 Audrey Robinel
Audrey RobinelLast night, i finished rebuilding the electronics board, and i could assemble a functionnal version of R.Hasika. Things are still not yet there, but there was enough stuff to try a simple algorithm.
So i reassembled the robot, and once things were mostly in place i got this :
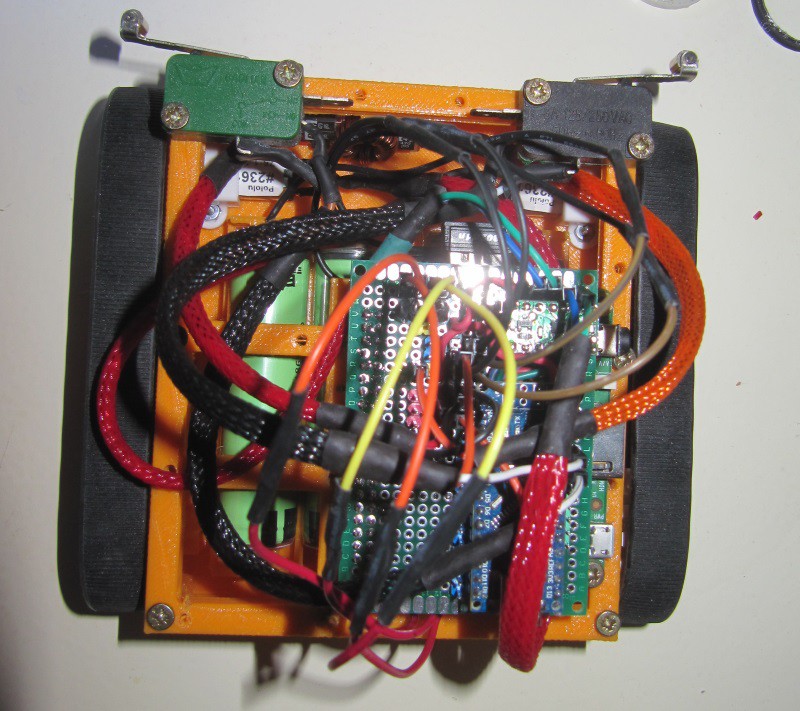
Anyway, i could use the Arduino board to control the motors, and the contact switches i the front did work. I was able to get the robot to execute a simple obstacle avoidance algorithm, as seen in this video :
After the video, i did some other work on the robot (adding a distance sensor, a power button, LED), giving the followig result :
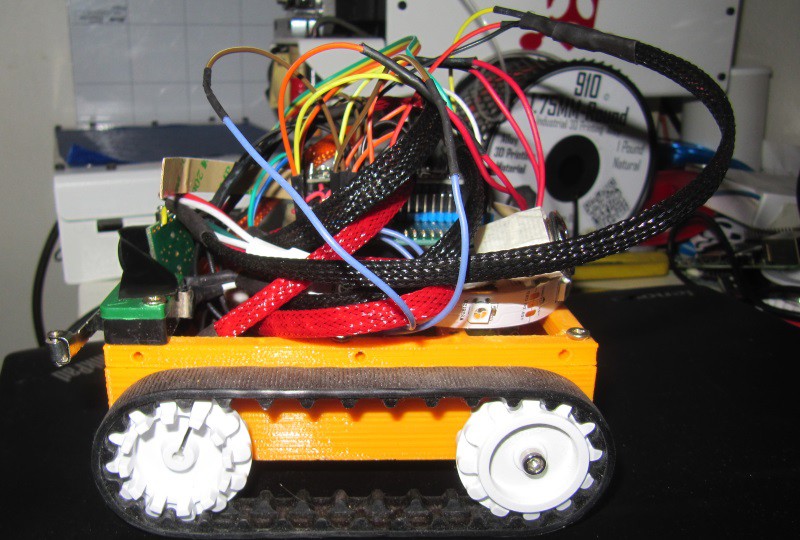
- add a diode, to prevent the motors from beeing powered when plugging the USB cable,
- print parts to hold the sesor and the power swich,
- deciding where to put the LEDs,
- put a divider on the TX output of the arduino then connect it to the RX of the pi
- connect the Rx of the arduino to the Tx of the pi;
- bring power to the pi;
- connect the battery output to an arduino analog pin to monitor battery level;
- put the motors rotation sensor in place;
- print a cover.
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.