codersilver
codersilver-
Radio Control System
11/29/2017 at 21:16 • 0 commentsOne of the requirements of this project was the ability to control from a long distance (about 1 km). For this purpose, the following configuration of the transmitter and receiver was used:
-
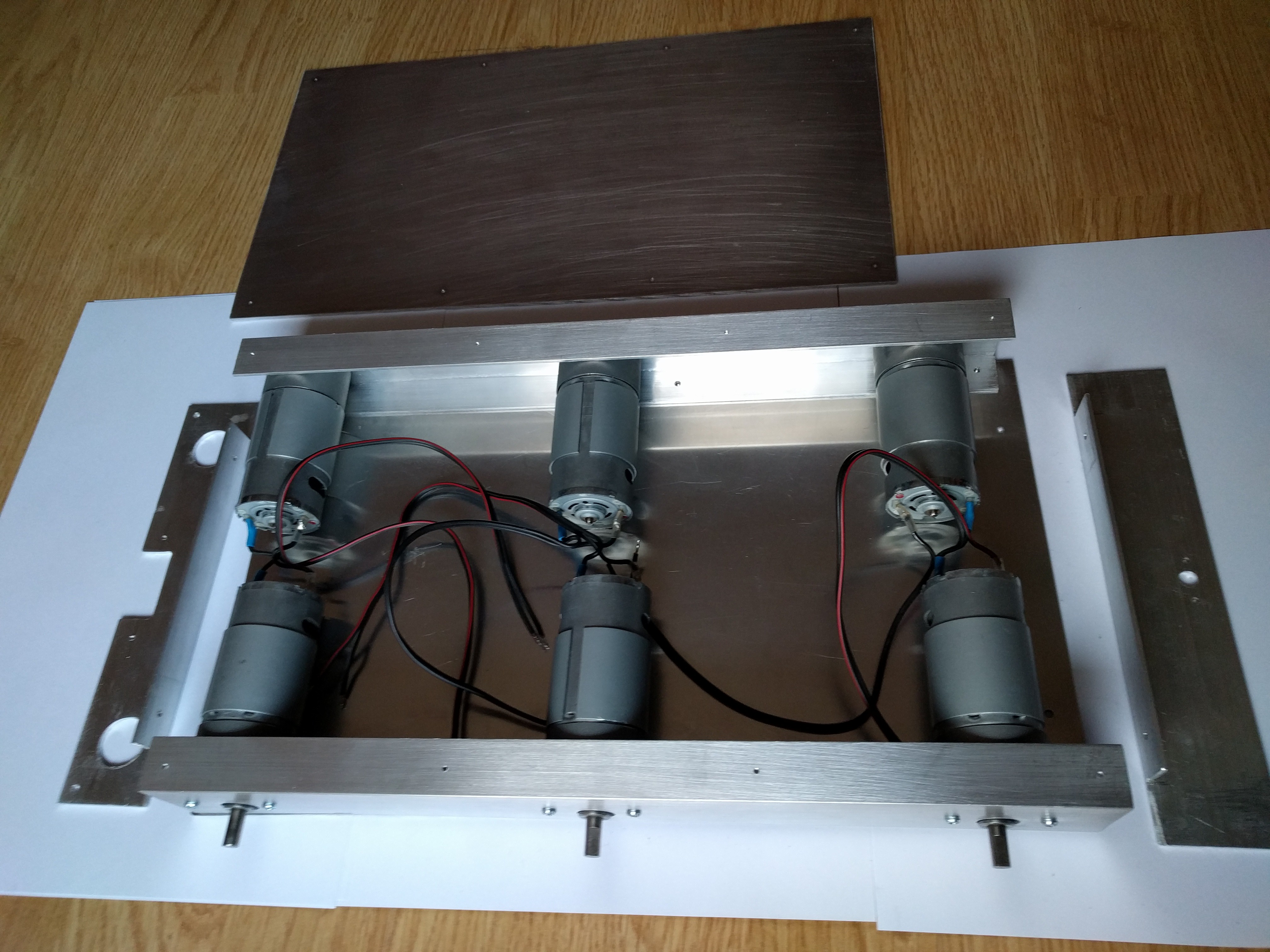
Drive and control
11/16/2017 at 22:31 • 0 commentsThe robot has been designed to be able to carry a load at least a dozen kilos. For this purpose, I used 6 high-power 12 V brushed DC motors (180 RPM, 27 kg-cm) with metal gearbox. These motors are controlled from six VNH2SP30 Single Motor Drivers that operate from 5.5 to 16 V and can deliver a continuous 14 A (and 30 A peak) per motor.
-
Mechanical parts
11/16/2017 at 22:01 • 0 commentsChassis of the robot is made entirely from aluminum and duralumin. In this project I used 6 Monster Truck wheels with a diameter of 125 mm which makes it easy to overcome small obstacles.
![]()
![]()
6WD all terrain robot
This is ongoing project of the mobile robot that can move and collect data in rough terrain