 Hinal Shah
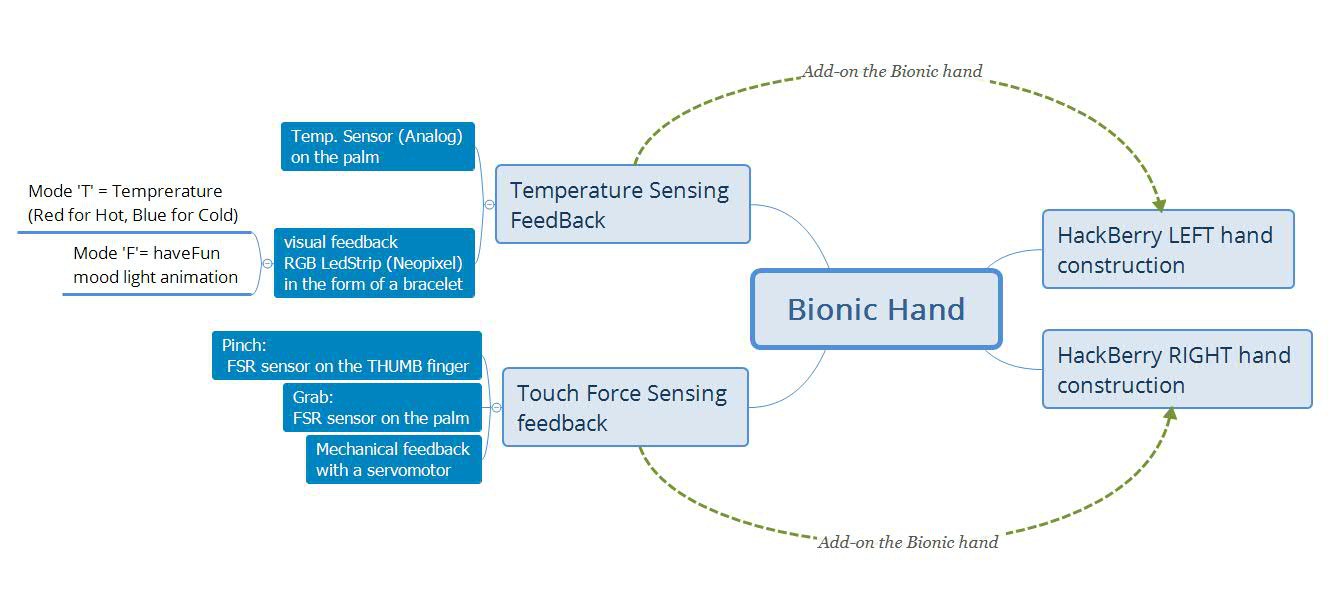
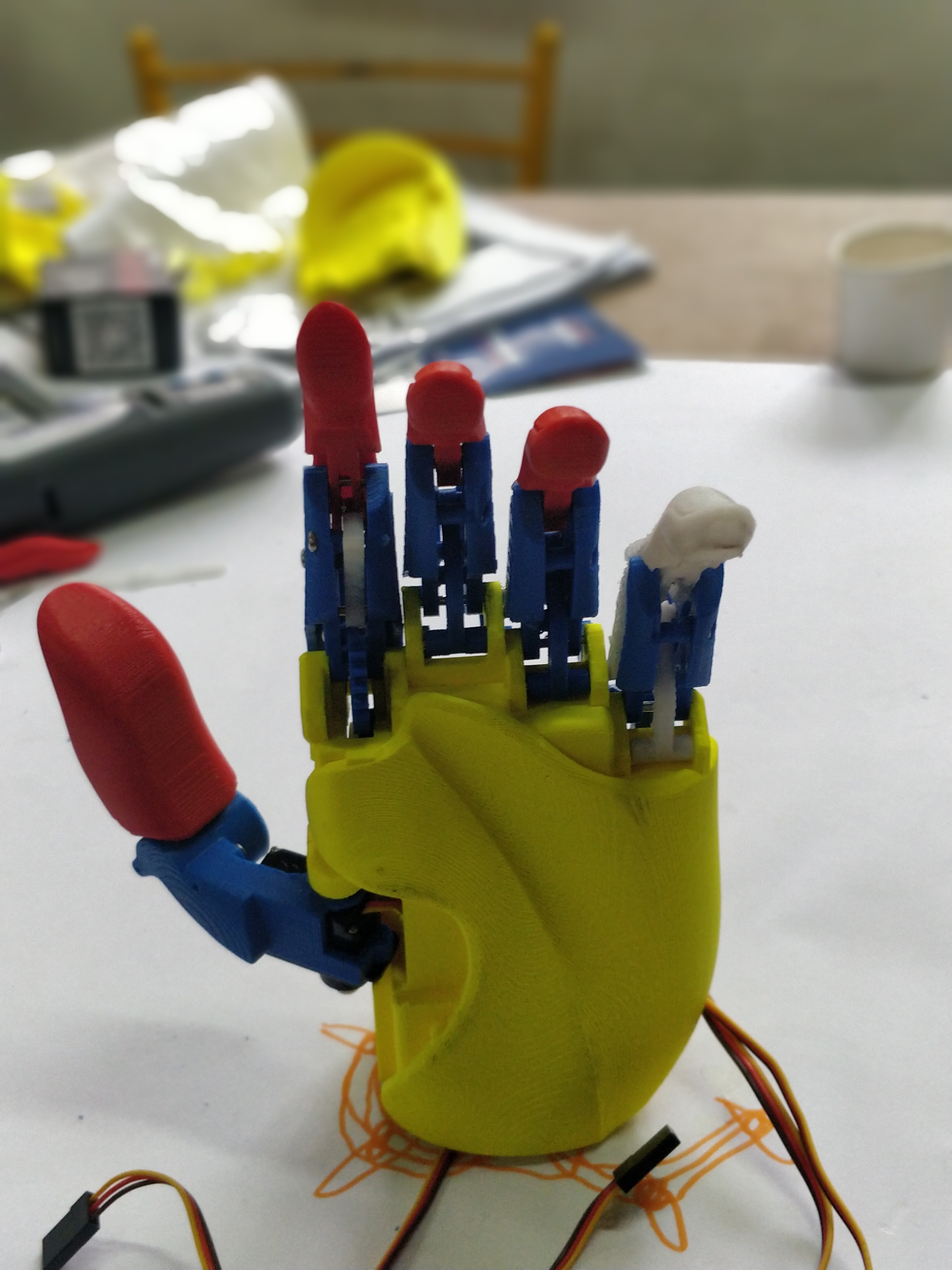
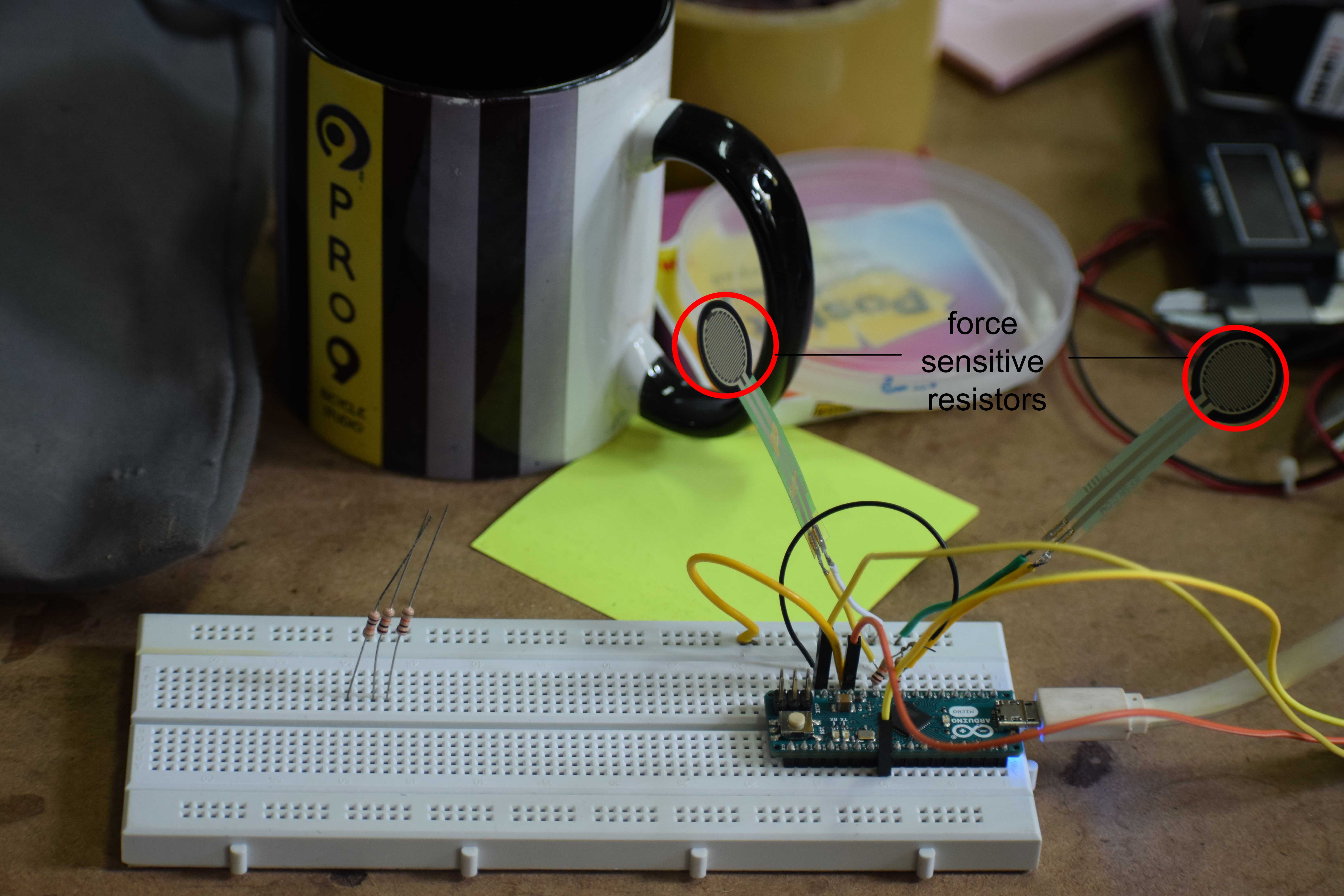
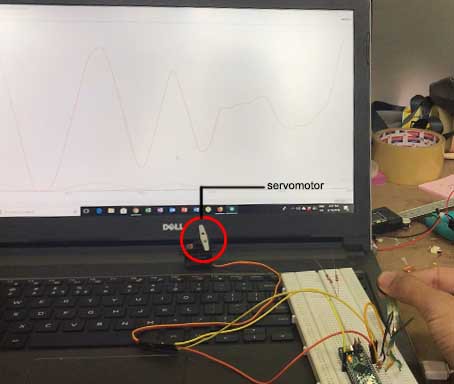
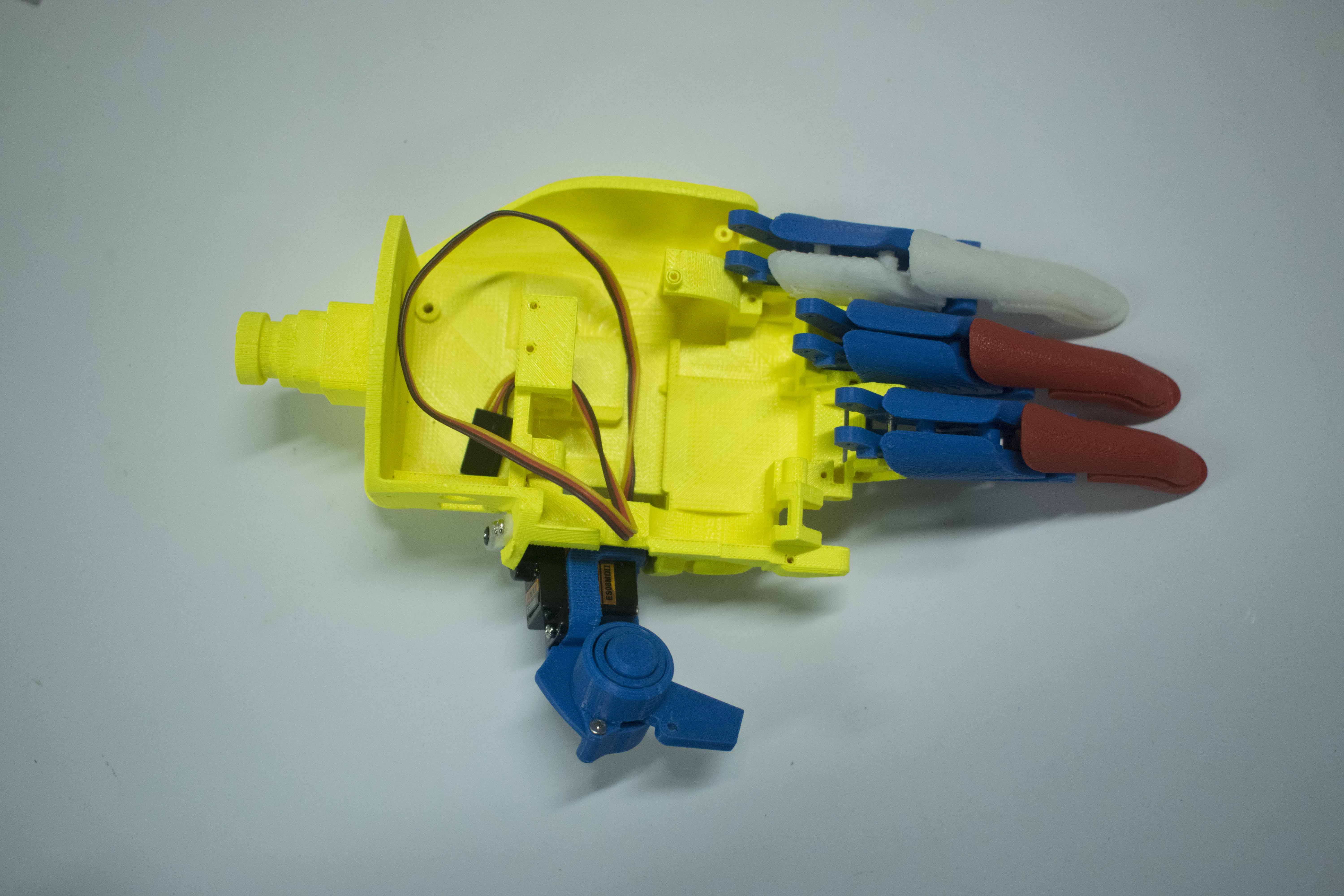
Hinal ShahThis project includes the attachment of two types of sensors, temperature-sensing and force-sensing on Hackberry 3D printed hand. There will be two force-sensing resistors, one on thumb and other on palm. The temperature sensitive resistor will be attached on the palm. These sensors will enable an amputee to feel temperature and strength while picking or grabbing any object. The attachment of this sensors, stand as an improvement of Hackberry 3D printed hand.
The following schematic diagram summaries the project Hackberry Feedback System





 Ian Maday
Ian Maday
 Gerardo
Gerardo

 Open Bionics
Open Bionics