 Dan Royer
Dan Royer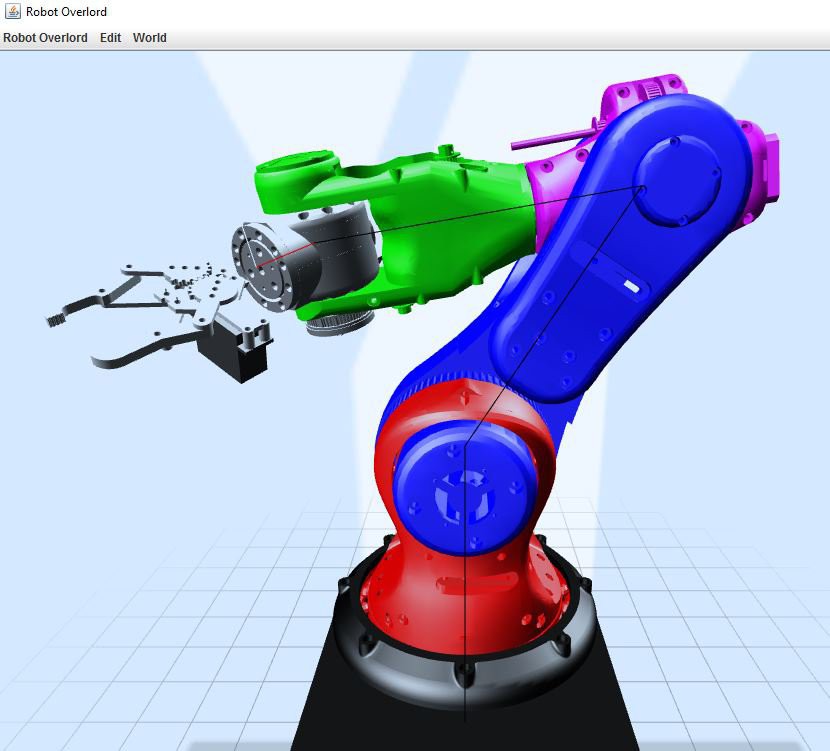
Hello Everybody! Dan Royer here. You may know me from helping such projects as the PancakeBot and the Cypress Umbrella. Glad to be working with @Andreas Hoelldorfer. He's got the hardware and I've got the software, so it will make a good team. Above you see the latest version of Robot Overlord (RO) simulating the Mantis arm. RO is a robot simulation package I've written in Java. Think of it as my One Ring.
First stage was to port the Inventor models into the system and animate them. The line you see running through the model is the software's mental model of the forward kinematics (FK). The FK informs the rendering engine where to draw the parts of the model AND it lets the software check for illegal/impossible arm moves. FK means "if my joints are at these angles, tell me where is the finger tip."
Second stage will be to get the inverse kinematics (IK) working. IK is the other direction - "I know where the finger is, tell me where the joint angles need to be." It will be a naive solution full of singularities because I'm only marginally clever (MC). Sigularities are cases where there may be many valid solutions, and picking an answer is hard for a computer.
Third stage will be firmware to make this arm talk with RO like all MC robots.
More generally, MC is working on adding Vive VR support and record/playback to RO. That will mean telepresence work, gamification, and more.
Dan out!
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.
Hi :) why didn't you use ROS to simule and control this robot?
Are you sure? yes | no
Yes, seriously, Software already exists to move the previous robot arm (Called "Moveo" or "BCN3D" ) and show it in simulation. The IK is all parameterized, so you just edit the URDL file. https://github.com/jesseweisberg/moveo_ros
How to get IK working? That is one of the functions of the above. It generates the IK code from descriptive geometry.
Are you sure? yes | no
Cool! Any idea about the timeline? :)
Are you sure? yes | no
I'm working on IK right now. I have *no idea* now to do the record/playback yet.
It will be ready when it's ready.
Are you sure? yes | no