 Mike Rigsby
Mike RigsbyI printed a stronger joint piece and replaced the broken and damaged joints.
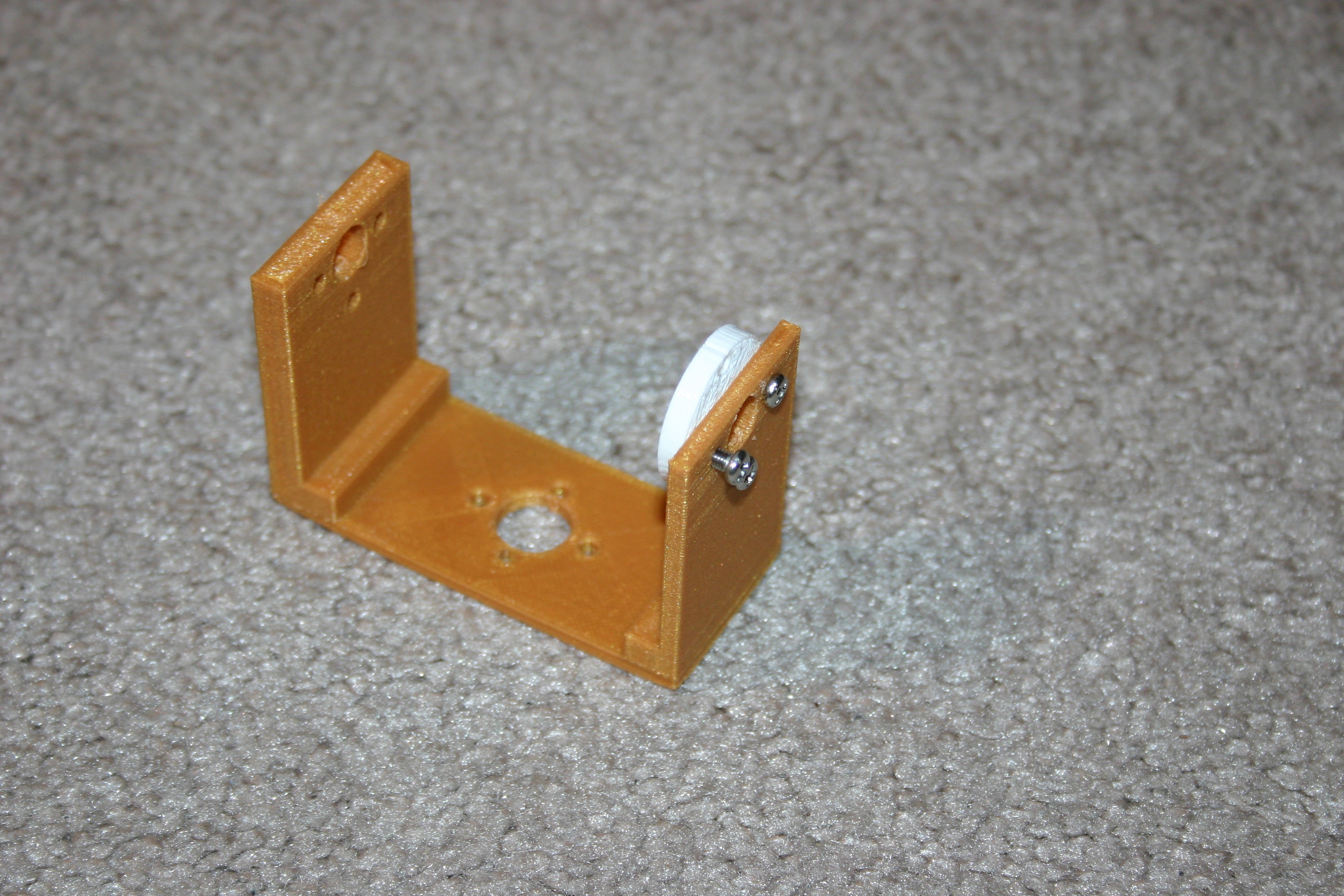
This photo shows the replacement of the "back bearing" for the servo motor.
This is the installation of the servo horn.

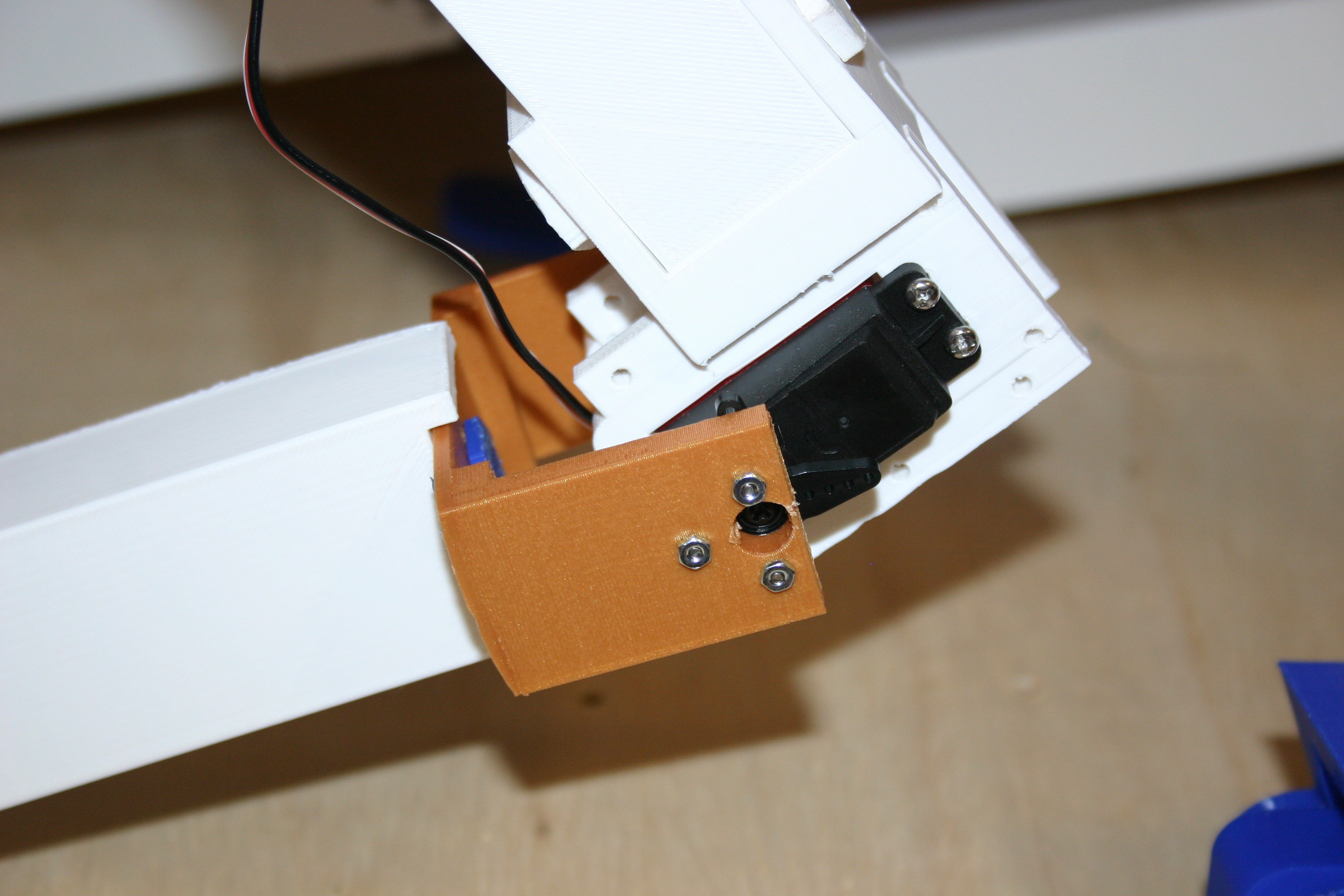
This is the attachment of the servo piece to the leg.

The servo attachment piece has to be fastened to the servo motor using the servo screw.
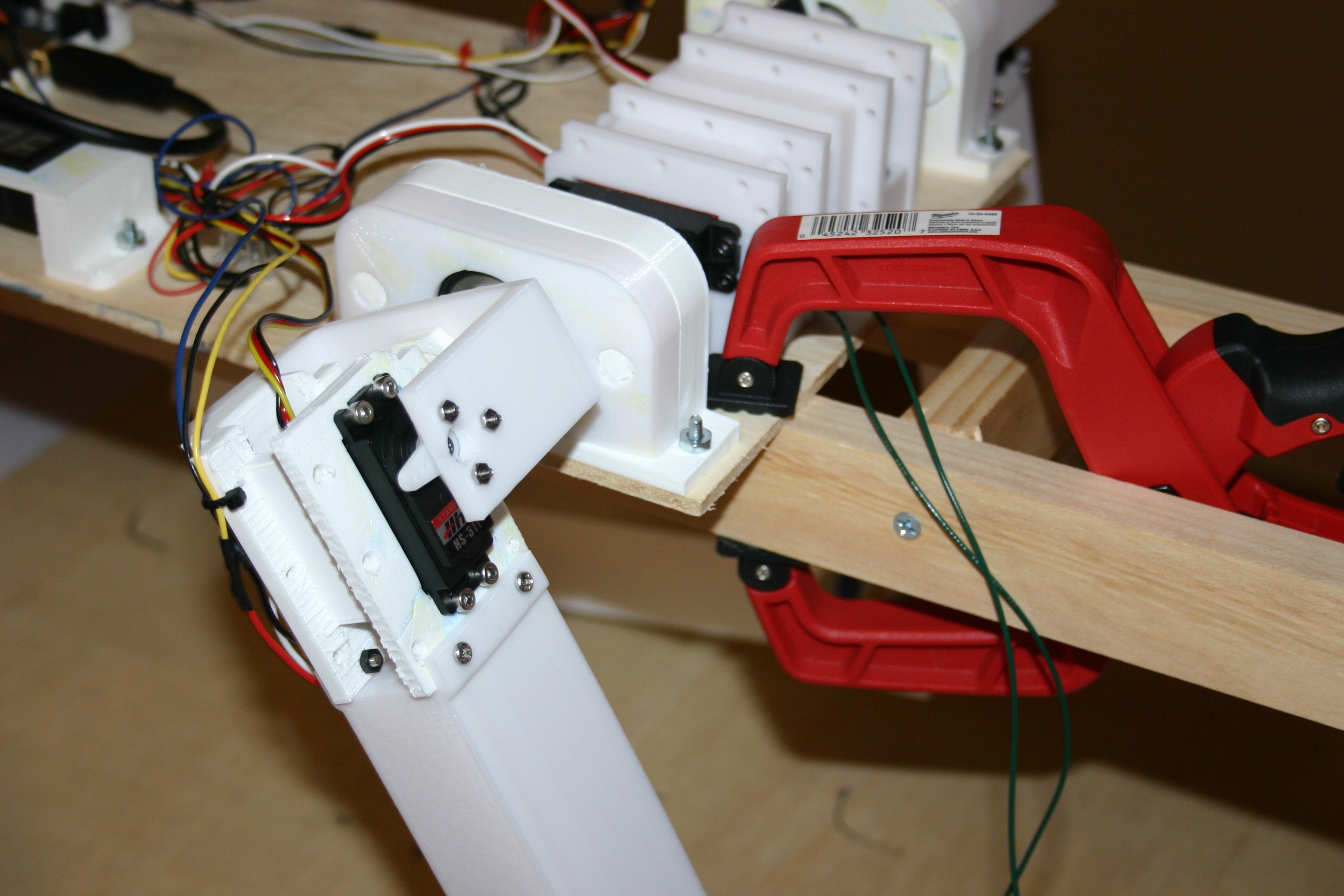
Next, I made a wider wheel, one that will not turn, to be in the foot position. Part of my trouble with standing involved the foot "moving around" instead of the body lifting.

For test purposes, I clamped the body to the "hanging support" so that the body could not be lifted.
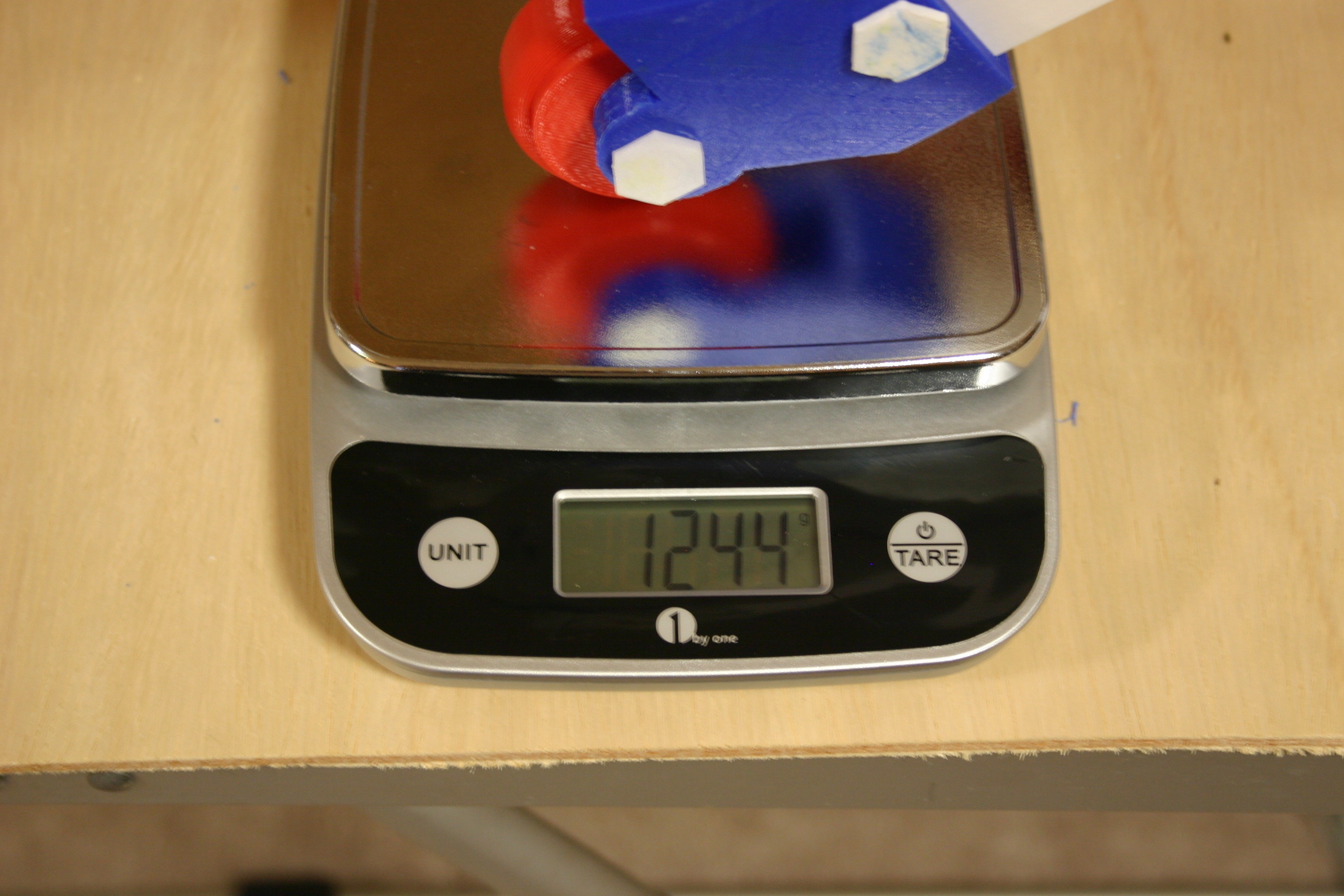
Next, I "asked" the leg to push as hard as possible. The result was 1.24 kilograms. At least under some circumstances, four legs working together should be able to lift about 5 kilograms. The body is about 1.5 kilograms, so there should be enough push to get off the ground.
I probably need some feedback and better software, but things are progressing.
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.