 Andreas Hoelldorfer
Andreas Hoelldorfer-
Still working :)
08/24/2015 at 14:21 • 2 commentsI'm still working on this project ;) but not I've not so much time.
![]()
Im currently working on a new version again with steppers (Nema24) and belt drives.
I also tried to make my own harmoic drive:
![]()
![]()
It didn't worked as I hoped and I spend a lot of time working on it until now but I will close this aproach.
-
Moving again!
02/24/2015 at 13:32 • 1 commentI fixed the broken parts and started building a housing for the electronic:
-
First broken parts
02/20/2015 at 09:28 • 0 commentsI got the kinematics running but a silly error of let the arm break free. So I reprinted some parts. I used the IK sovler from ROS/moveit: http://moveit.ros.org/wiki/Kinematics/IKFast
I'm very kind of all the people who offered help with this project, I still don't know how to organize that everyone can participate in a good way.
-
Project Update
02/05/2015 at 08:57 • 0 commentsThis an update video about the ongoing Development. I installed the the encoders and printed the hole new robot arm.
You can download the encoder PCB and encoder mounts at:
-
The Gripper
02/01/2015 at 14:49 • 0 commentsHere are the stl files of my gripper:
http://www.thingiverse.com/thing:661286![]() I also will post a video update soon. I made a lot of progress. :)
I also will post a video update soon. I made a lot of progress. :) -
Now Moving with DC-motors
01/21/2015 at 08:50 • 0 commentsI got the motors for the shoulder and the elbow joint running. This thing is quite fast, and strong. I'm now working on the redesing of the other parts and the gripper. I hope I can grasp and move something very soon.
You can download the new shoulder here:
http://www.thingiverse.com/thing:639325
But I recommend to wait a little bit I had some troubles with the cable guides.
The very crude Arduino sketch can be found on github:
-
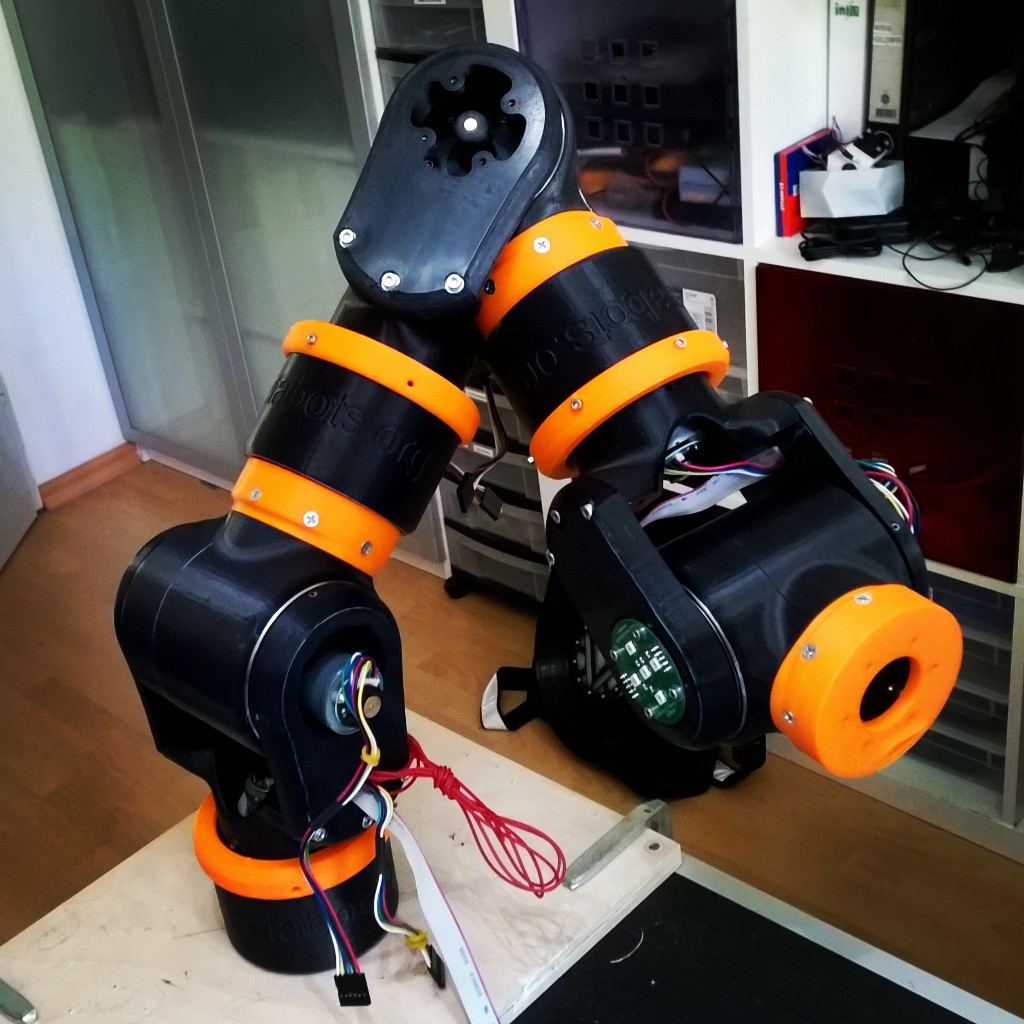
Robot needs a new shoulder joint.
01/15/2015 at 18:23 • 2 commentsThis is part 5 of my robot arm project. This time I updated the shoulder joint with a dc motor driven one. It is finally powerful enough to drive the arm.
I uploaded the new Shoulder joint:
-
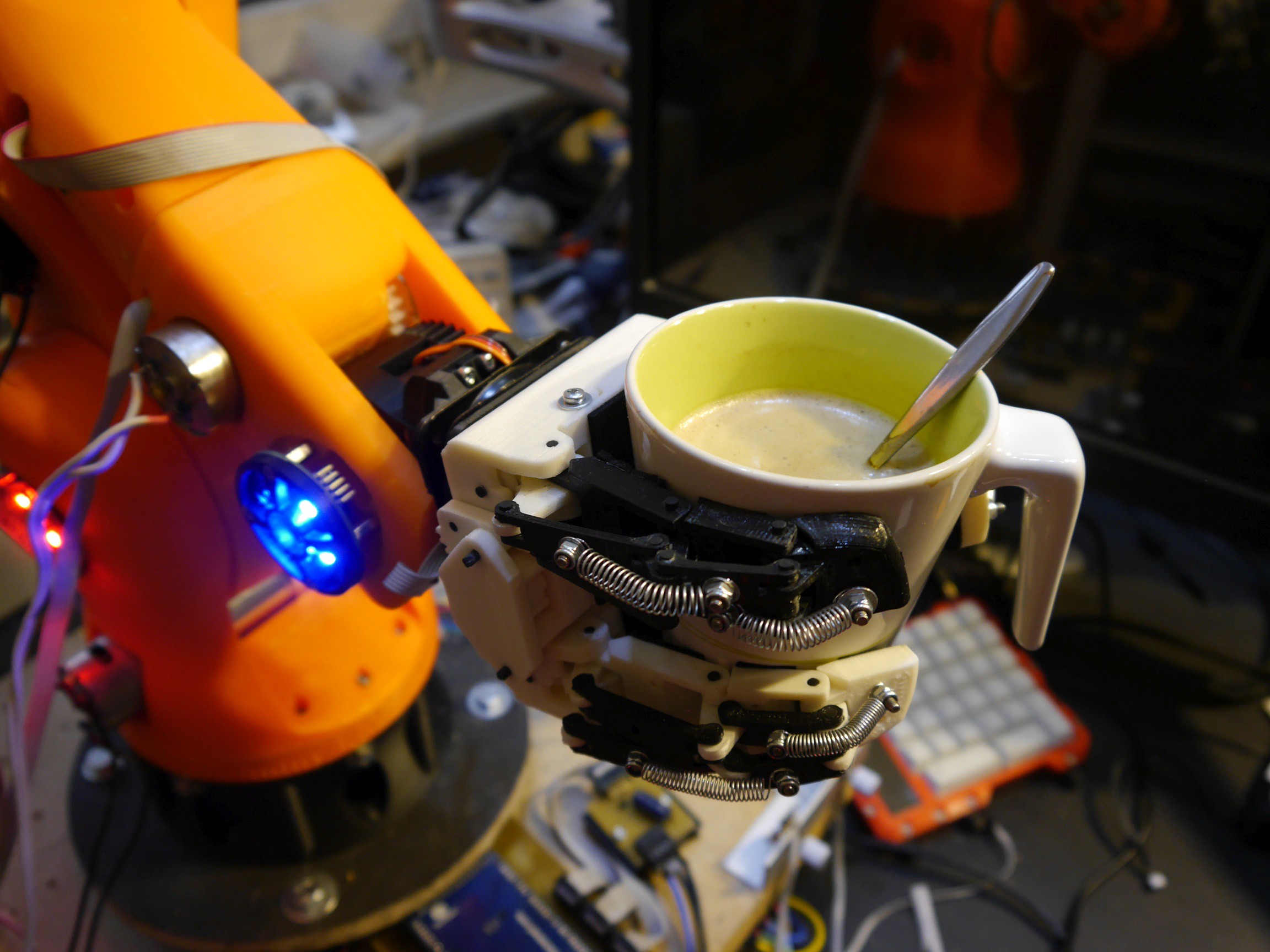
The Gripper
01/09/2015 at 08:12 • 0 commentsThis is a first preview of the Gripper. It is a three finger design. I "copied" the mechanic for a comercial one. Not like measuring every part. I never have seen it in real. I just wachted the youtube video like 50 times.
Here is the idea, I was inspired from:
Does anyone know is it save to publish the stl files or can thy sue me?
-
This is the first Test of the robot arm
01/08/2015 at 22:31 • 0 comments
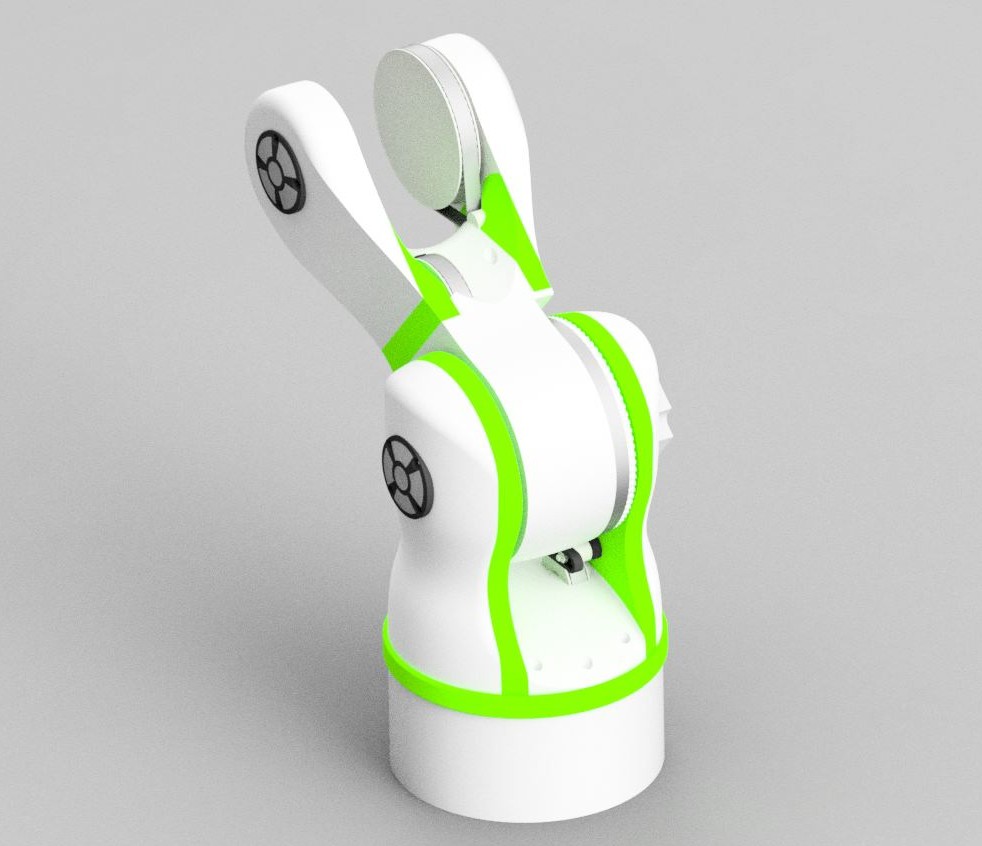
3D Printable Robot Arm
A printable robot arm, a little bigger than the usual hobby servo once.

 I also will post a video update soon. I made a lot of progress. :)
I also will post a video update soon. I made a lot of progress. :)