hebel23
hebel23-
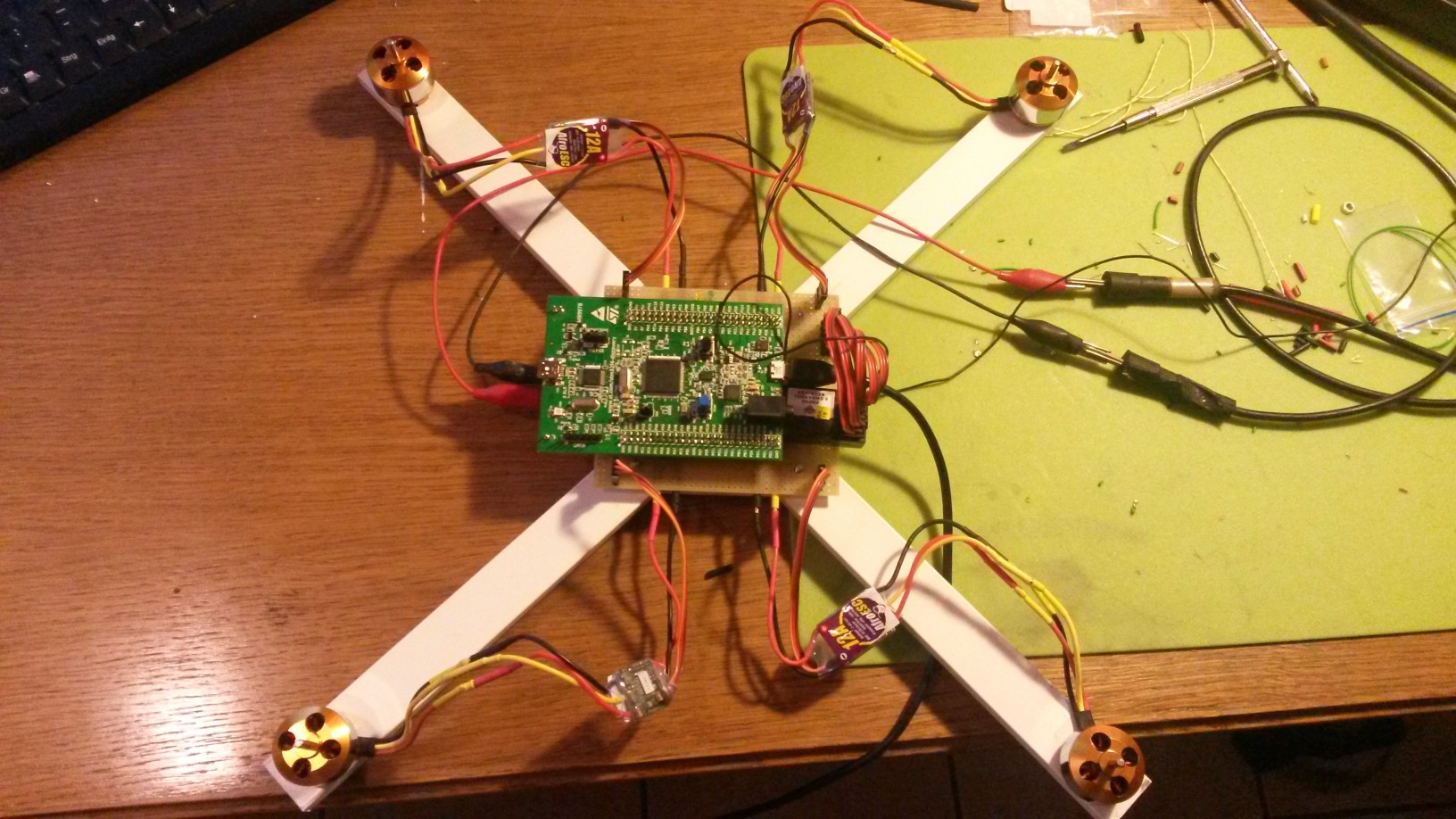
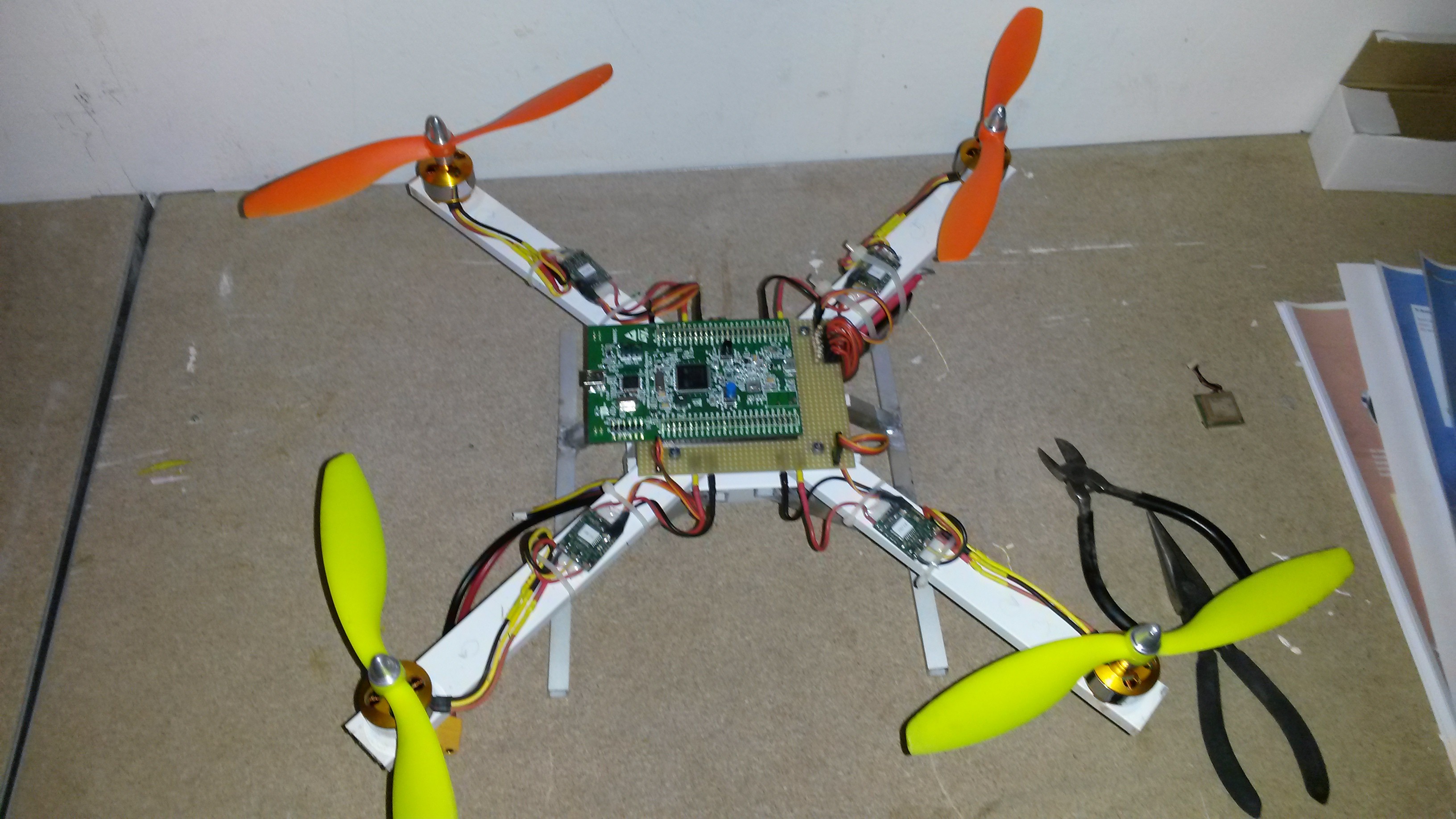
Final assembly and the first flight
04/08/2015 at 20:46 • 0 commentsHe is flying! OK a couple of things are to do...
- Adding GPS
- Adding fail safe (at the moment the copter flies away if I turn out the remote control)
![]()
![]()
![]()
![]()
![]()
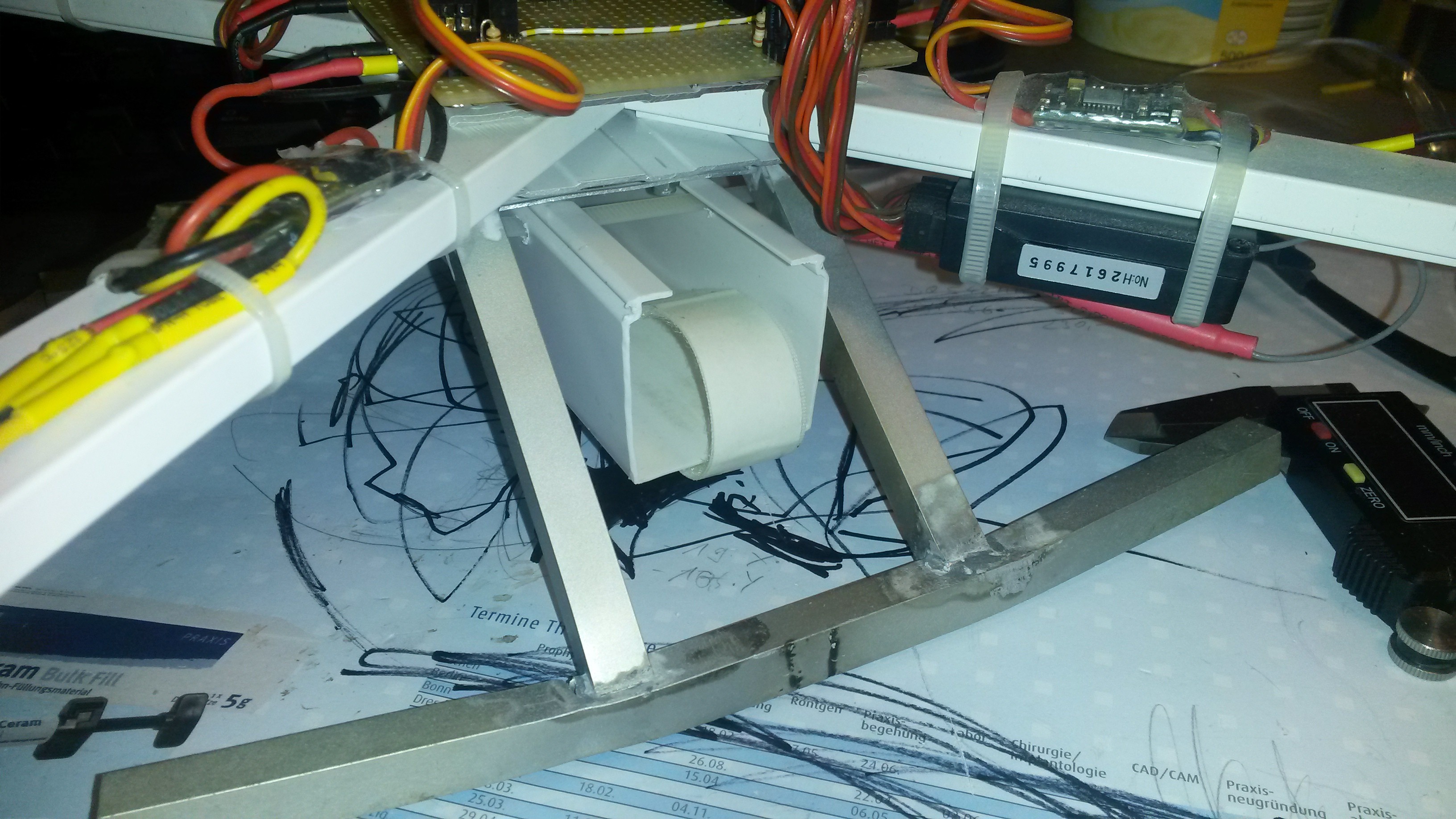
The stand is soldered from alloy profile.
-
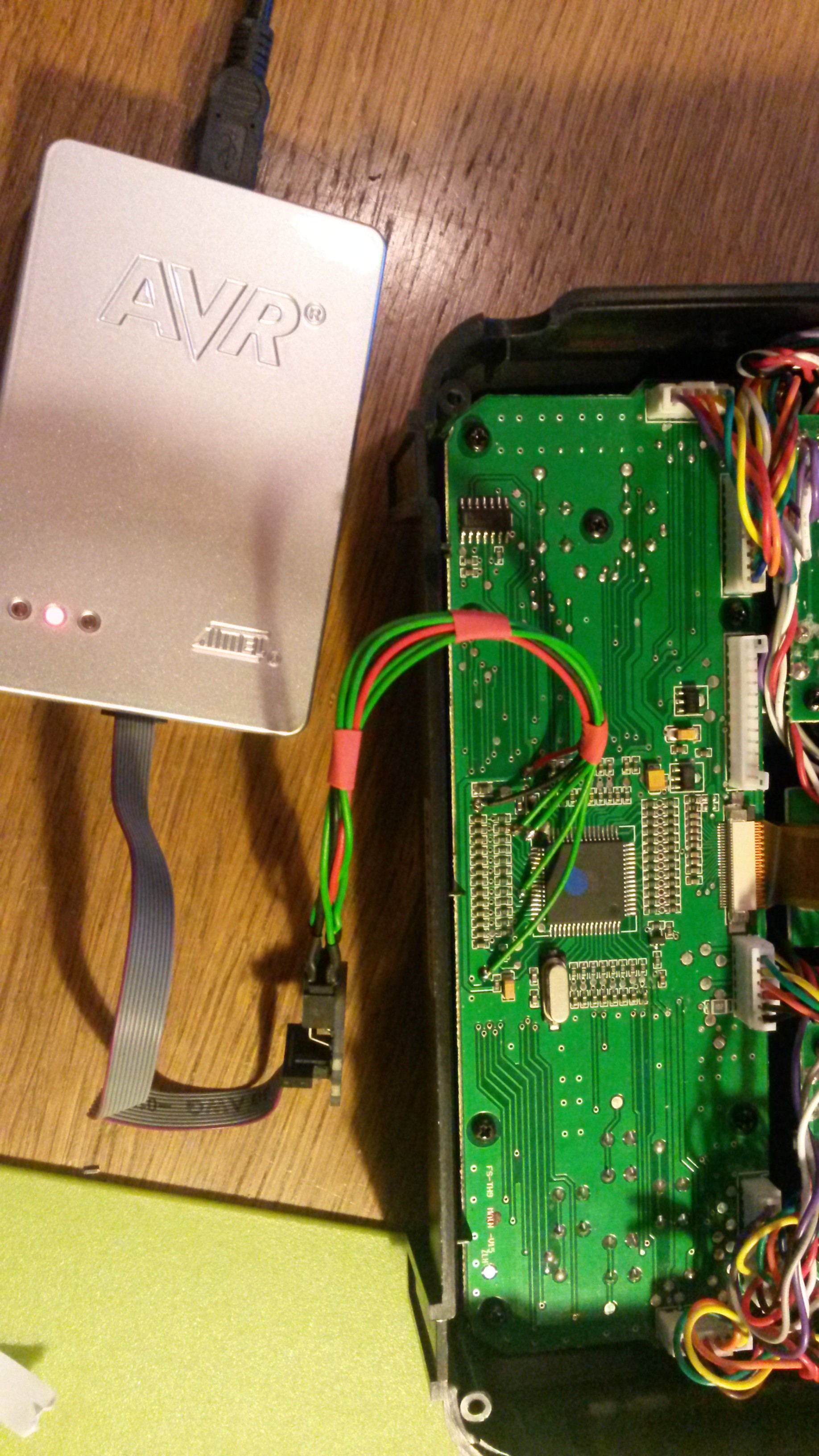
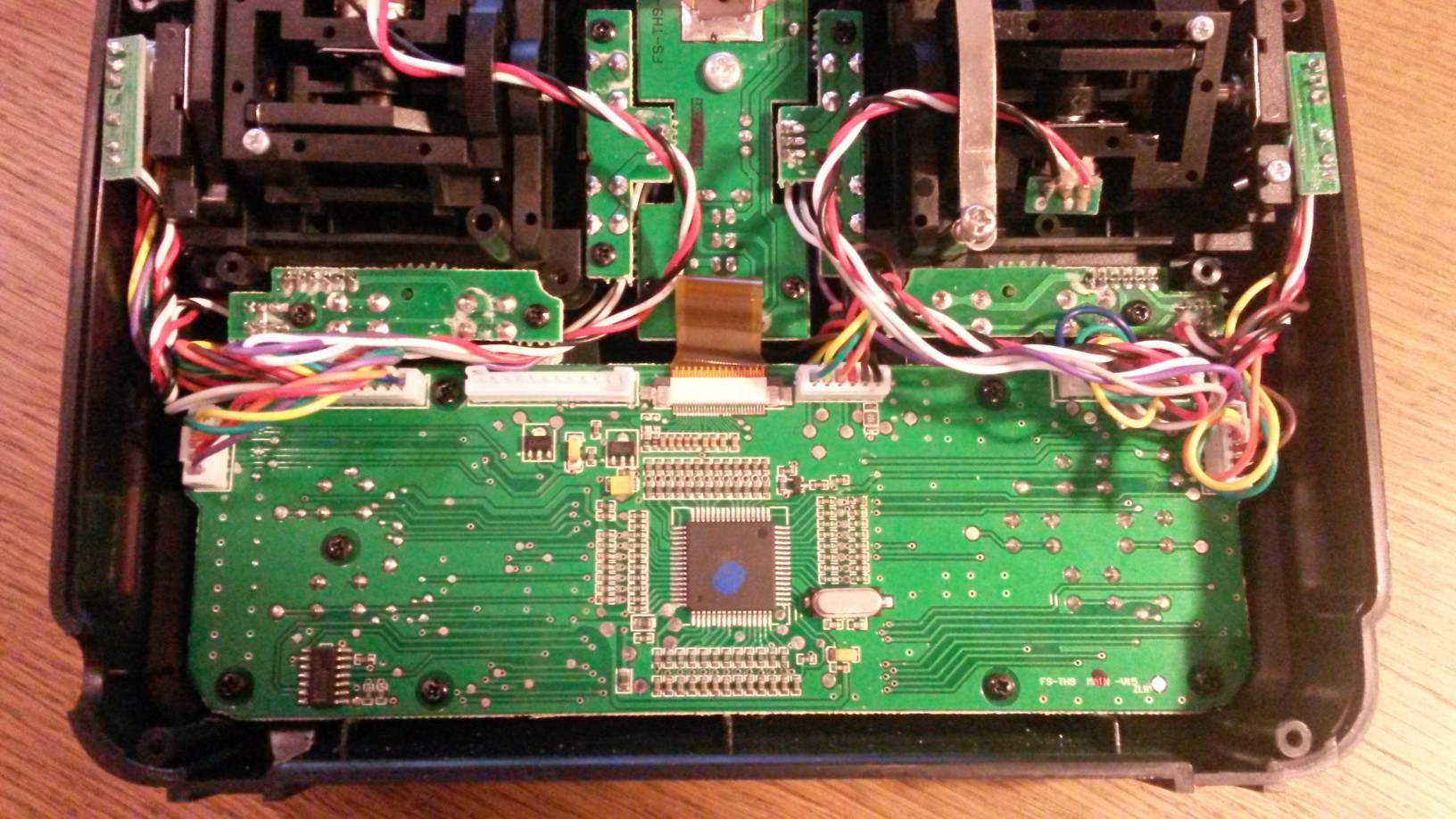
Hacking the remote control
04/08/2015 at 20:39 • 0 commentsThe next thing was to add an LED backlight because the display is difficult to read in the sun.
![]()
Unfortunately the firmware is not the best choice. But since it has an AVR Mega as main controller, there are a couple of alternative firmware projects for this remote control. I decided to put "er9x" on it. All I have to do is to solder an ISP plug on the right pins of the controller and take my AVR JTAG ICE3.
![]()
![]()
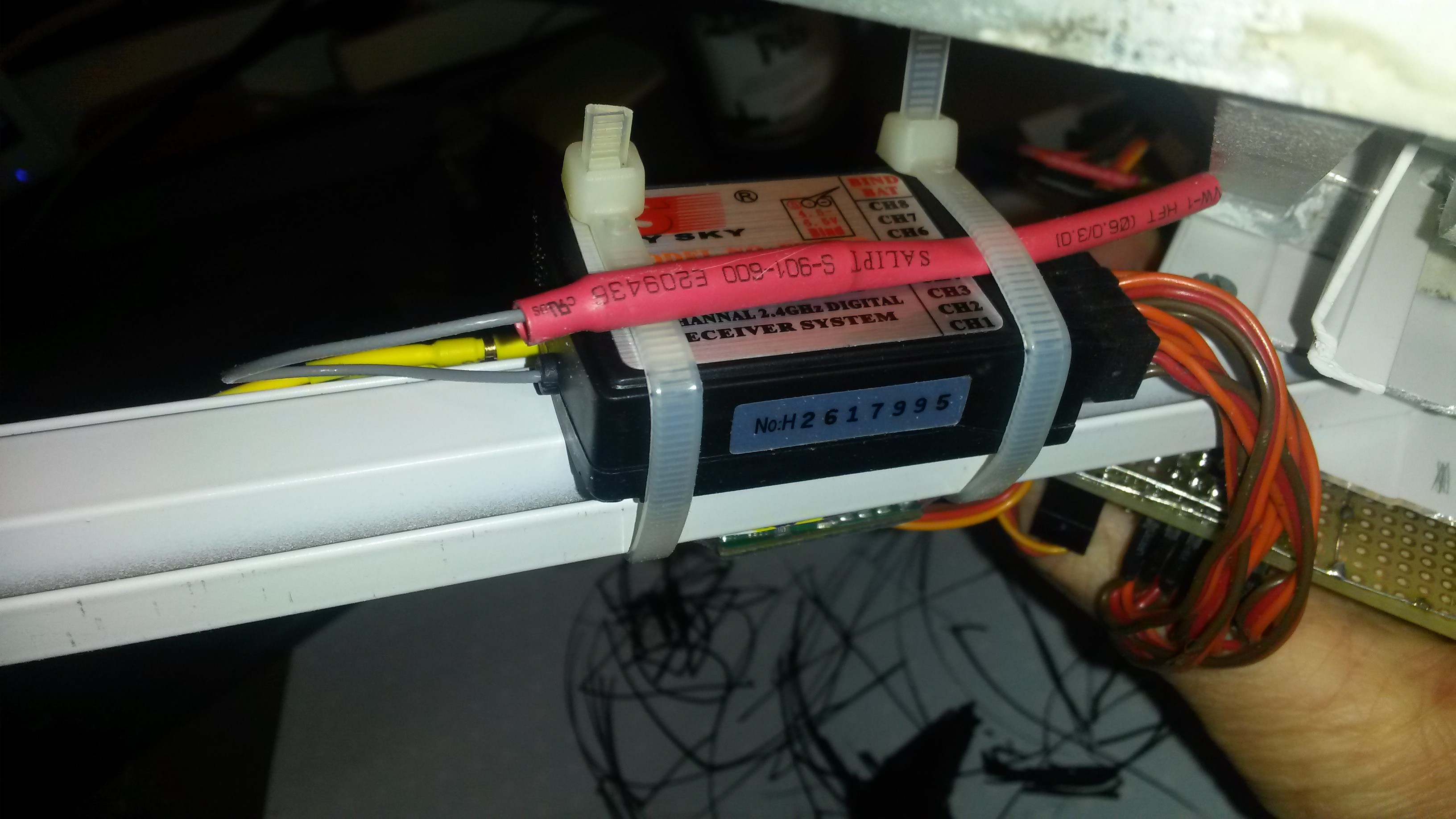
The FlySky TH9X is a relative cheap 8 channel 2,4GHz remote control. I payed 80 Euros for a brand new couple of a receiver and the transmitter.
-
Putting it together
04/08/2015 at 20:25 • 0 comments![]()
The 9CH 2,4Ghz Receiver
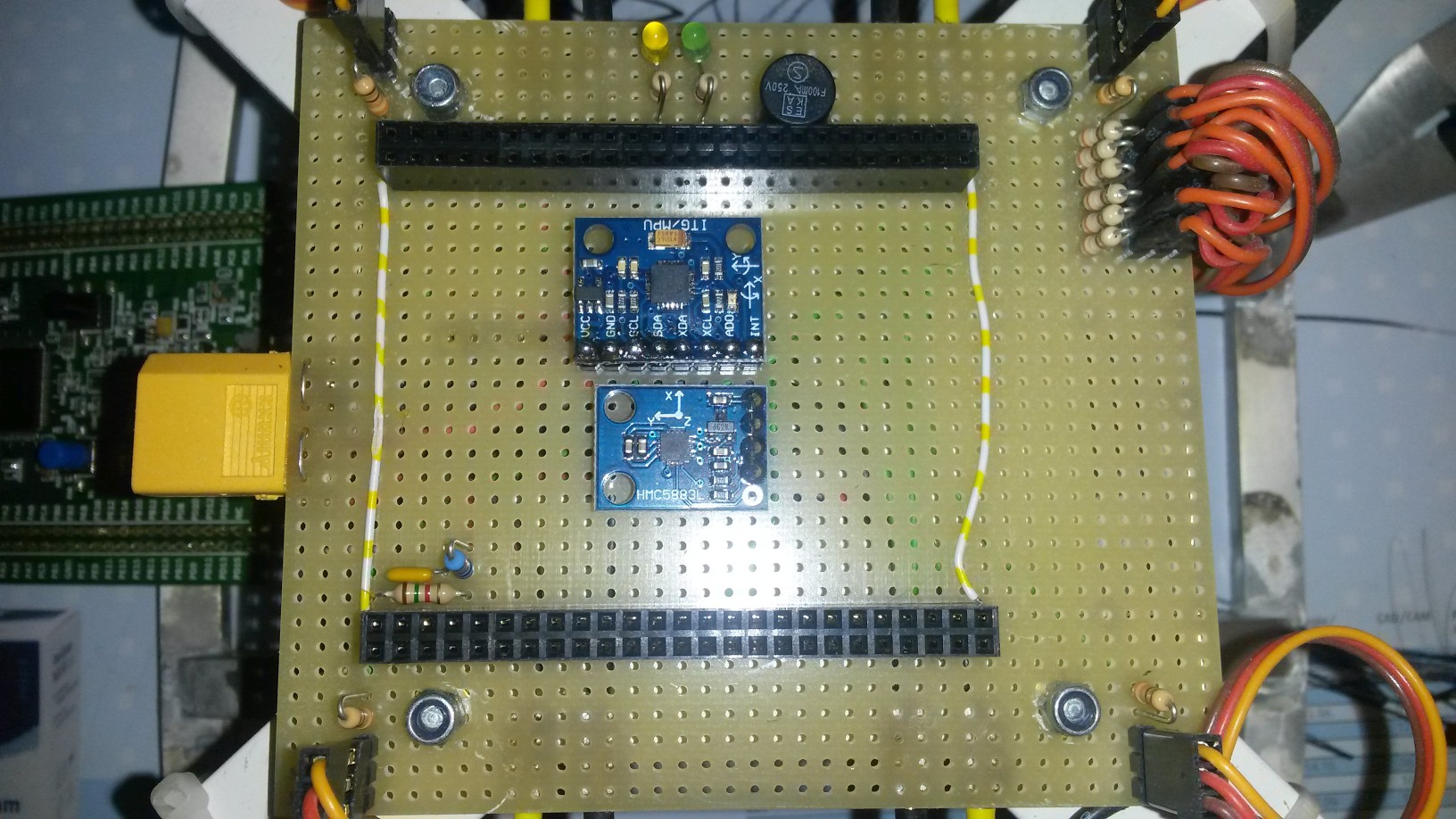
![]() Sensors...
Sensors...![]()
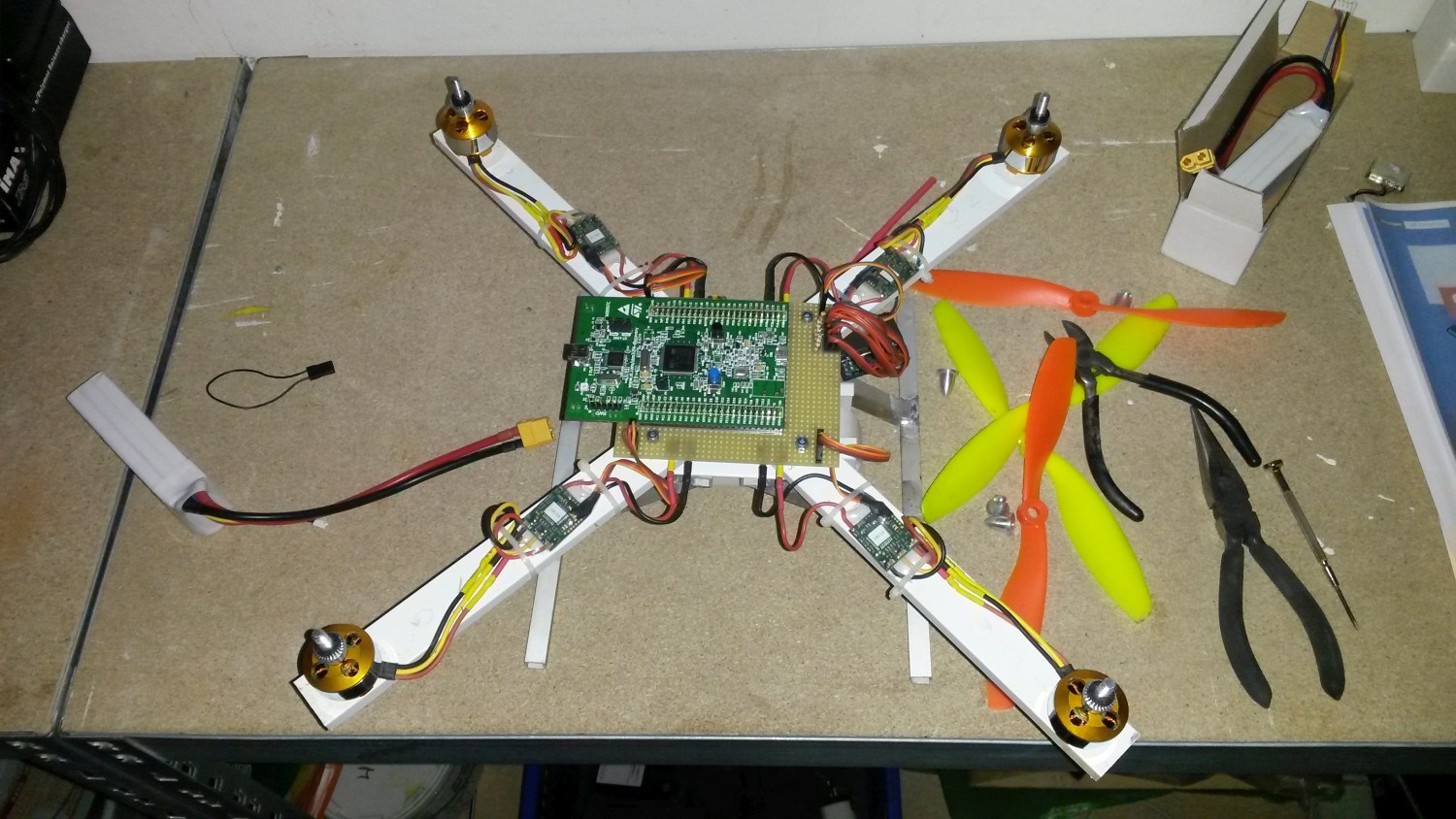
The ESC´s and the discovery are connected to the strip board which is also the power distribution board.
![]()
![]()
![]()
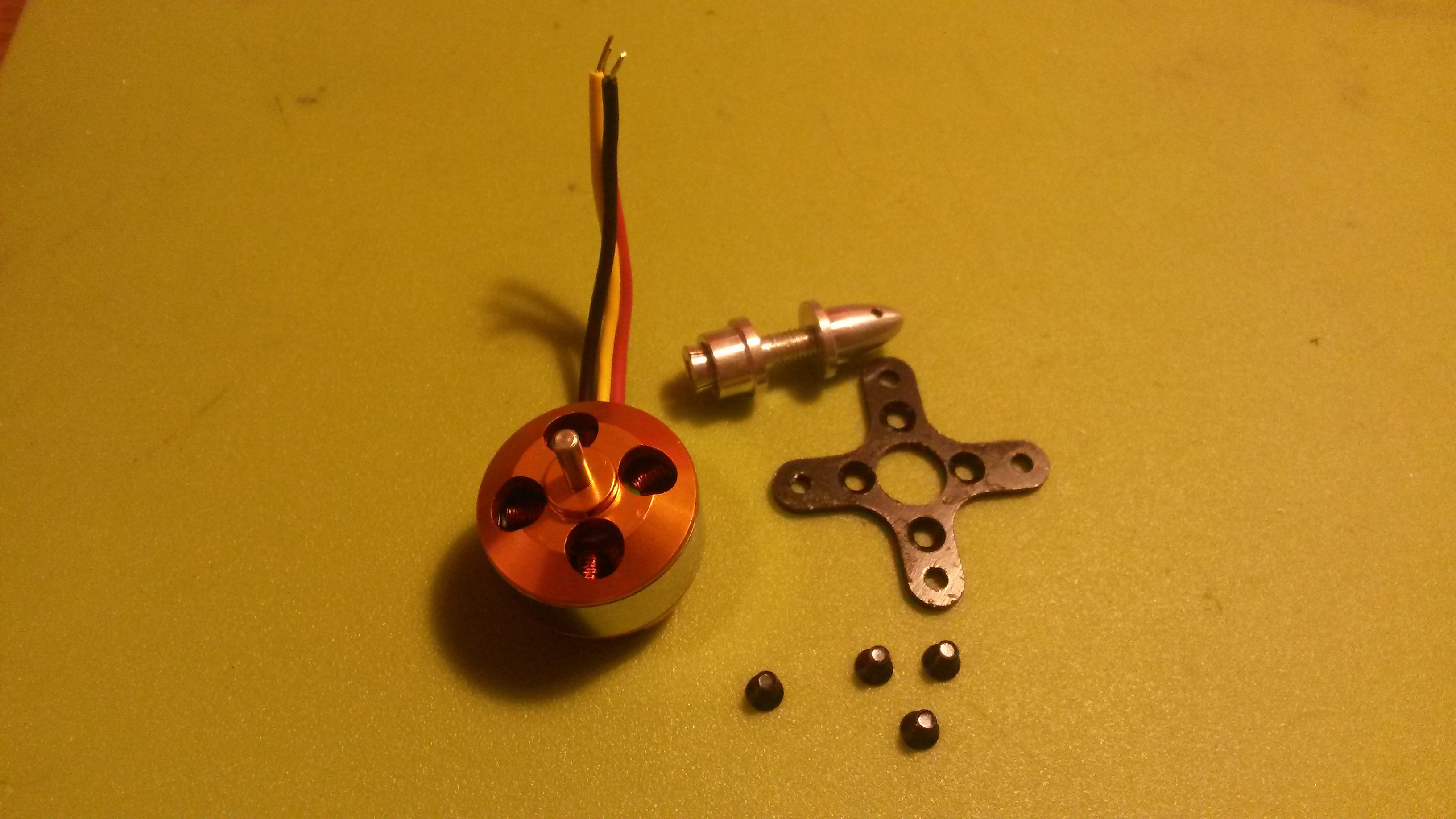
One of the brushless motors
-
The brain
04/08/2015 at 20:05 • 0 commentsThe MPU-6000 IMU (inertial measurement unit) board was not to get for a reasonable price.
Instead, I got an MPU-6050 breakout board for 2,55 € in China.
Unfortunately, the MPU-6000 and MPU-6050 are not 100% compatible. Thus, the MPU-6050, for example, no SPI but only I²C. With a small change at the Aero quad source is also not a problem.
#define MPU6000_I2C
#include <Platform_MPU6000.h>
#include <Gyroscope_MPU6000.h>
#include <Accelerometer_MPU6000.h>I've found it here
How to compile the Aero Quad-source code is shown here:
![]()
![]()
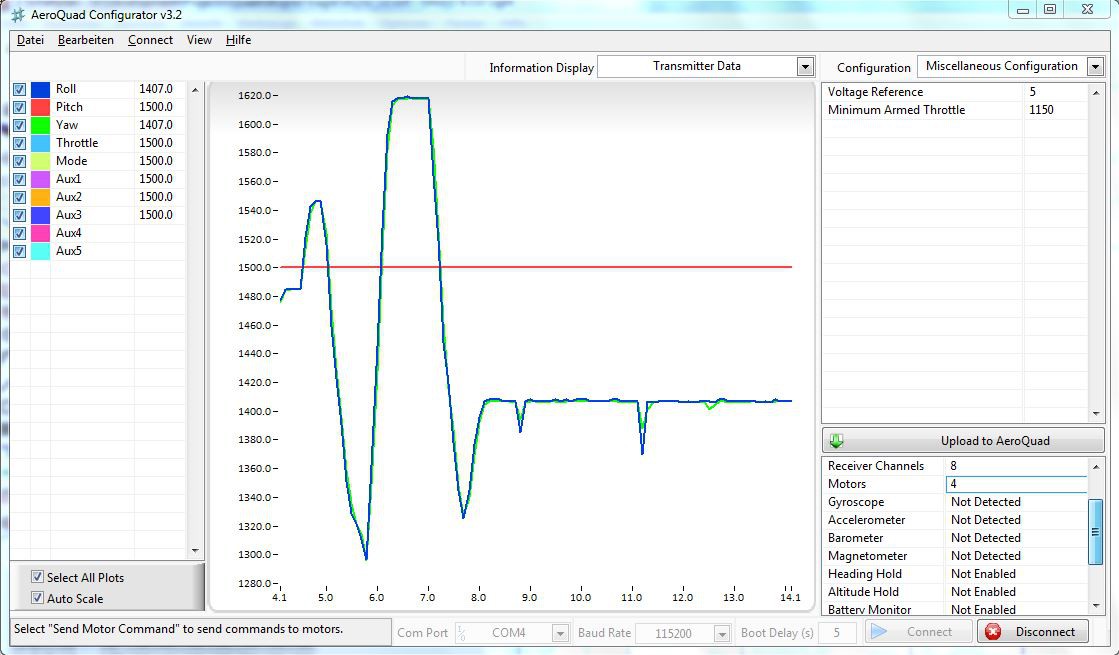
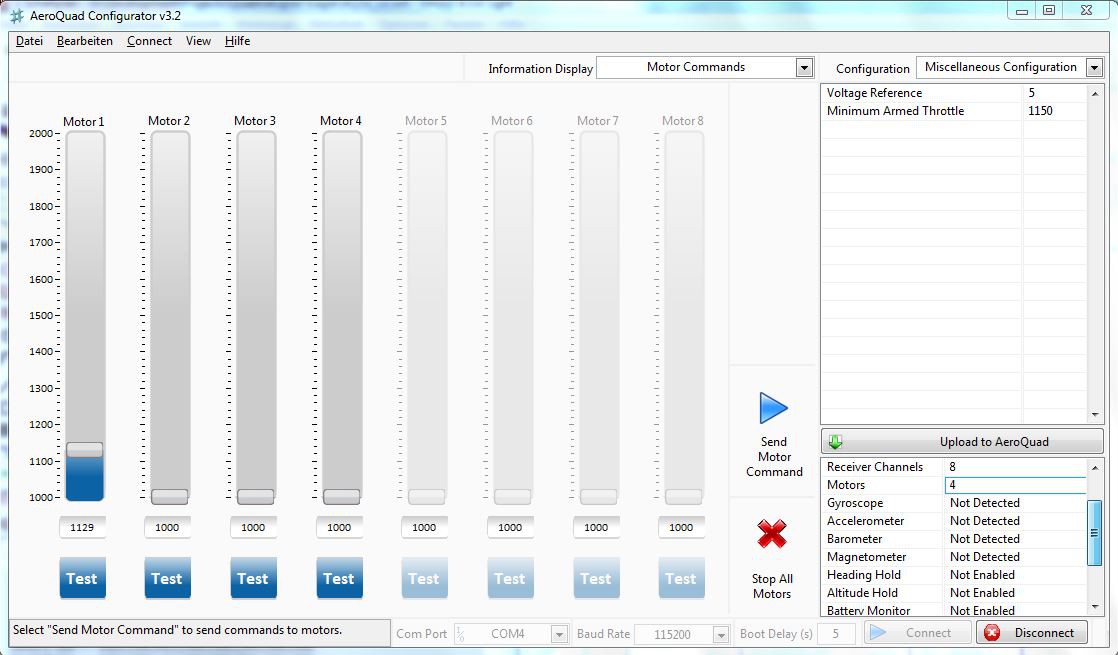
The Discovery board is connected to the "AeroQuad Configurator" through the USB/serial interface. With that software you can do several configurations and tests.
![]()
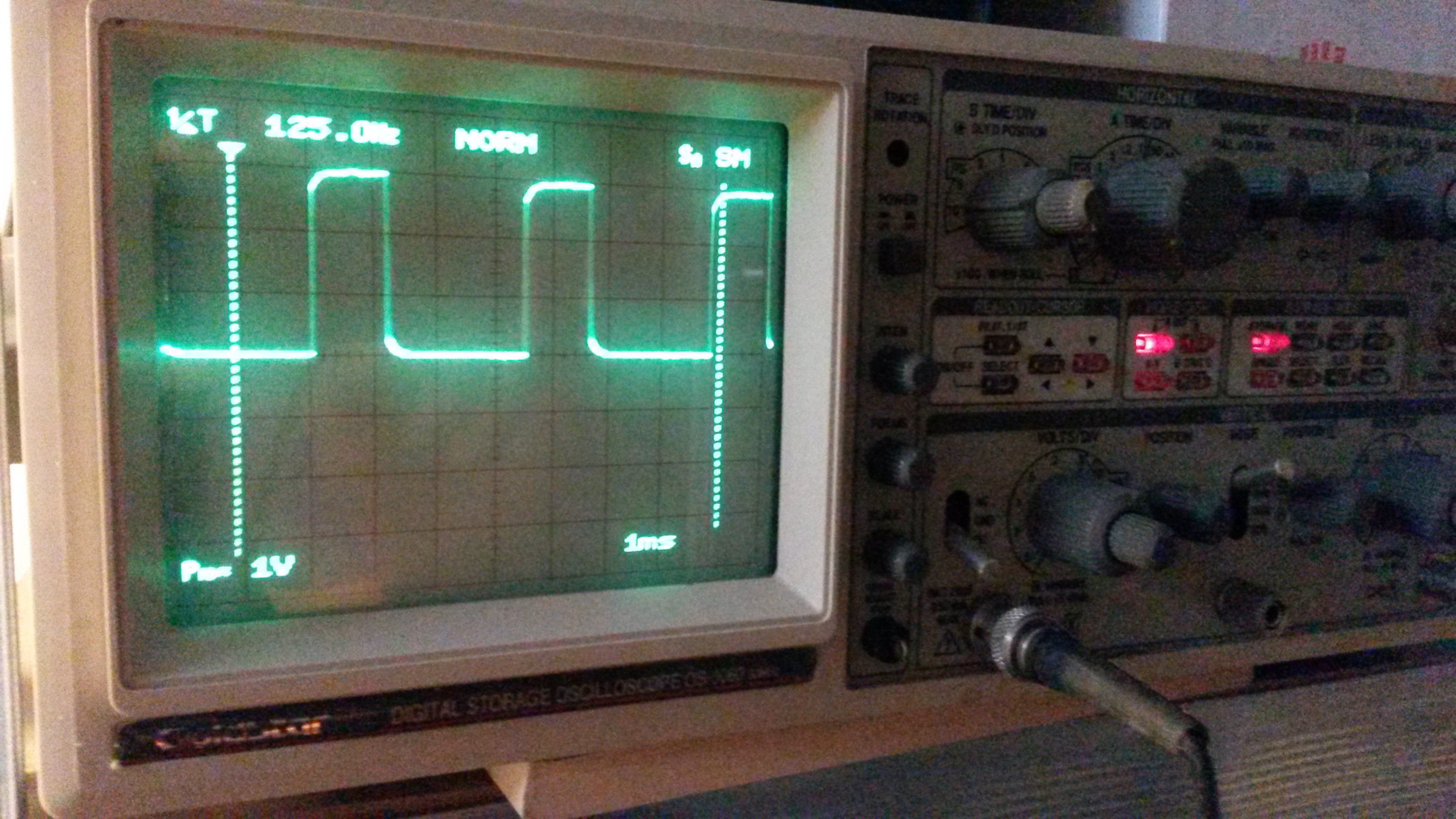
![]()
First of all I tried to simulate the remote control by my little frequency generator and looked what the motor output shows on the oscilloscope.
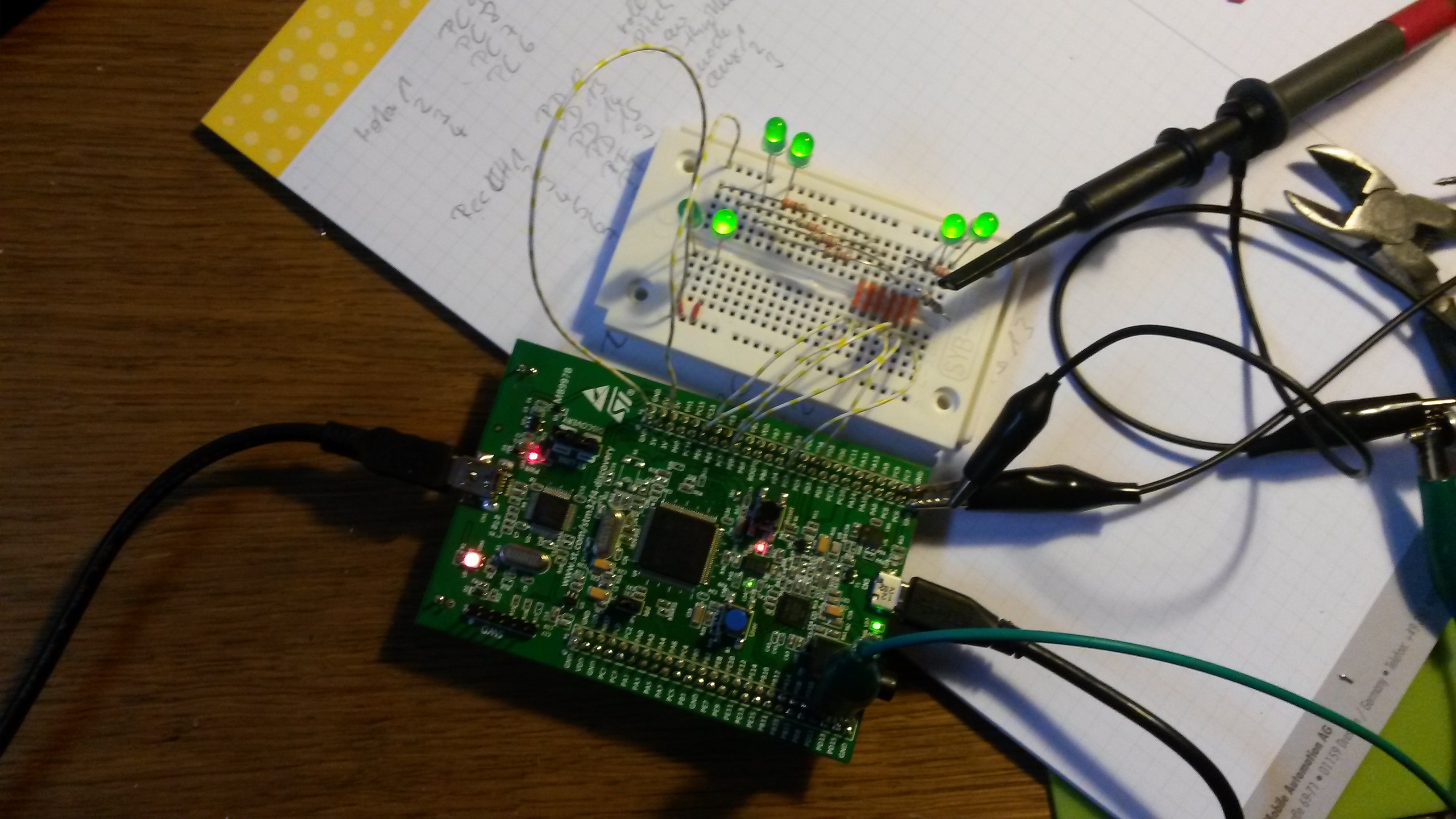
Fortunately by accident I found the the AEROQUAD Project. They developed an open source flight control for multicopter, running also on the STM32F4Discovery board!
Because i had a STM32F4Discovery board laying around, I wanted to use it as the flight controller for the quadrocopter.
-
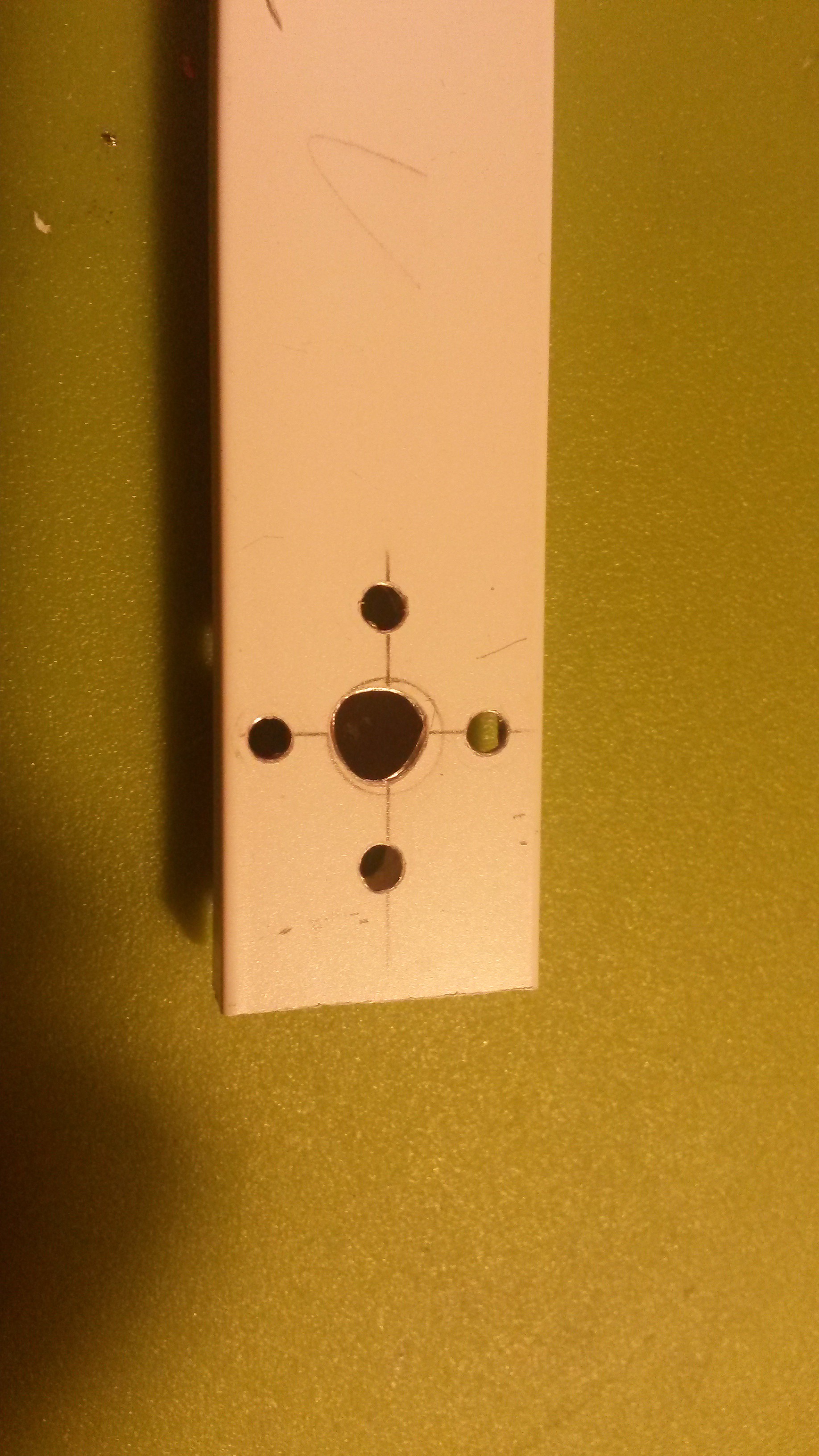
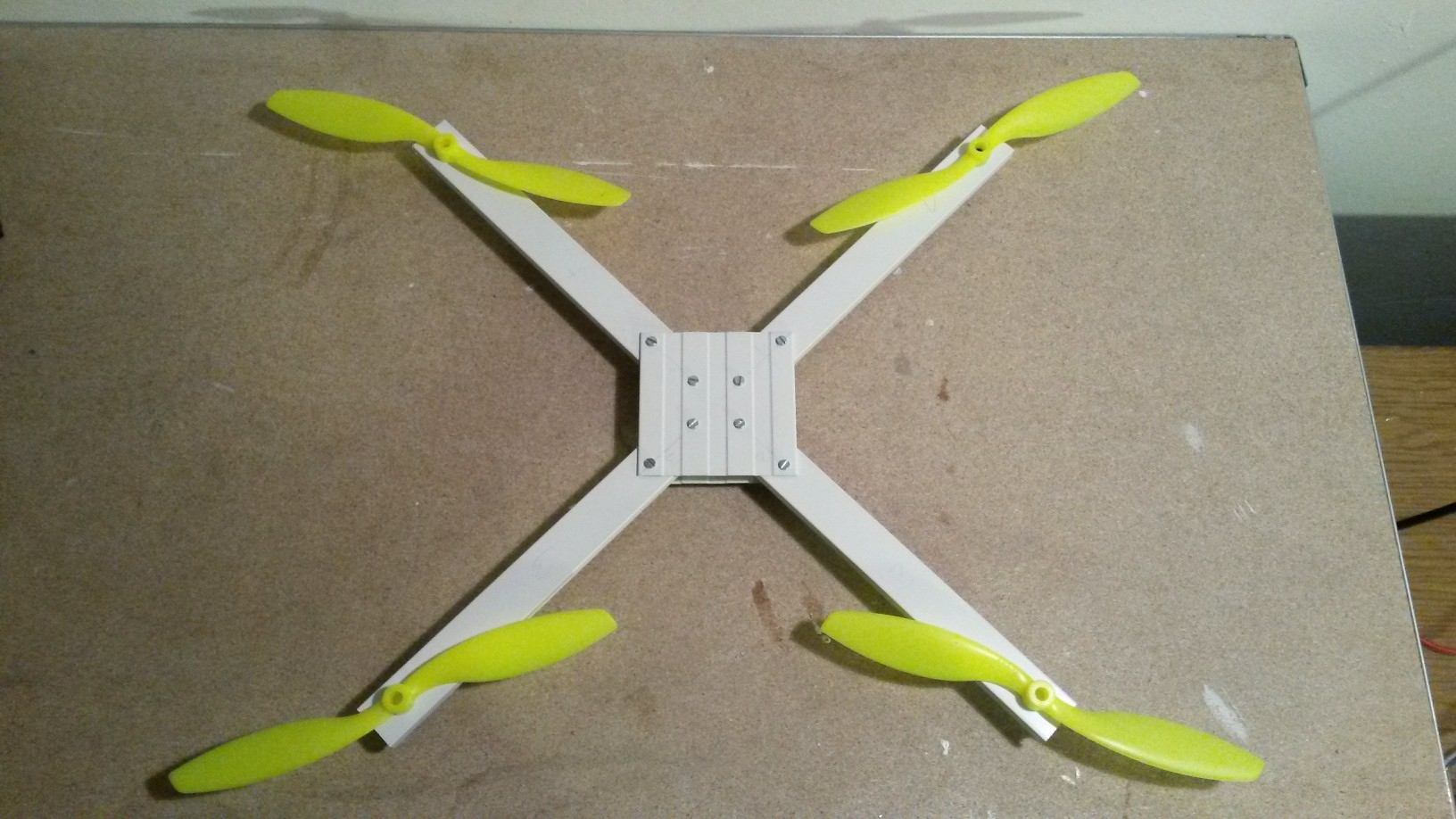
The Frame
04/08/2015 at 20:01 • 0 comments![]()
The frame is ready.
![]()
![]()
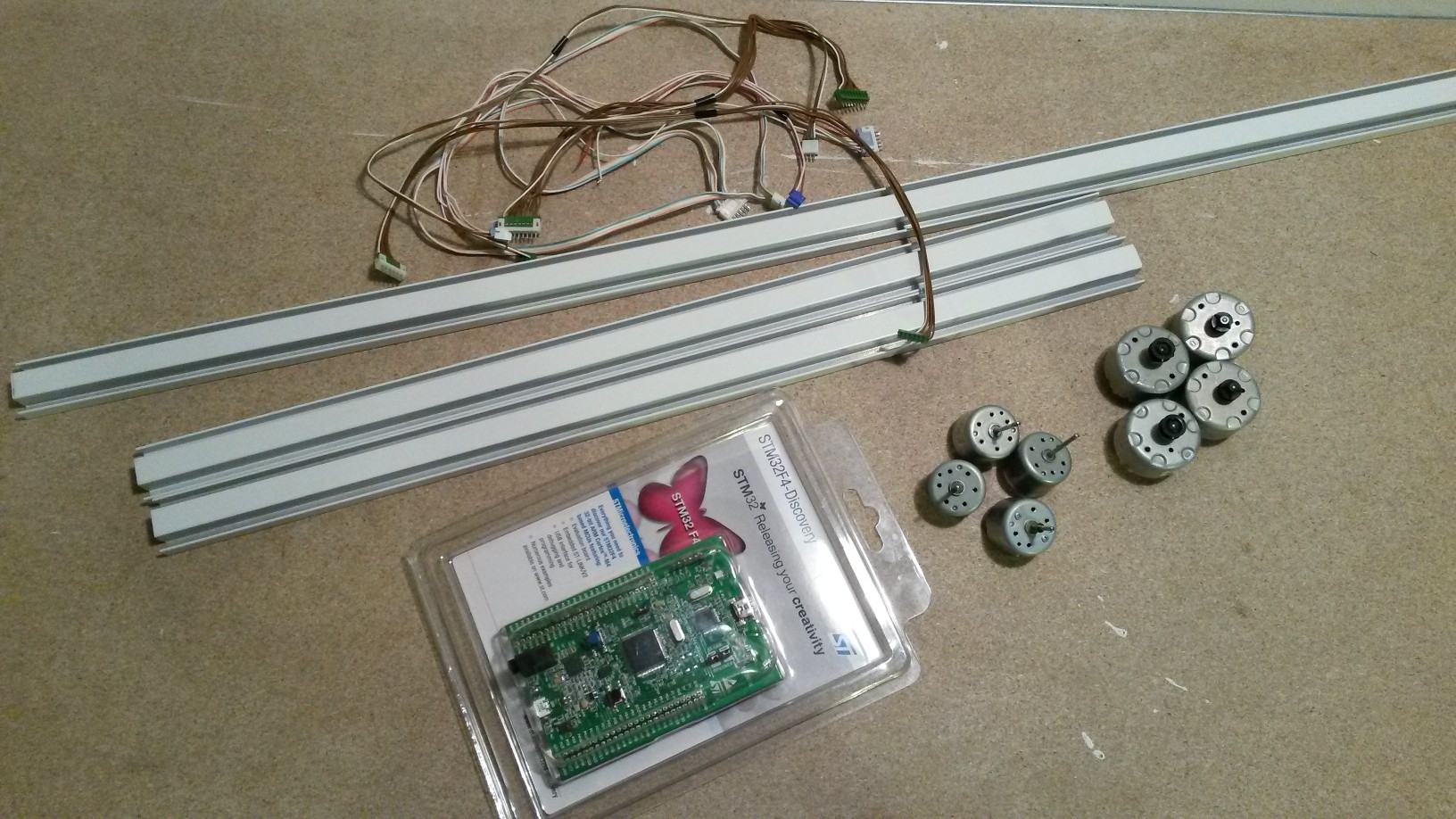
These parts should be the start
DIY Quadrocopter
Yet another Quadrocopter - built from scratch. Running on a STM32 evaluation board.



 Sensors...
Sensors...