0%
0%
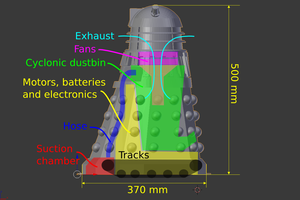
Robot vacuum -> Open platform
Development of a simple to build robot platform for experimentation with high level algorithms
 Willem Olding
Willem OldingBecome a Hackaday.io member
Already have an account? Log in.
Just one more thing
To make the experience fit your profile, pick a username and tell us what interests you.
Pick an awesome username
hackaday.io/
Your profile's URL: hackaday.io/username. Max 25 alphanumeric characters.
Pick a few interests
Projects that share your interests
People that share your interests

 witchdoc
witchdoc
 Krzysztof Pochwała
Krzysztof Pochwała
 Joshua Elsdon
Joshua Elsdon
 Shifty
Shifty
I have gone through many sites but https://vactrends.com/best-vacuums-for-pet-hair/
this site help me alot