deʃhipu
deʃhipu-
My First PCB
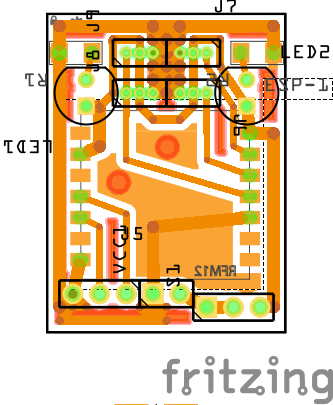
01/21/2015 at 21:00 • 0 commentsSince I had the schematic in Fritzing already, I decided to use it for a test of the printed circuit board etching process, which I wanted to learn. So I made a simple design for it:
![]()
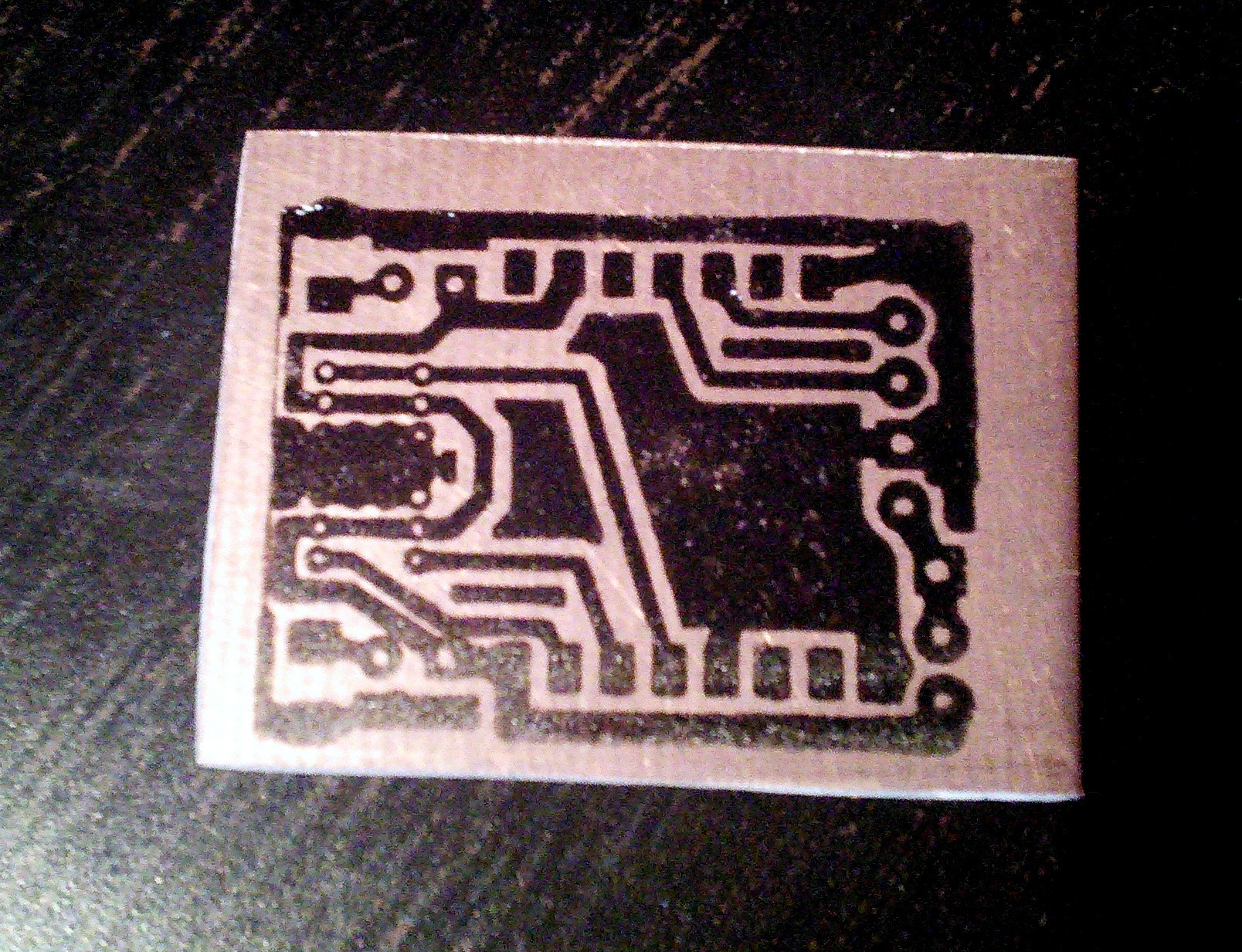
Then I printed it on a shiny calendar paper on my laser printer, and transferred the toner with an iron. Initially I made a mistake and printed it like it was, while I should have printed a mirrored version:
![]()
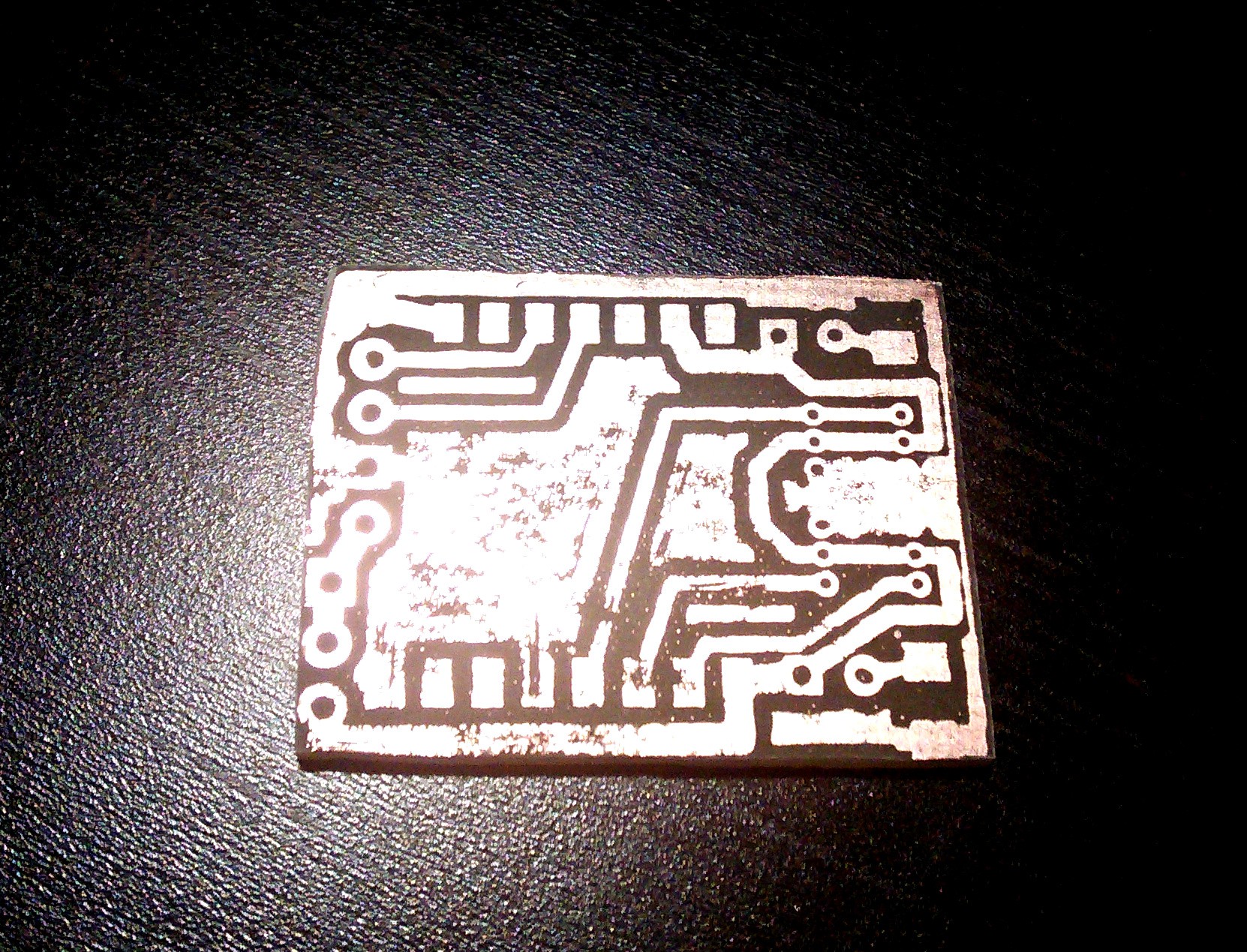
But I quickly re-did the whole thing. Then the acid bath, and cutting the margins, and voila, the finished PCB:
![]()
I still need to drill the holes, but I don't have the drill bit for the 0.5mm holes -- waiting for it to ship in a day or two.
-
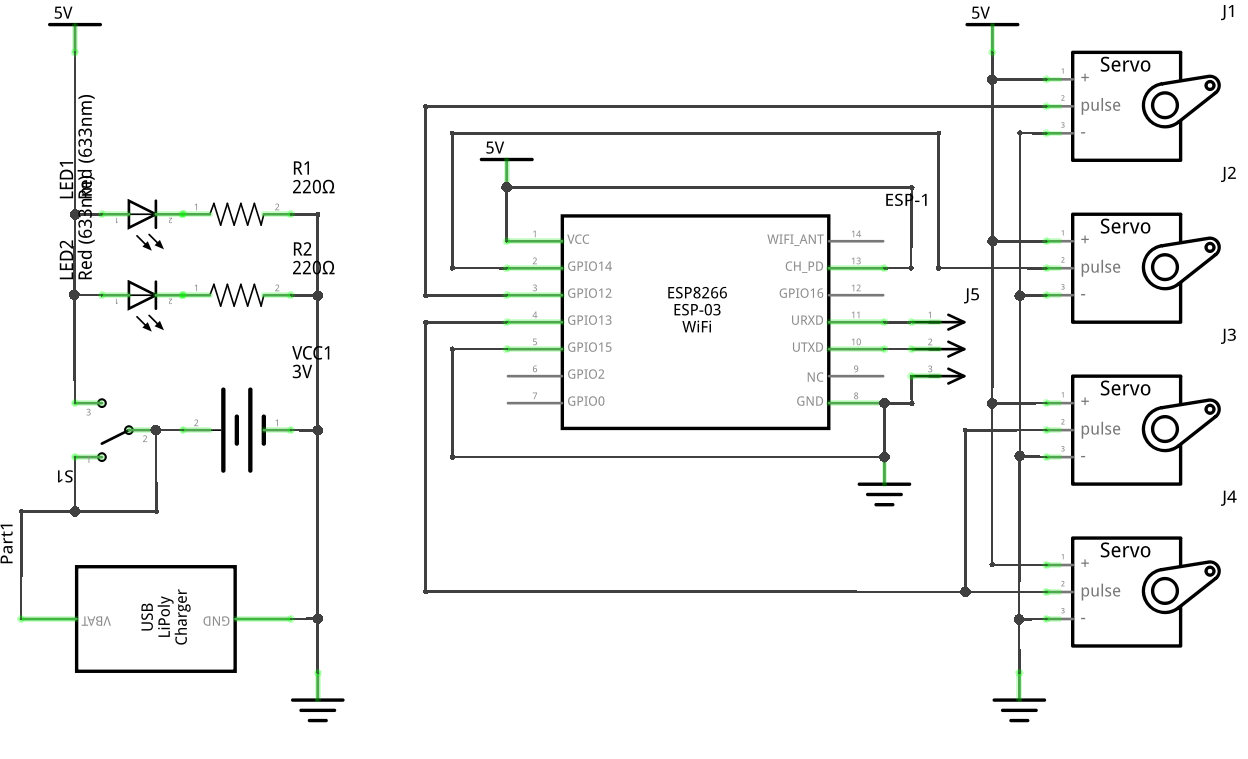
Schematic
01/18/2015 at 19:17 • 0 commentsAs requested, I drew a simple schematic for this robot. The Fritzing file is in the repository (although the ESP-03 module part in it probably has wrong dimensions).
![]()
-
Onward!
01/16/2015 at 15:35 • 0 commentsAfter making a simple pose system, with tweening between poses, time to do the first walk.
As you can see, I had to replace the feet -- otherwise the robot was falling to the side when it swayed too fast. I went ahead and gave them a little more interesting shape.
It also has an USB charger for the battery under the hat.
-
Began Coding
01/15/2015 at 11:45 • 0 commentsA little bit of programming done. The repository with the source code is in the links.
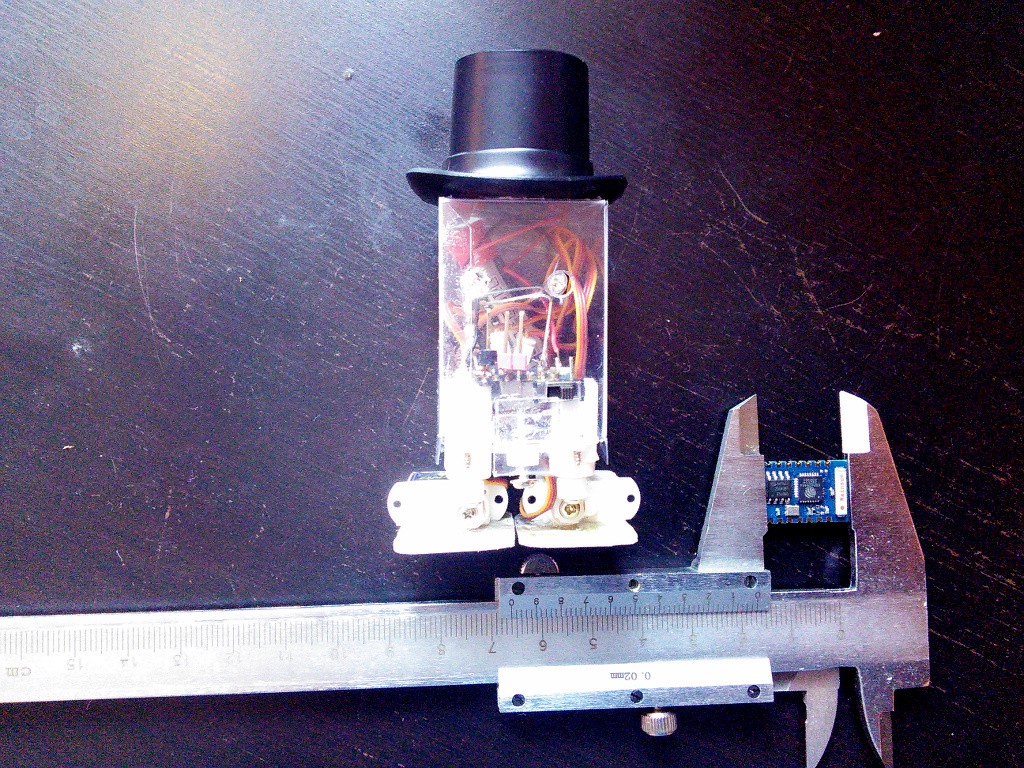
So, basically, I have a Lua console over telnet over WiFi, and a convenient way to send files to the robot using netcat. Not having to connect the serial cables to do anything on it should make it all much more convenient.
![]()
Ah, right, the robot has a hat now, which actually helps it by moving its center of mass a little higher. Next to it you can see the ESP-03 module that I used -- which is quite tiny!