Allen Mamaril
Allen MamarilHigh Level Design:
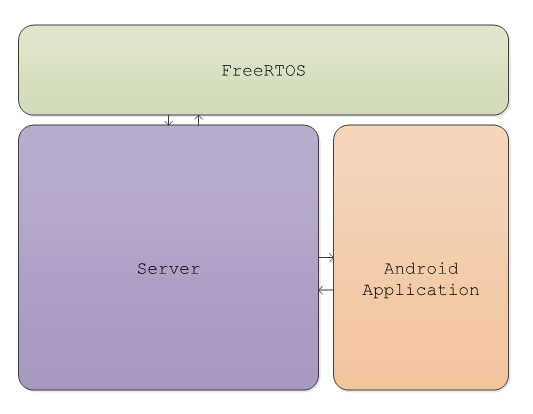
Software High Level Diagram:
Robot (Tank) Design:
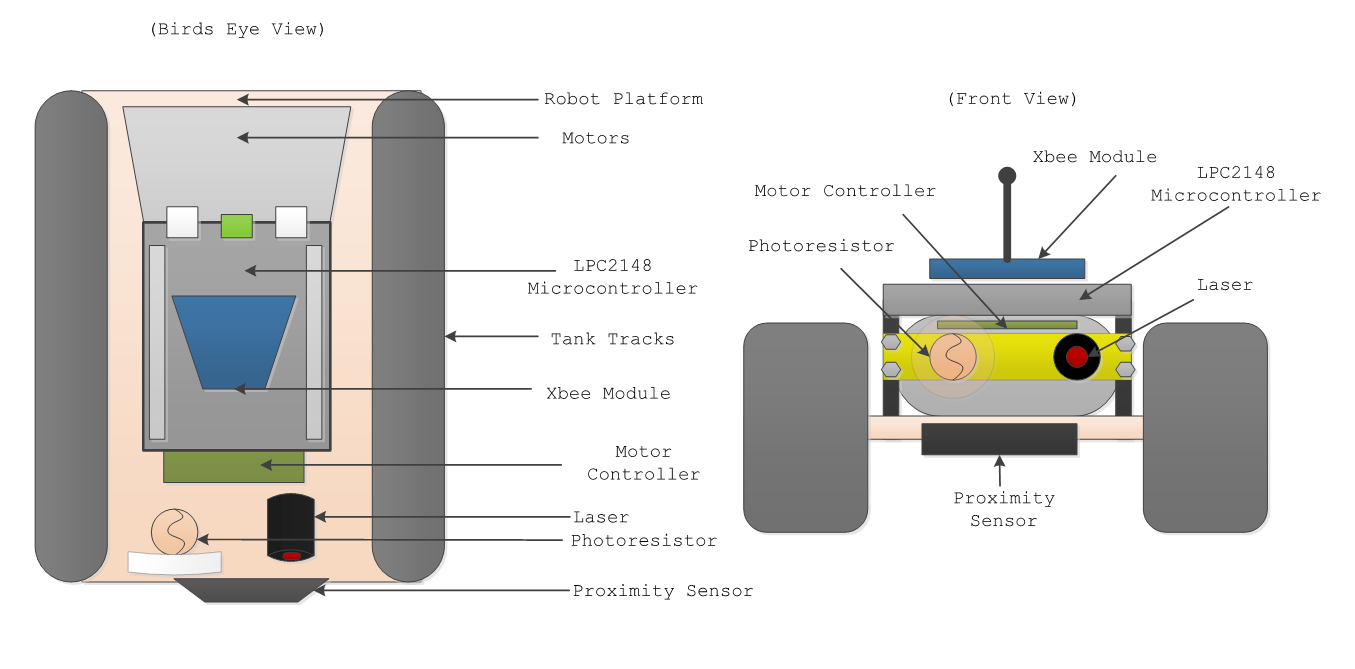
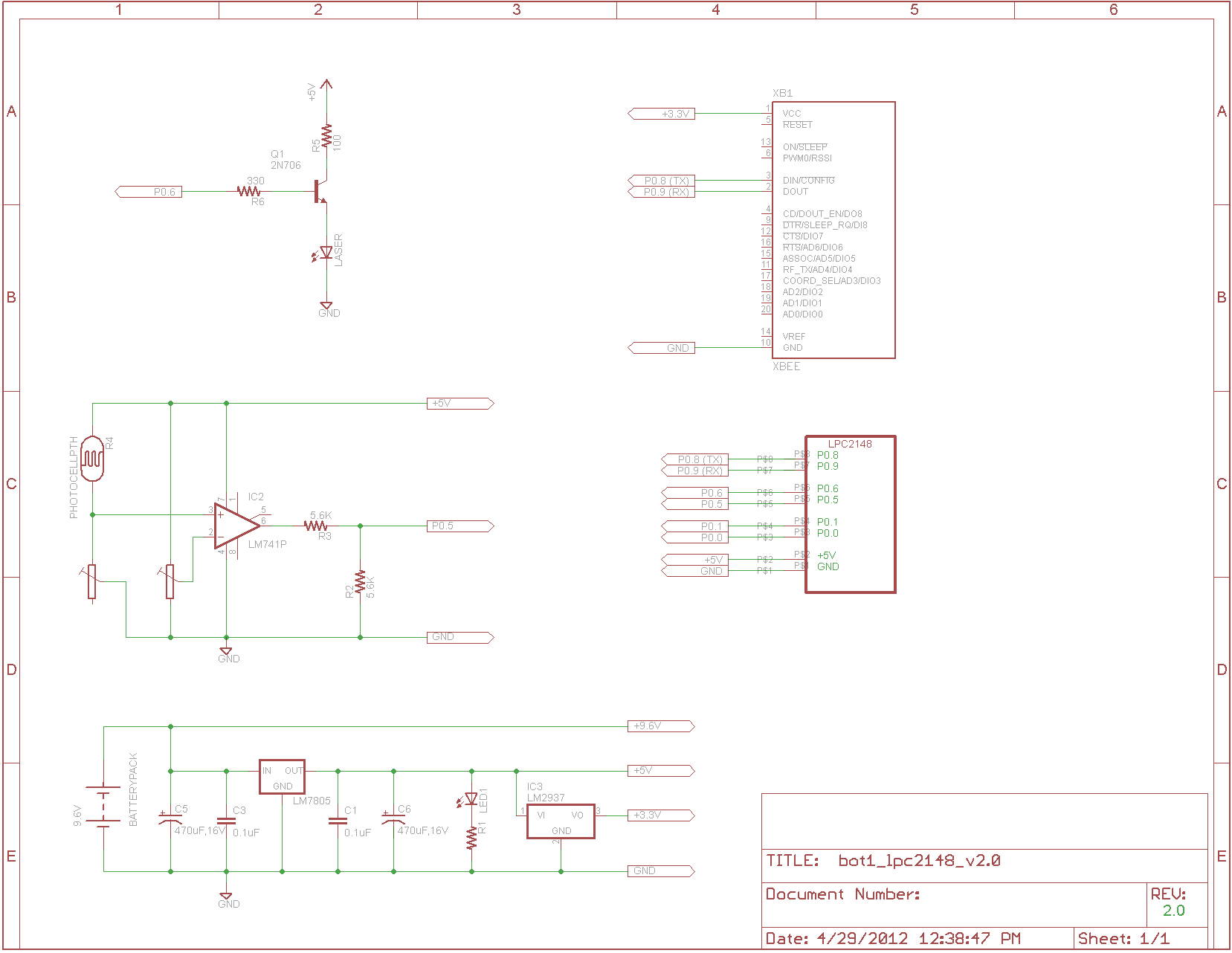
Robot Schematic:
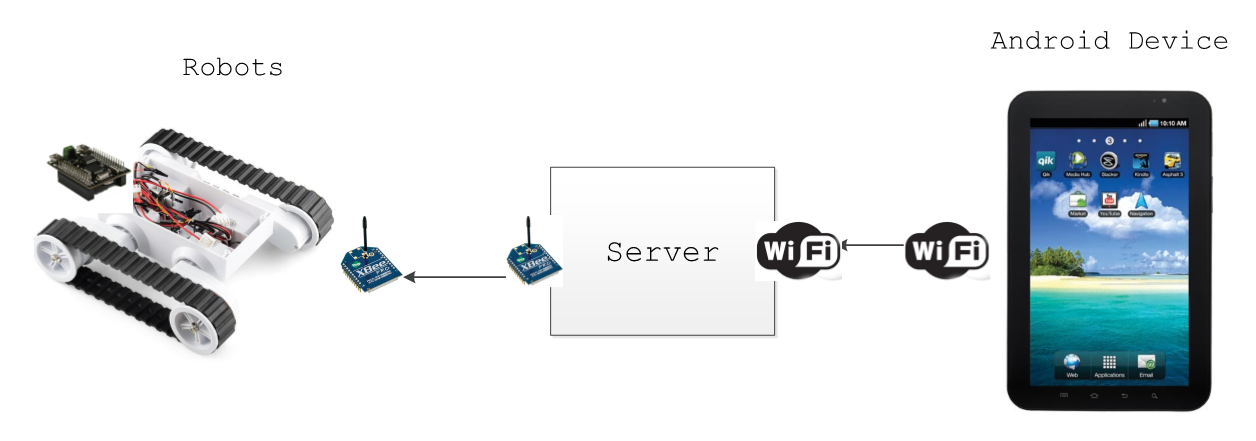
Developed a system for controlling robotic teams with mobile devices
Already have an account? Log in.
To make the experience fit your profile, pick a username and tell us what interests you.
High Level Design:
Software High Level Diagram:
Robot (Tank) Design:
Robot Schematic:


 Roger Cobra
Roger Cobra
 Fumi Okutsu
Fumi Okutsu