zakqwy
zakqwy-
Initial Thoughts
02/18/2015 at 20:15 • 0 commentsAs I mentioned in the description, I'm mostly looking to improve the motor mount system--I'm not a fan of two friction interfaces working against each other, especially when one can potentially cause damage to the motor leads. Last time I tried to pop off a broken prop (it happens a lot) and snapped a lead, I ended up ripping the whole thing apart, clipping off soldered-on motor leads and pretty much forcing myself down this fun path.
So--a few early thoughts:
- CFRP tubes for arms (ordered, we'll see if it's way too small)
- 3D printed (SLS nylon via Shapeways) motor mounts with split ends to accept a tiny clamping screw
- Landing gear of some kind, maybe built-in to the motor mounts, maybe separate (clamps onto the arms)
- Some type of center connector to support the board and battery compartment and link the CFRP tubes together
- I'll likely ditch the four outer LEDs--lower power consumption and a bit less weight/complexity (fewer wires). The X4 main board has the two 'eye' LEDs that should still give me visual indication of battery life and so forth. Maybe I'll bottom-mount one of the other ones? We'll see.
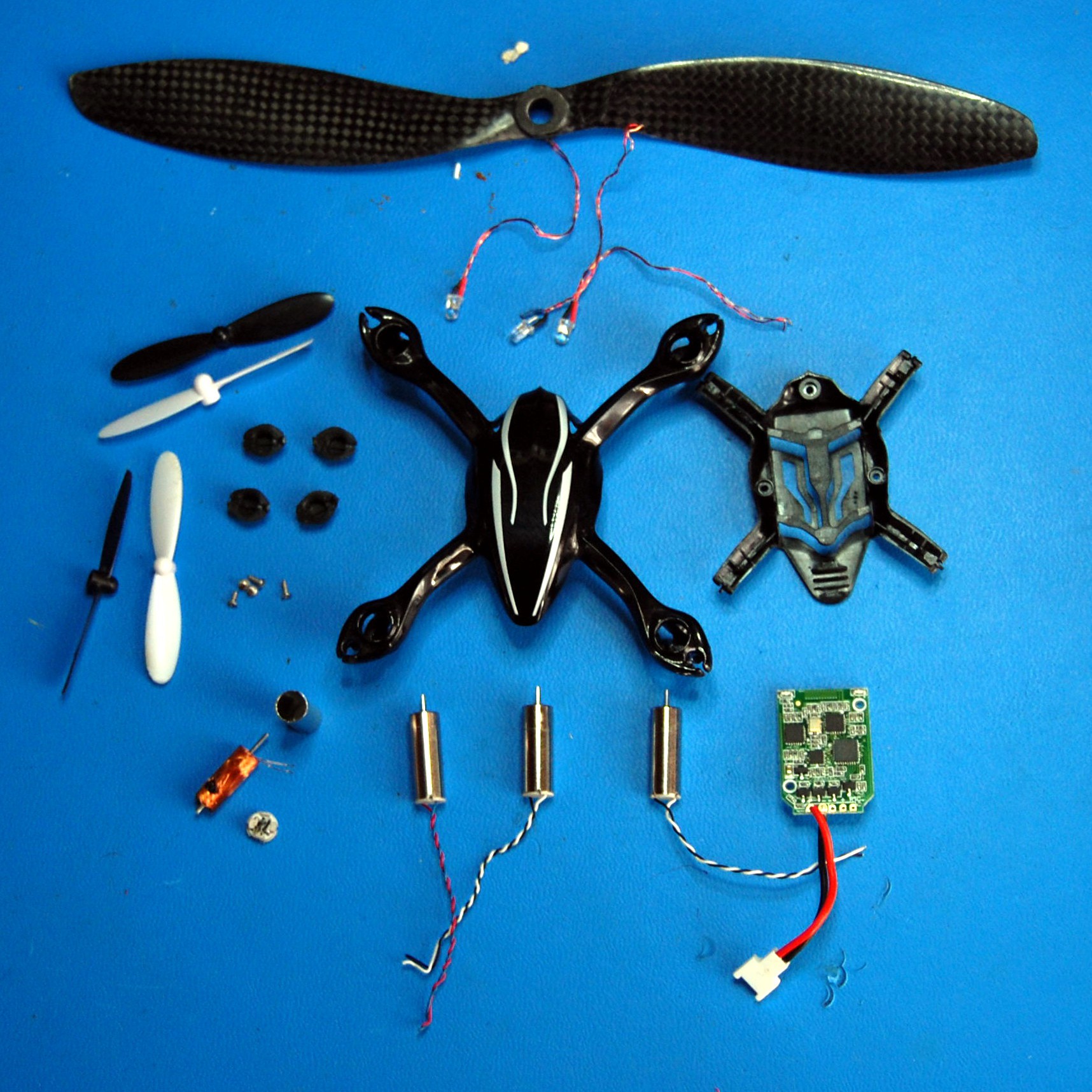
Current state of affairs (I included one of GimbalBot's 8" CFRP props for scale):
![]()
I'll get CAD'n at some point, that should make this all a bit more clear. Bonus points for adding lightness I suppose, but the stock frame is pretty feathery as-is. I also need to study the existing X4 replacement world--I know tons of people have done this already and it's always good to have a starting point.
Hubsan X4 Replacement Frame
Love the product--fun, safe, cheap, easy to fly. The stock frame works and is light enough, but I want to make a few tweaks. For science.