 roboteurs
roboteursAs an Update, and based on popular demand ,we added the SlushEngine: Lite - A simpler version of the SlushEngine. It's a lighter version of the Model X. It's meant for smaller stepper motors and lower current levels. It is designed to handle most DIY 3D printer systems and small scale stepper CNC machines.
It's a lighter version of the Model X. It's meant for smaller stepper motors and lower current levels. It is designed to handle most DIY 3D printer systems and small scale stepper CNC machines.
SlushEngine: Lite technical specifications
- Controls up to 4 bipolar stepper motors
- Max 3.5A
- 1-128 micro stepping capabilities
- Integrated motion engine
- 4 limit swith headers
- 16 logic level general purpose inputs and output headers
- UEXT expansion connector
- Raspberry Pi fused power supply
//
- This is a project that we made live on our Kickstarter (April 17, 2015) - If you like it, please let us know, and of course back us! - WE WANT YOUR CRITICAL FEEDBACK
- *Everying will be shared openly (ie. Schematics and Code) once our Kickstarter is done on May 7, 2015*
//From our Kickstarter campaign//
About this projectThe simplest stepper motor driver you'll ever need!
Do you have a complex robot or automated project that you just aren't getting done? Looking for a motor driver that's simple to set up and easy to use?
We've developed the SlushEngine which is a smart stepper motor driver that works with theRaspberry Pi and many other devices (ie. Beaglebone and Arduino). By connecting the Raspberry Pi to a network of motor drivers, we can control the motors in realtime without overloading the Raspberry Pi.
SlushEngine: Model X
- Uses a simple Python library
- Compatible with a large number of stepper motors
- Additional features to support your robotic and automation projects


Programming the SlushEngine
The original idea of the SlushEngine was to keep it simple. We wanted it to be as easy as possible to program the board. One of the simplest and most powerful programming languages is Python. It's difficult or impossible to have Python run on standard microcontrollers, so we used the Raspberry Pi to execute the Python code and communicate with the smart motor drivers on the SlushEngine.
We can now program the SlushEngine in 3 simple lines of code.

The above sample is the simplest implementation of the SlushEngine driver. It sets up a motor with a default configuration, then moves backwards 400 steps. When it moves the motor, it also incorporates an acceleration and deceleration curve, to ensure smooth operations.
For more examples, we'll be updating our Youtube channel with some video samples.

SlushEngine: Model X technical specifications
- Controls up to 4 bi-polar stepper motors
- Max 7A / motor
- 9-35 V DC operating range
- 1-128 microstepping capabilities
- Integrated motion engine in stepper driver
- 4 limit switch inputs
- 4 general purpose industrial inputs
- 4 general purpose industrial outputs (3A / 24V)
- 8 additional logic level I/O
- Thermistor temperature sensing
- UEXT expansion connector
- Raspberry Pi fused power source
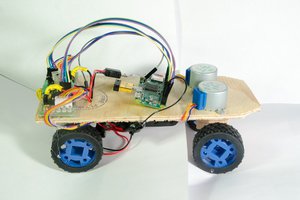
Demonstration of the SlushEngine's Motor Control
SlushEngine Open Source

We want the SlushEngine to be a continuous project, and to do this we need strong feedback from the community. The best way to get this is to make the entire project Open Source. Once the Kickstarter has been completed, all hardware design and software files will be released as a Git repository to the public. So if you want to implement the SlushEngine software or hardware in your own project you can. Backers will get early access to this repository. This repository will include:
- KiCad board design and schematic files
- SlushEngine Python and C++ drivers
- Examples including G code interpreter, basic movement, delta robot controller, and IoT connected examples



 Nancy Yi Liang
Nancy Yi Liang
 borazslo
borazslo
Good call on the lite version - it's exactly what was making me hesitant on pledging. Your model X I think was a bit overkill as is. This is something more useable and worth buying