 Peter McCloud
Peter McCloudThe weight and thrust measurement portion of the test stand is almost complete. When the test stand was reassembled in the new shop the support bars were completed. The support bars transfer the weight of the quadcopter to the load cells. As described previously, the force needs to be applied to each load cell without any side forces or moments. The support bars are setup to accomplish this.

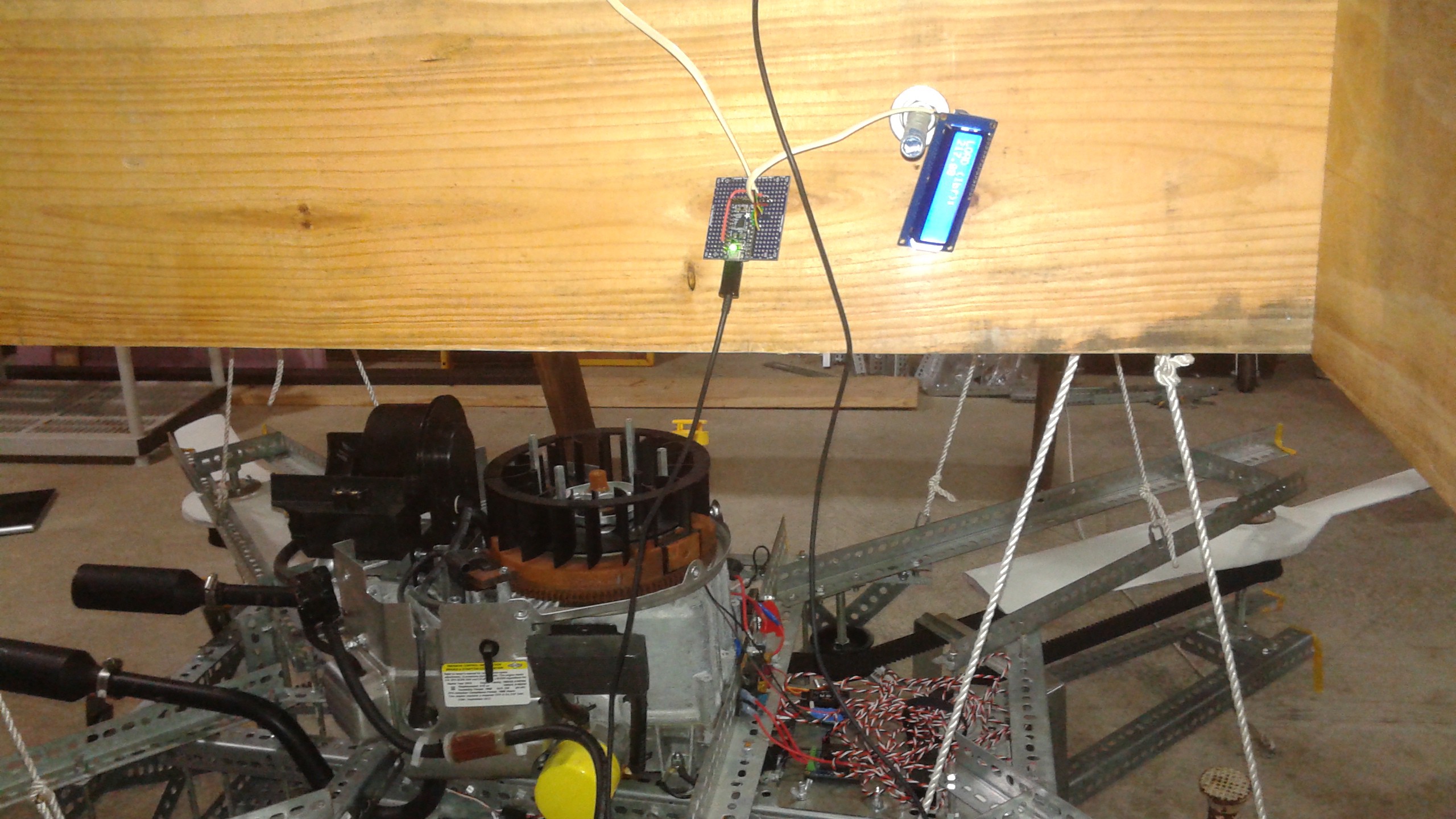
Under the ends of each of the support bars are where the load cells are installed. Since I'm still prototyping, I decided for now to assume symmetry from left to right of the quadcopter and only hook up the load cells on the right side of the support bars. Here's a shot of the electronics connected to test stand. On the right is the LCD showing the reading and the left is the Pro Trinket that is reading the load cells and driving the LCD.
The final step was calibrating the load cells. I modified the code on the Trinket Pro to spit out the raw readings. Once I got the reading with the quadcopter on the load cells, I then weighed the quadcopter using the scale. I also recorded the readings with no weight on the load cells. With the two readings and two weight measurements, I now have a calibrated setup where I can weigh the quadcopter and measure the thrust produced.

The next step will be securing the hardware and making so that I can read the thrust measurement while the quadcopter is running. I'll get the cleanup code upload in a day or two.
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.