 lion mclionhead
lion mclionheadDid 1.4 mile repeats in the apartment complex, with different wheel alignments.
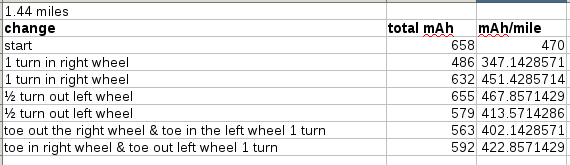
It was very inconsistent, but had a bit of a local minimum. A 6.3 mile drive with the spherecam & 2 batteries burned 519mAh/mile. Looks like either increased contact area or bad transmission fluid is killing it. If the wheels wear down as fast as before, it'll definitely go back to the stock camber, but it might be worth just letting the stock camber wear them out in exchange for longer range. It'll probably go 400 miles with tire rotations, which is 1/2 as far as shoes can go. Another idea is coating the wear pattern in an expendable but cheaper coating. Rubber coating paints abound, for a price.


The new servo continued to show problems with its center point drifting right, so it wasn't a bad pot. It could be pushrods slipping, a bad connector, or voltage going off. The left wheel tends to turn more right while the right wheel stays centered.
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.