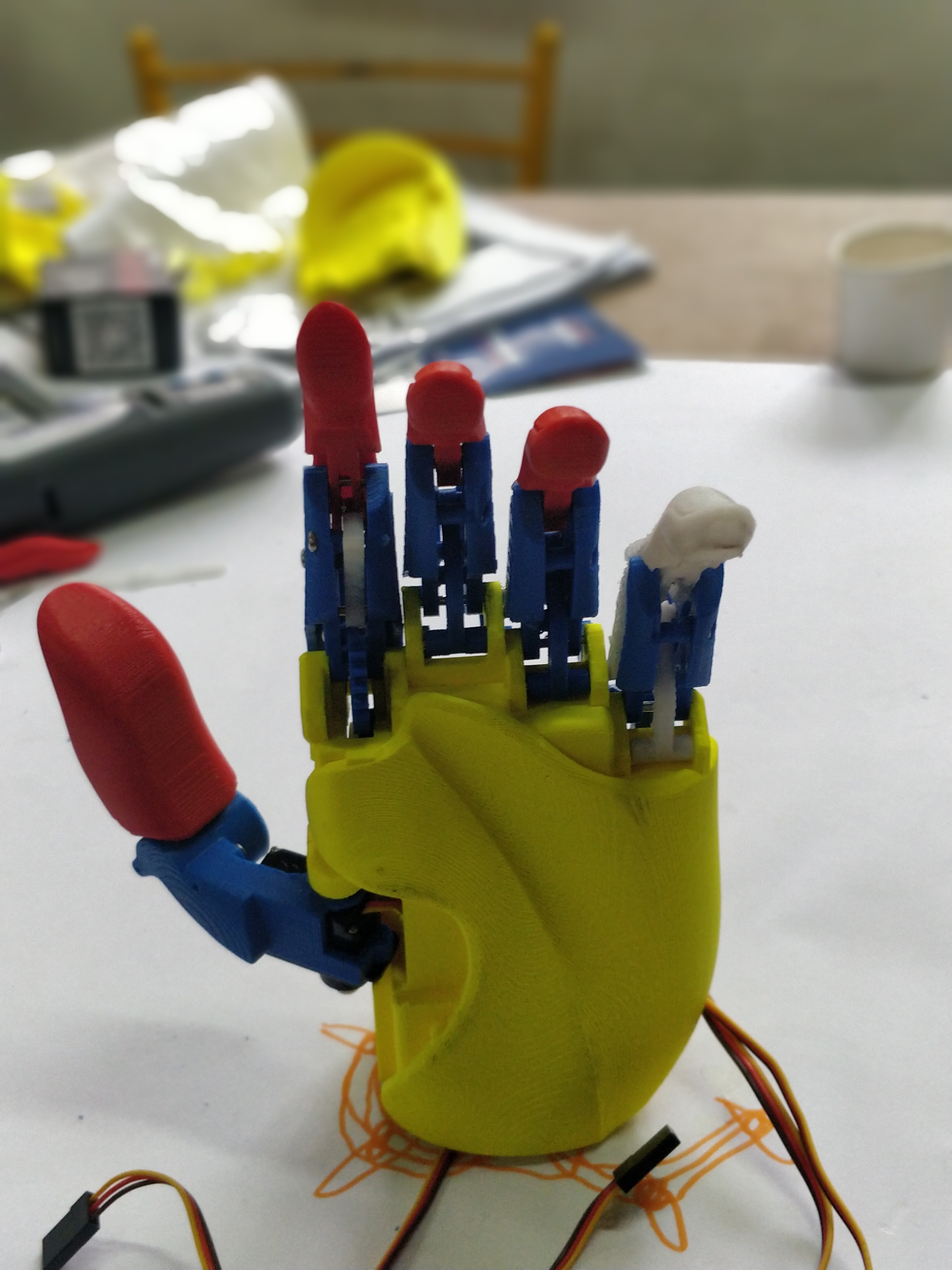
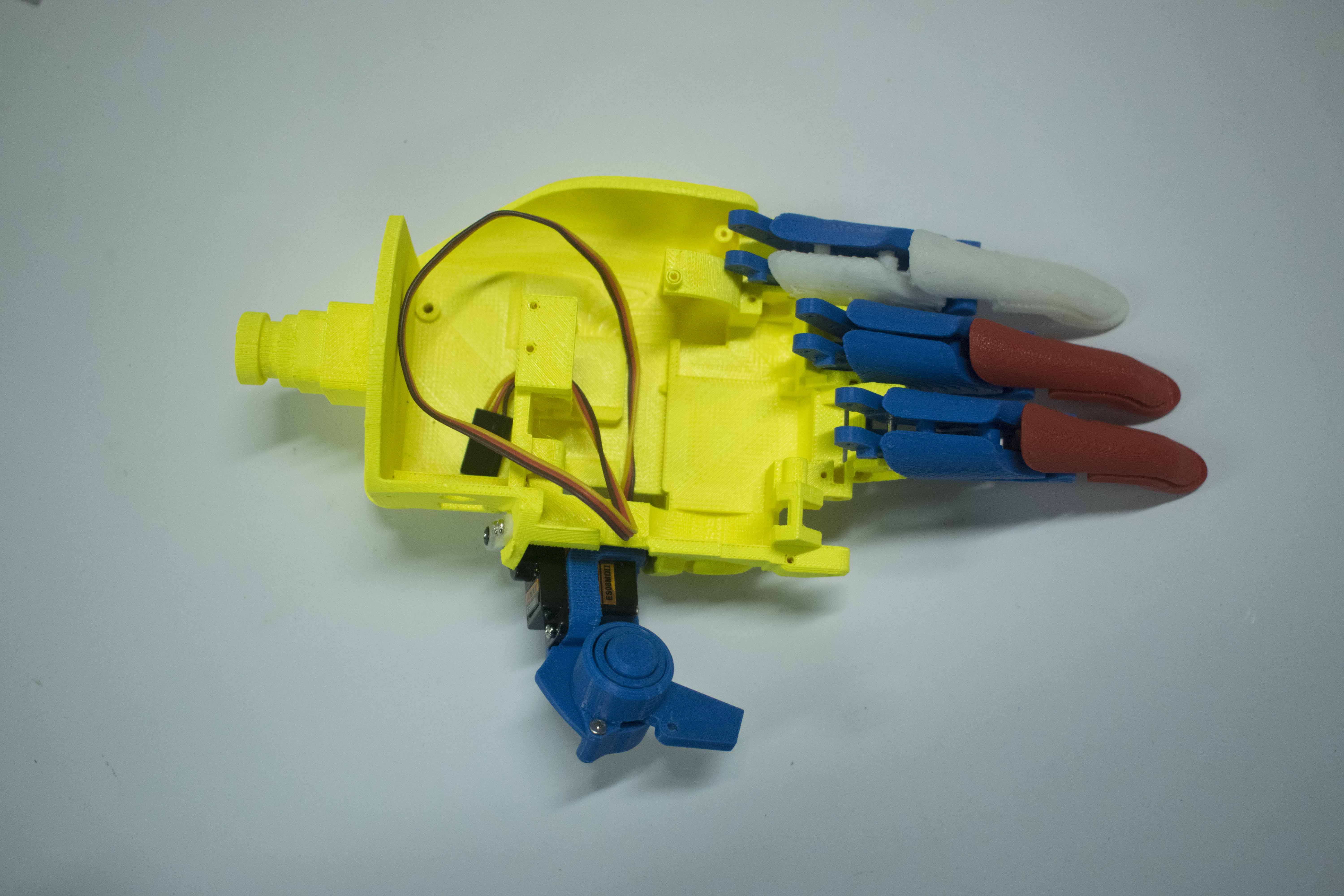
Today we attached the forefinger and thumb to the palm of 3D printed Hackberry Hand. The forefinger was attached to a separate servomotor with gear system. The thumb too was attached to a different servo motor. Rest three fingers were attached to a single servomotor and hence their movement is synchronised together.
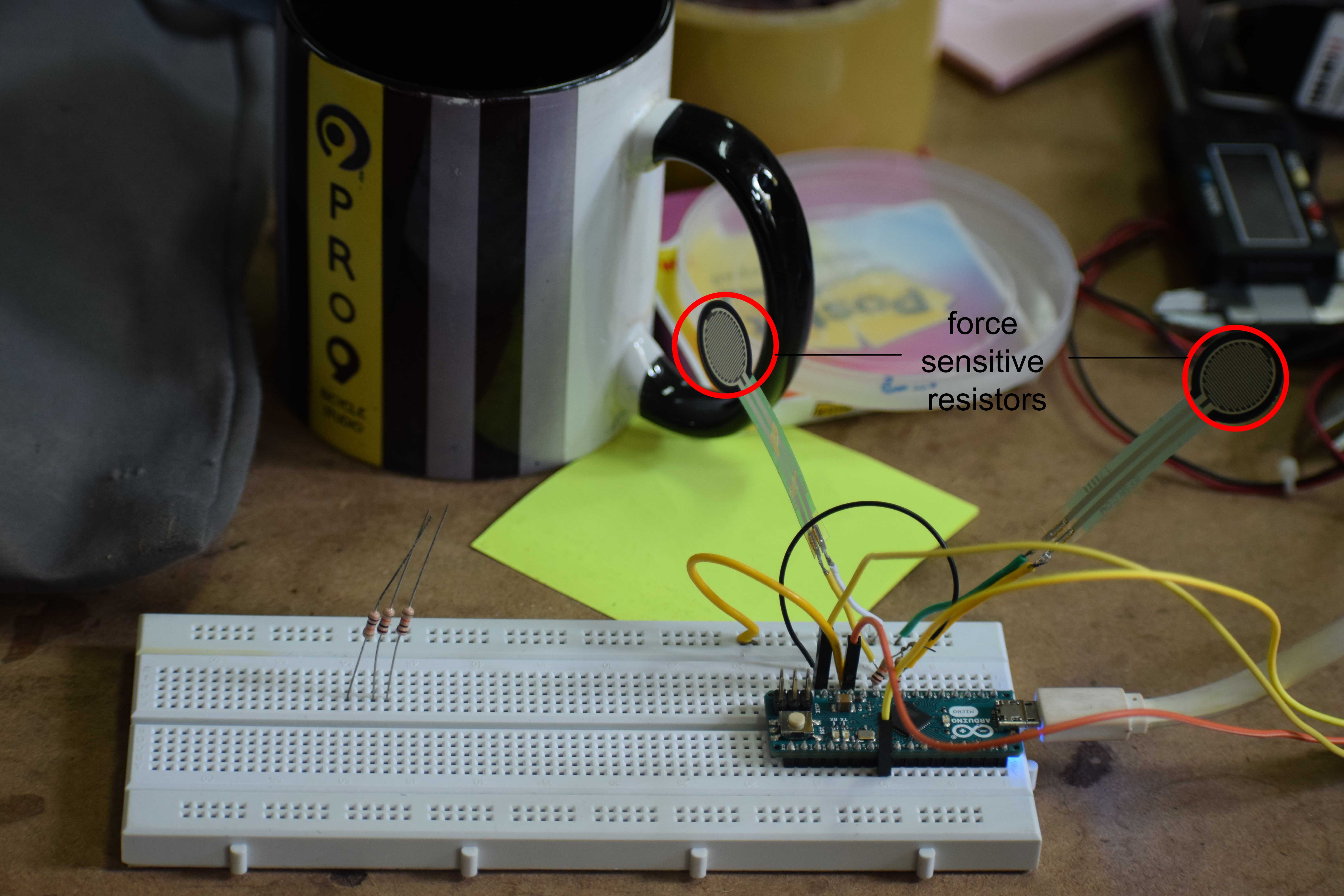
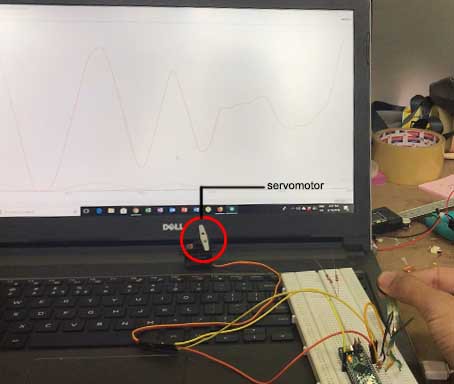
Post R&D performed yesterday, today we have integrated two FSRs on the feedback system, one will be used on the thumb and the other on the palm. This simulated the force measured while pinching and grabbing respectively. The force that is measured is converted to a servomotor motion which is used as a feedback for the person which indicates the firmness of the grip. The two red rings encircle the two force sensitive resistors respectively.
The day-2 of the Prototype session began with Jean improving the temperature sensor circuit for the Bionic hand. When the system works on 'T' mode, the Led strip turns blue and red on touching any cold or hot object respectively. One can change the mode with a push on the touch button. On 'F' mode the user can experience fun of having colourful lights animation which gives a cool disco effect!
As a part of R&D for feedback system of the bionic hand, we have started with the force sensing resistor (FSR) and have begin the calibration in order to get the different values for holding and grasping different objects.
 Hinal Shah
Hinal Shah