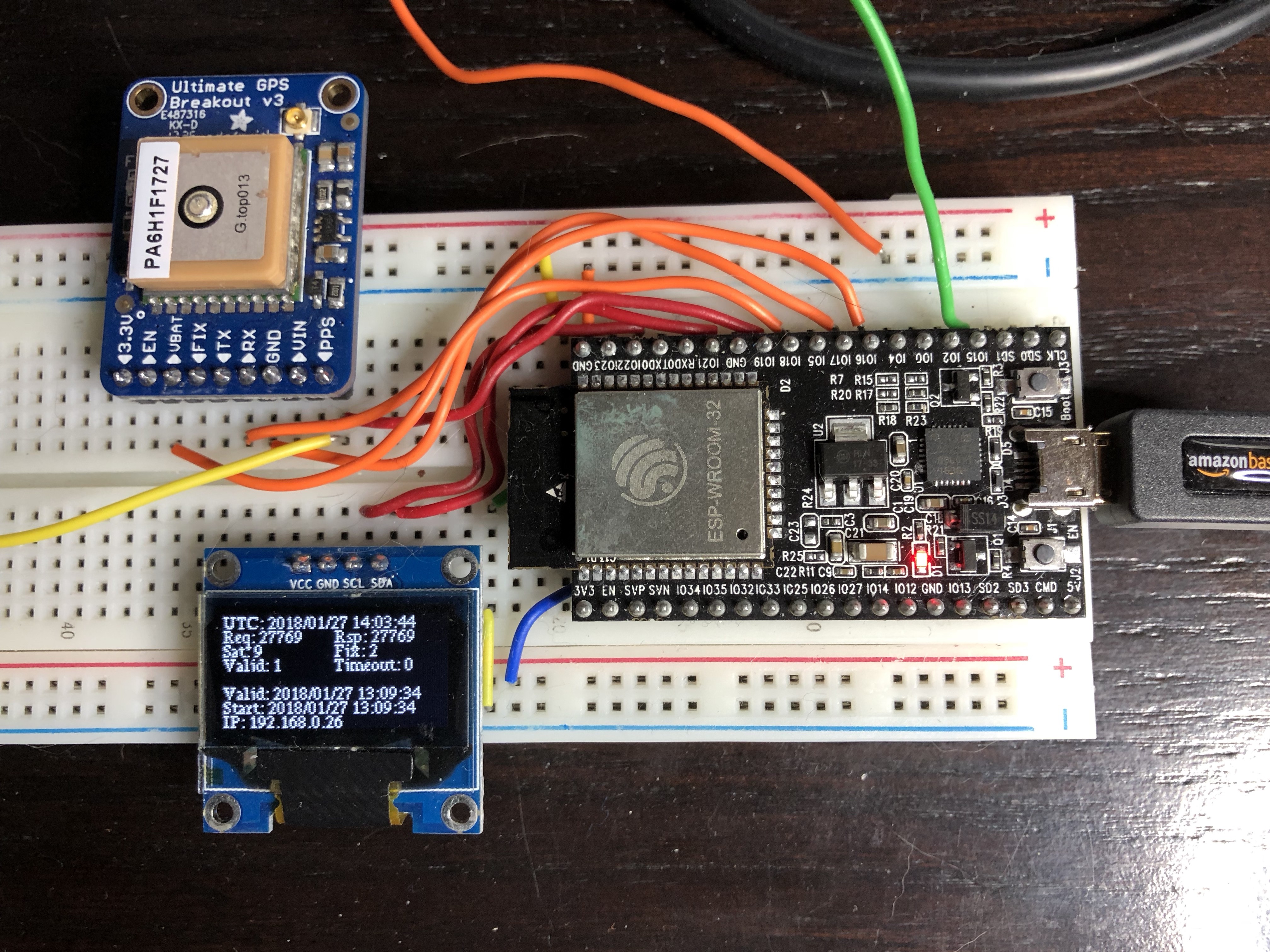
ESP GPS NTP Server
A simple NTP server using GPS
 liebman
liebmanBecome a Hackaday.io member
Already have an account? Log in.
Just one more thing
To make the experience fit your profile, pick a username and tell us what interests you.
Pick an awesome username
hackaday.io/
Your profile's URL: hackaday.io/username. Max 25 alphanumeric characters.
Pick a few interests
Projects that share your interests
People that share your interests


 Thorsten von Eicken
Thorsten von Eicken

 K.C. Lee
K.C. Lee
 Stephen Holdaway
Stephen Holdaway
Instead of attempting to sync to the exact time "right now", consider changing the rate of your local clock so it tracks the rate of the reference (this is how NTP works). Then you can set the local epoch to match the reference, and Bob's your uncle. Whenever your local time runs fast, don't jam the time back, slow the rate, etc.