Sarah Petkus
Sarah Petkus-
Prototyping With Algodoo
12/14/2014 at 02:31 • 0 commentsI had to wait this week for the sensors I ordered to come in the mail before I continued progress on Jelly. With Jelly on hold, I couldn't save myself from starting on yet another project idea I've had fermenting in my mind for a while now. It involves building a pair of mechanical chicken (or raptor) legs that can stride in sync with one another; both legs driven by the same moving part. The thing that initially inspired me to make a mechaChicken was this quirky and utterly gorgeous mechanical hand ostrich thing by Tim Lewis called "Pony" (that and all the stupid bipedal robotic dinosaurs that are in the stores for Christmas this season).
My problem is that I don't have a whole lot of experience with big kid mechanical motion, so it took a lot of meditating on before I even got started.
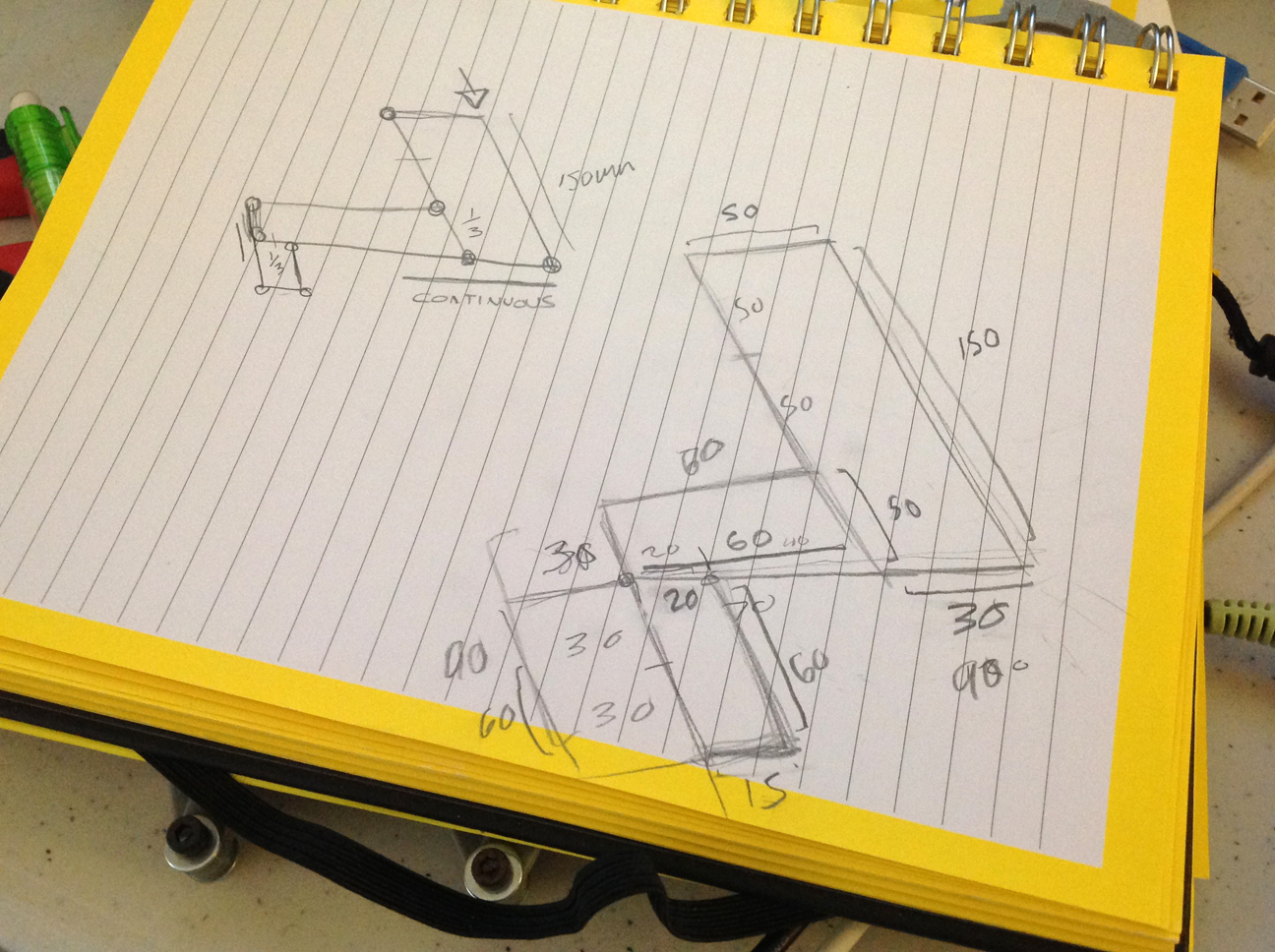
Two nights ago, I laid in bed and mused over parallelograms. When I woke up, my mind was running an animation loop that I must have seen somewhere at some point in my life. In any case I understood what sort of shape I needed to build to get the movement I wanted. So, I rushed to the closest scrap of paper and drew it before the idea escaped:
![mechafeet4]()
After I made the doodle I played geometry Sudoku with the lengths of the pieces. Once I was satisfied with my own logic, I designed the segments in CAD and printed the eight individual bits to test. I eagerly screwed them together to find that the 'mechanical leg' moved EXACTLY like I thought it should… the proportions needed to be tweaked a bit, but it worked:
![mechafeet3]()
This wasn't good enough in itself though. Now I had to figure out how to drive the leg in order to execute the motion correctly (which isn't as easy as you'd think). After spiral-graphing the top of the 'thigh' in motion by manipulating the 'foot' of the piece, I saw that the thigh tendons were arching in circles, so I knew I needed to create a wheel of some sort… which I did, but it sucked:
![mechafeet1]()
Sucky wheel sucked because I didn't take into account that the tendon piece of the leg would need to clear past the center of the hub, flush with the wheel itself. Of course, I had a screw mounting the wheel in place, so the head of that said screw got in the way… ruining my night. Easily remedied… but… Bleeeeeeeh very fussing. so much tedious.
Around now, Mark suggested that there ought to be some sort of 2D motion simulation software out there in the ether that I could use to test my ideas. I was starting to wonder that too… as I was minutes away from hopping on Little Big Planet to make use of their physics tools, tehe.
Last night, after some hunting, I found Algodoo. What a wonderful discovery… It allows you to draw out (literally) your arms, connect the joints with screws and drive them with motors, just like life but without the toil of actually building the prototype. What do I mean? I made this in about 5 minutes and it gave me the exact same feedback:
![mechafeet2]()
In my video I give a brief introduction to the software while explaining how to make my chicken leg. As of right now, I still haven't figured out what kind of motion will properly drive it, but I'm well on my way to getting there (without wasting PLA!)