In the software theme youll use the arduino IDE and processing, both are free and a great skill to learn.
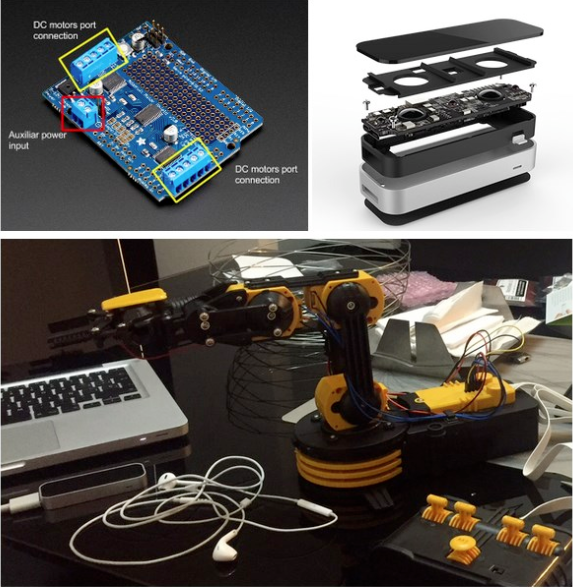
As you can see on this components list this project is very versatil and you can change the mayority of the parts and come up with a greater version. Being the ultimate the feather controlled servo based arm.... but the one that we maned works just fine.
2
Get to know the Leap Motion
Before we get cracking on the wiring and software we think thats important for you to use the Leap motion and know the advantages or the downsides from this sensor.
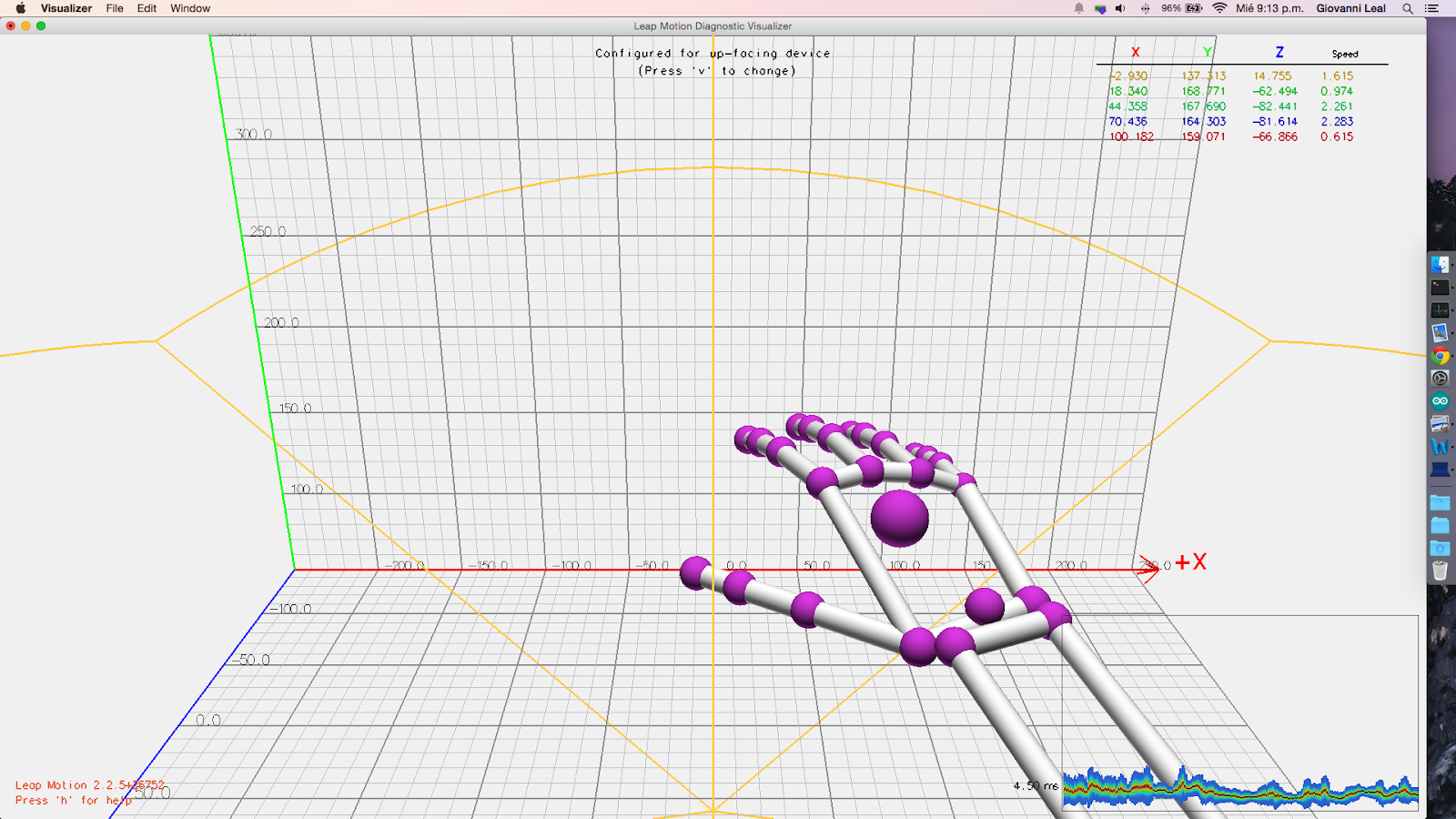
The IDE has a lot of games and such that are pretty entretaining and this visor, it shows almost all the information from position and explains to you how the Leap sees the world.
With this you will get wich is the field where it works and that superposition is a big no no on this thing.
We are sure that youll find this thing has much fun as we find and will get you a looooot of ideas.
3
Wiring
The next graph shows a big overview of how the components interact with eachother.
The PC works as an interface between the data from the LEAP and sends commands to the arduino to what to do.
As you see on the motor controller it only has 4 motor controllers so we connected 1 to 3 to the various degrees of freedom and the fourth to the gripper. The one that we choose to left out is the wirst.
Obviously it shows two arms but it works exactly the same for only one
4
The processing part
So you got everything pluged in and you are ready to code. Well we can save you a lot of time.
First download the file called brazo.pde from the files section. This program will run on your computer and youll need the processing IDE to use it so download that from here: https://processing.org/download/
This platform is huge, has a great comunity and you can learn a lot of computer vision and interface representation with it. So this is a good way to start.
The only thing to configurate in the code is in the setup this line:
myPort = new Serial(this, "/dev/tty.usbmodemfa131", 9600);
You'll need to change the port. What is this port Giovanni?
You will ask this and the answer is: Thats the port where your arduino is connected. This program triggers when you pass certain phisical barriers and sends a command directly to the arduino.
So go to the cmd and type
ls /dev/tty.*
for macs.
This will give you the port name... go ahead and replace it.
You can now run the code. It will display on when it detects a hand.
5
Arduino Part
This one is simple. You could just upload it and it would work.
However if you want you can change the speed variable with this:
int vel=0;
and this wil help you to notice wich motor goes in which dimension.
So upload it and if you did al the previous steps rigth..... it should be alive!
Remember that the processing program has to be on top of everything for it to work.
 Giovanni Leal
Giovanni Leal
 With this you will get wich is the field where it works and that superposition is a big no no on this thing.
With this you will get wich is the field where it works and that superposition is a big no no on this thing.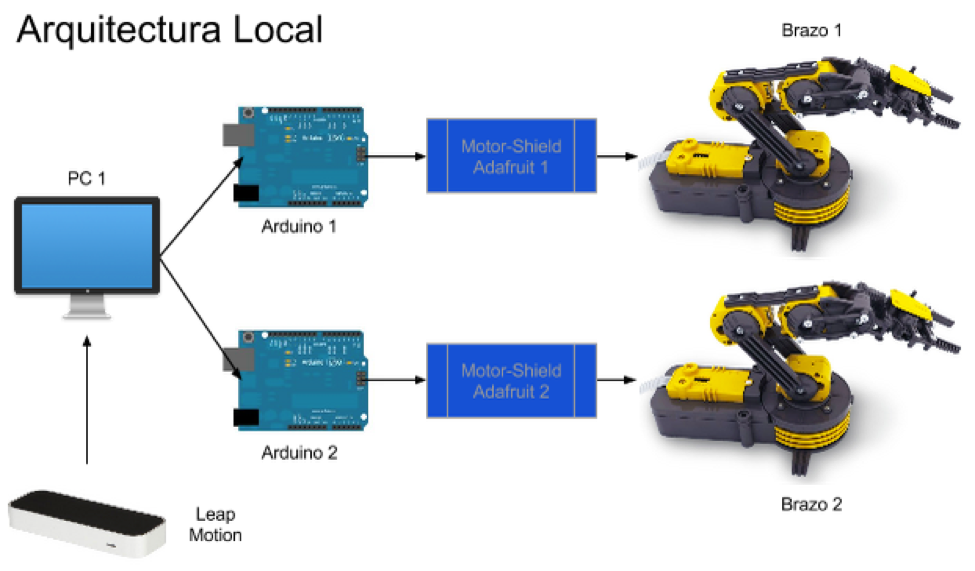
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.