 James Newton
James NewtonNot sure why I never linked to this video... it does a pretty good job of explaining the basic idea.
0%
0%
Reagent Robot
Automate the Reagent (take a sample, put a drop of stuff in, shake, look at the color) testing of water for Aquaponics, Ponds, Aquariums.
Become a Hackaday.io member
Already have an account? Log in.
Just one more thing
To make the experience fit your profile, pick a username and tell us what interests you.
Pick an awesome username
hackaday.io/
Your profile's URL: hackaday.io/username. Max 25 alphanumeric characters.
Pick a few interests
Projects that share your interests
People that share your interests









 Jeroen Delcour
Jeroen Delcour
 zakqwy
zakqwy
 Sci
Sci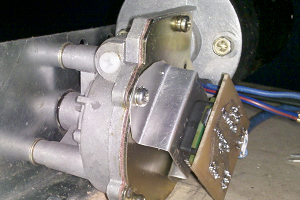
 Alastair Young
Alastair Young
There are now commercial versions of this:
https://www.bulkreefsupply.com/trident-cal-alk-mag-monitoring-system-neptune-systems.html