 Snegovick
SnegovickThis is a 3-wheeled bot with powered front wheel. Front wheel is also used for steering. Two rear wheels are passive and just carry the frame.
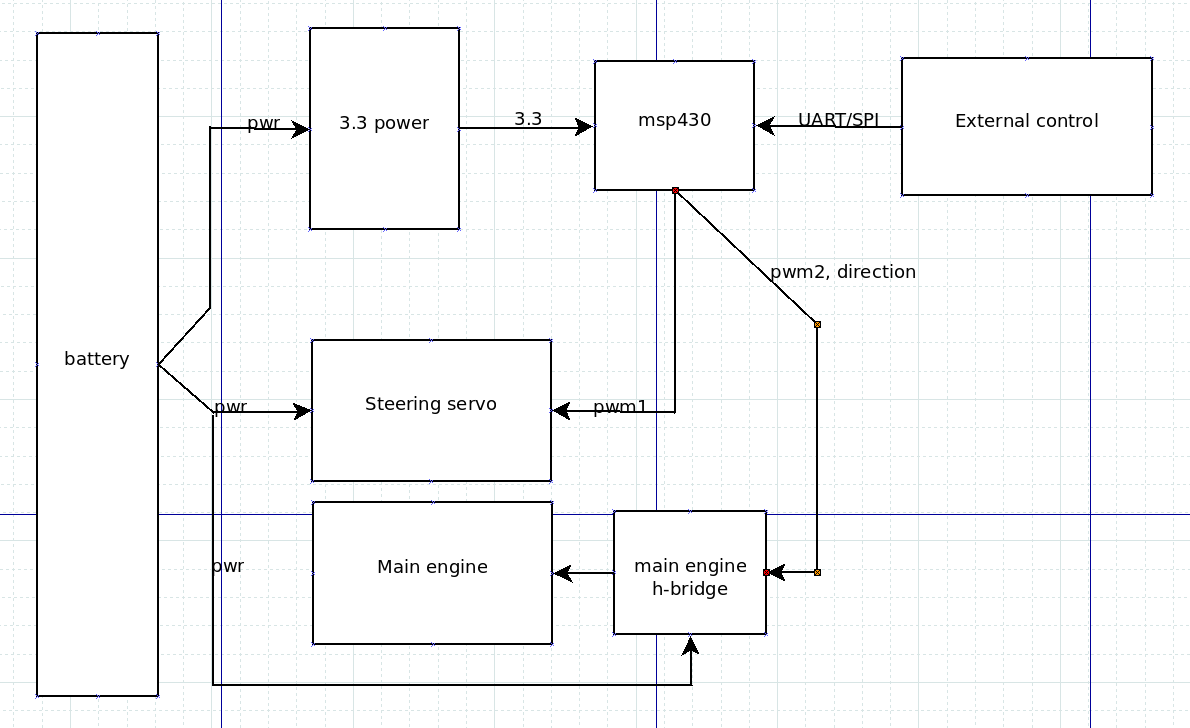
The block diagram of the bot is shown here:
BROVER is a rover (like spirit/opportunity/curiosity and the likes) for balcony
Already have an account? Log in.
To make the experience fit your profile, pick a username and tell us what interests you.
This is a 3-wheeled bot with powered front wheel. Front wheel is also used for steering. Two rear wheels are passive and just carry the frame.
The block diagram of the bot is shown here:
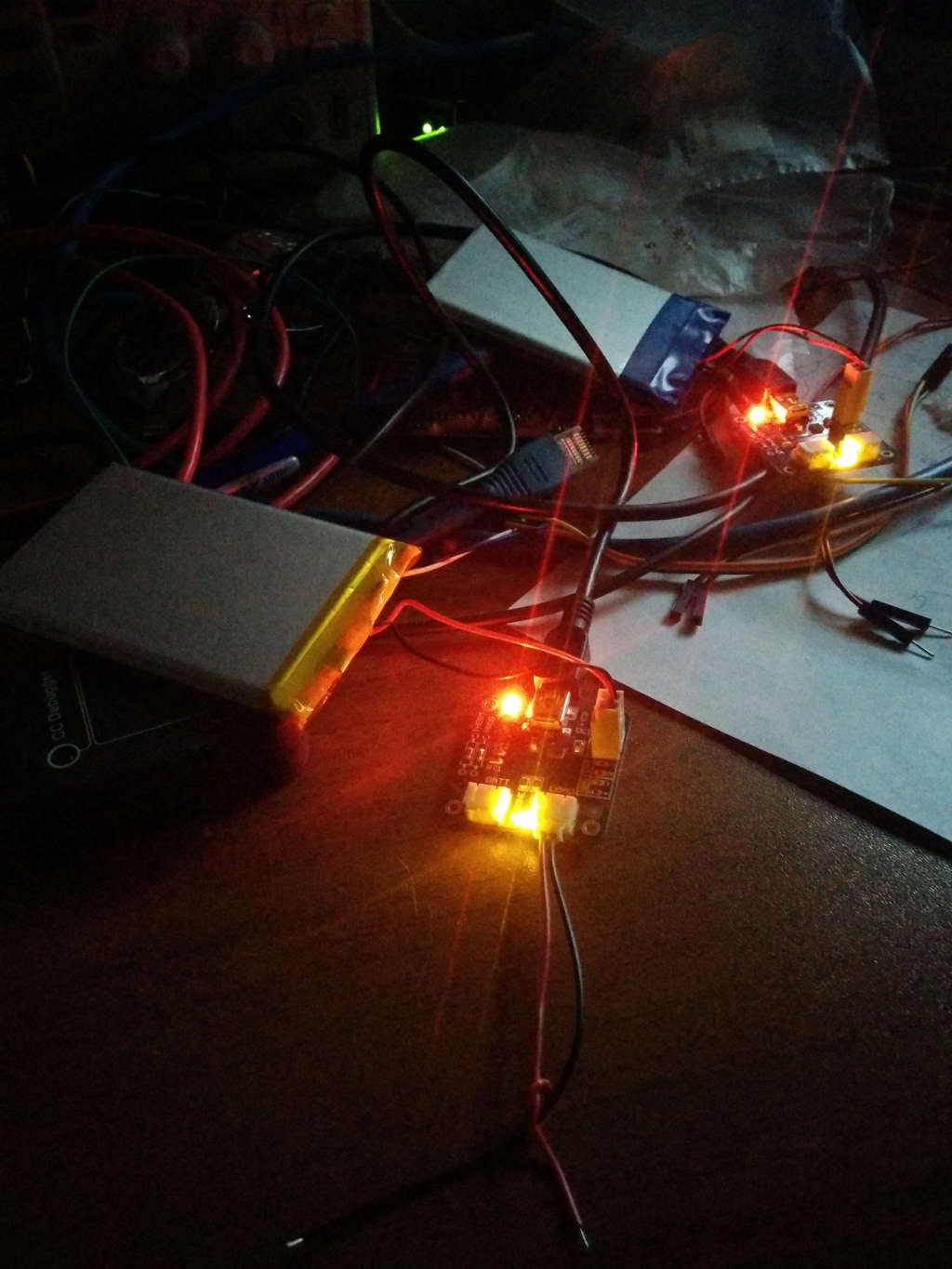
Yay! The electronics is assembled and somewhat tested.
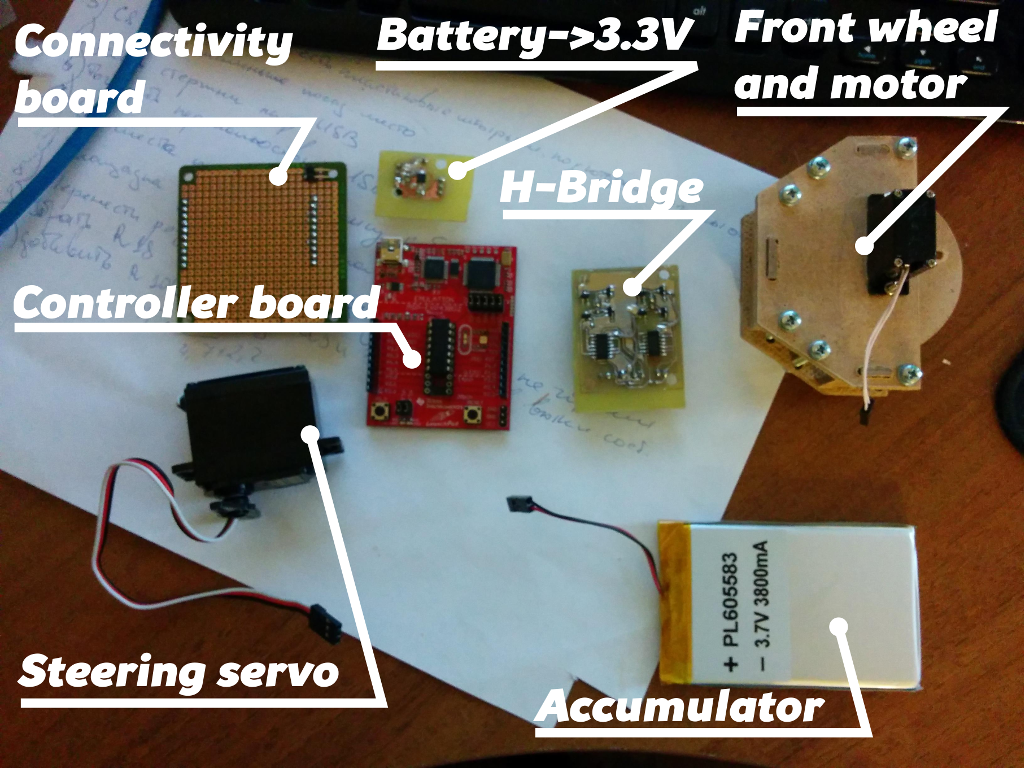
Here are all the parts:
It took most part of the evening to make all the wires, connect it together and correct the mistakes, but in the end, it looks like this:
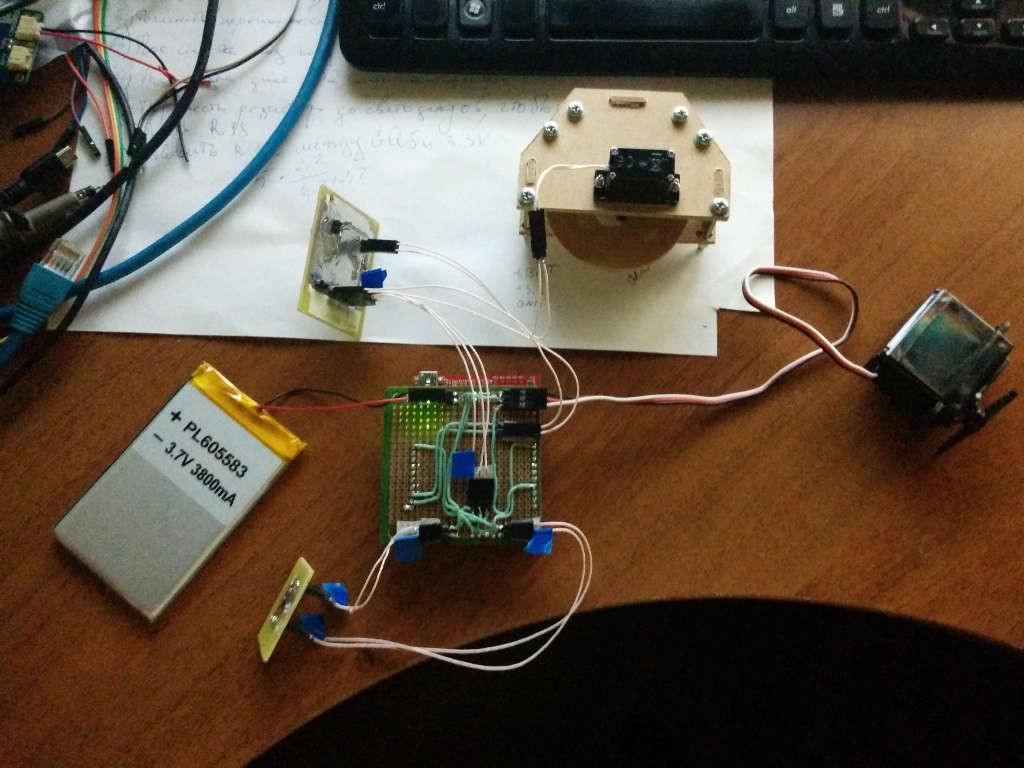
The "connectivity board" sits on top of msp430 controller board and it really is just a board with soldered connectors on it, connected with wires to appropriate pins. I think that making connectivity board is really important, because directly soldered wires are very hard to modify or even check, compared to connectors.
I hate etching. No, really, it is boring. But anyway, today was etch-and-solder day. BROVER needs some good old 3.3V for msp430 which will be controlling the engines, so I took MAX1759 and made a basic board for it:
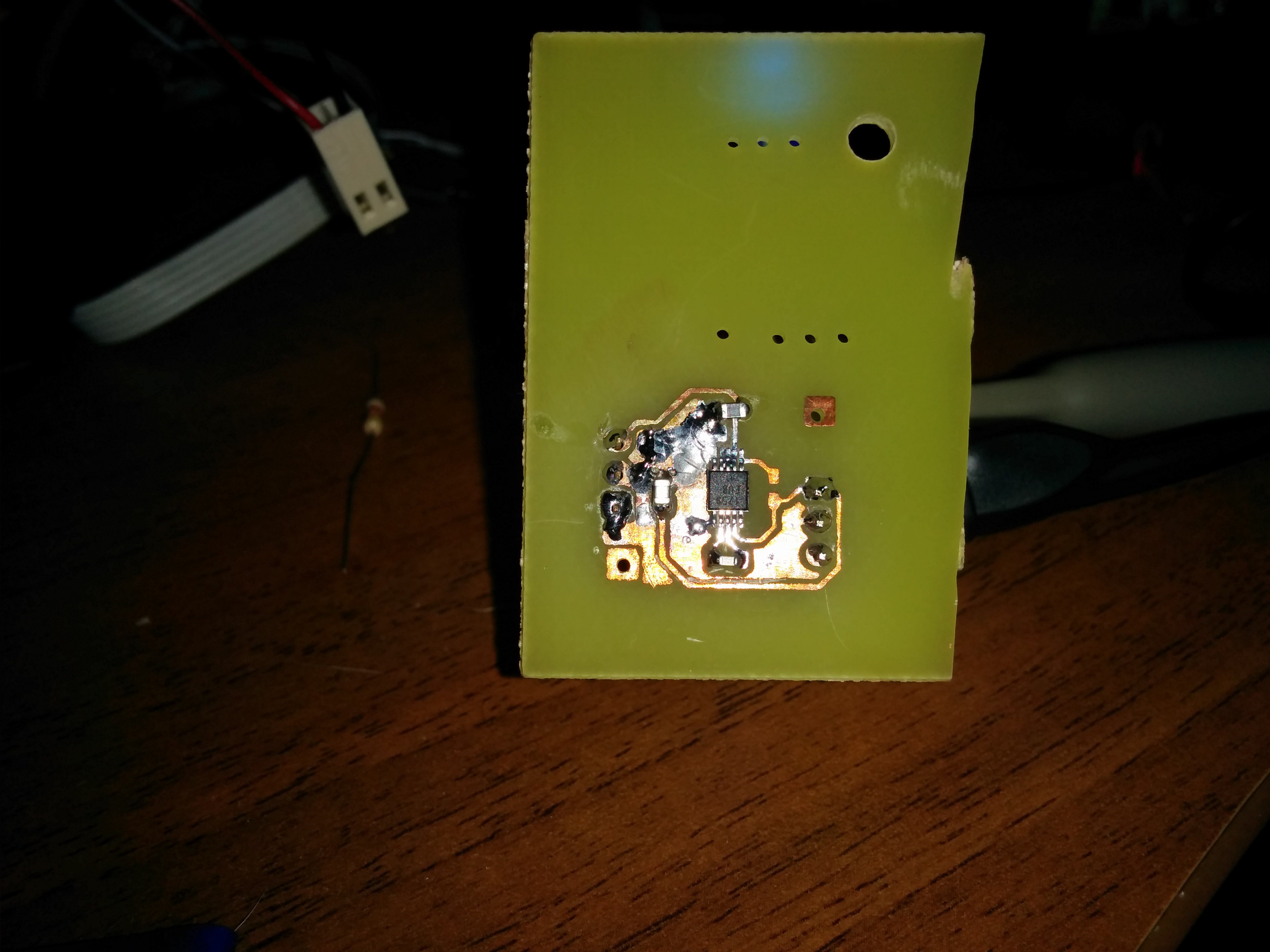
The only problem left with this dc-dc buck-boost converter is that it needs 0.33uF capacitor for its buck-boosting needs, but I only have 0.22uF, so here is the result:
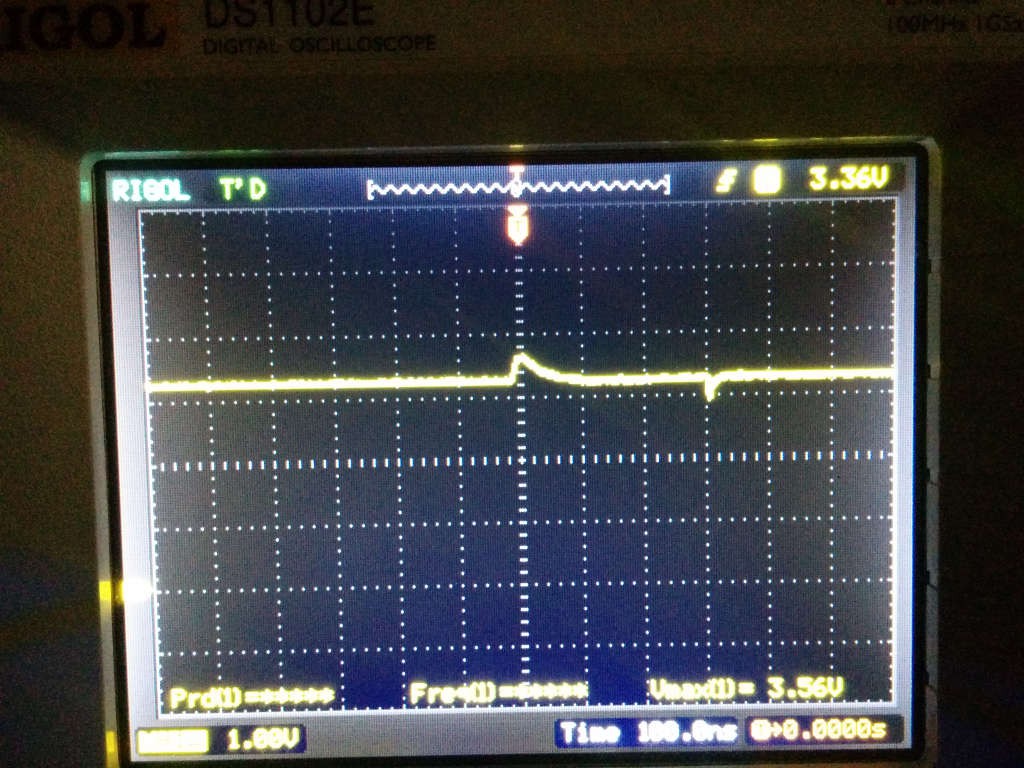
Which is a 200mV bump, which is not good. Will have to look for 0.33uF again.
Charging 3800 mAh lithiums with 1A takes like ALOT of time. The charger boards are adafruit mcp73833 breakouts/chargers.
Front wheel is powered with a "9g" servo upgraded to run continuously.
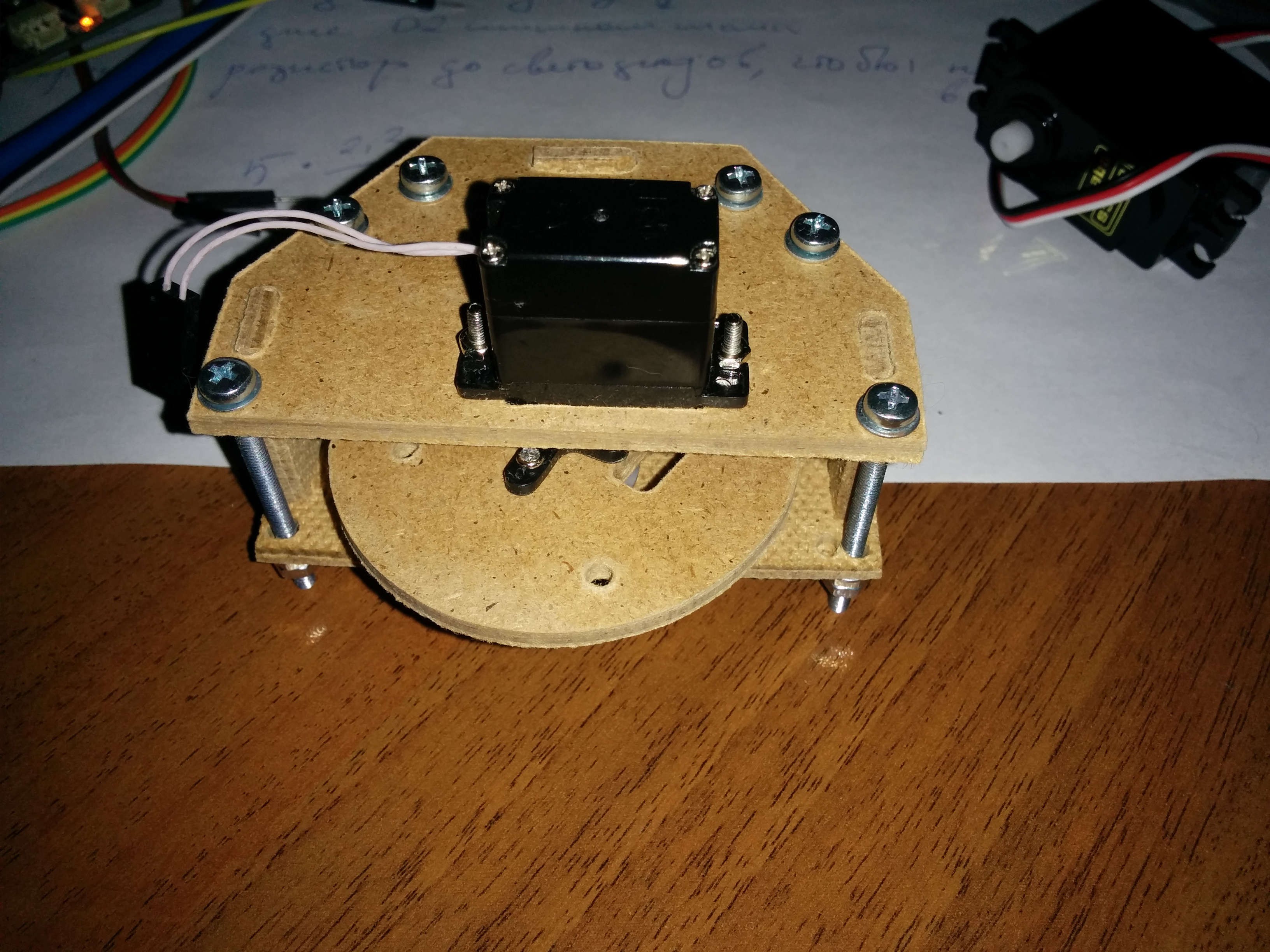
The idea is to rotate this whole thing with another servo mounted on top for steering. Will need some testing on that :)
 Wissam Tedros
Wissam Tedros
 GOAT INDUSTRIES
GOAT INDUSTRIES
 Chris
Chris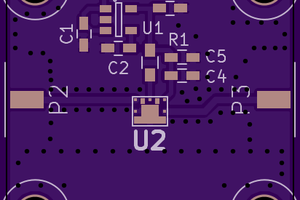
 Elia
Elia