vcazan
vcazan-
Going higher
06/14/2015 at 14:13 • 0 commentsIt has been a few weeks since my last project log, so I thought I would share with you some updates to this project.
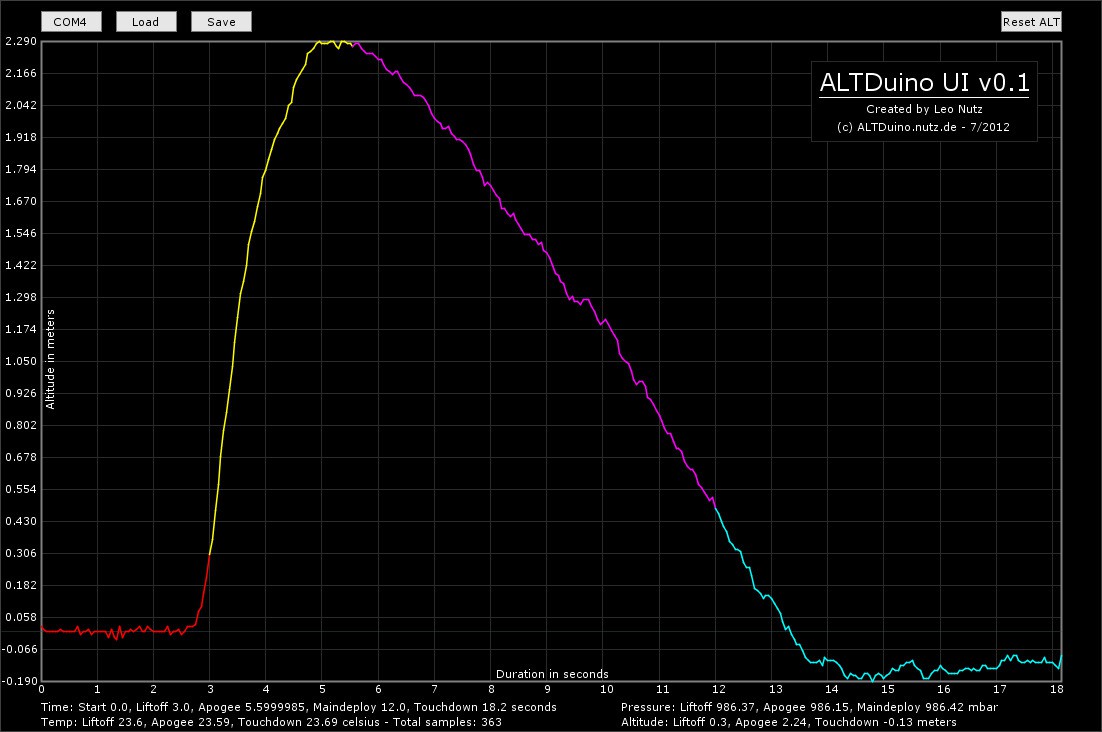
Since my initial launch, I launched another 3 rockets and gathered more data using my new protocol. This proved to be successful and has inspired me to create an interface for displaying this data after the launch. I will take my inspiration once again from the AltDuino project that does a wonderful job of displaying all data in one easy to read view:
![]()
Another update is that I purchased a much larger rocket to go higher in altitude. I will try and maintain the weight of the sensor unit the same though to ensure maximum altitude can be achieved the first launch.
![]()
As for the electronics, I made a mistake when purchasing EEPROMs and bought the 2kb version instead of the 256kb version. These new ones have finally arrived and I will be saving all the data that has been transmitted to the external EEPROM as well to ensure that if data loss occurs during launch I can retrieve it after landing.
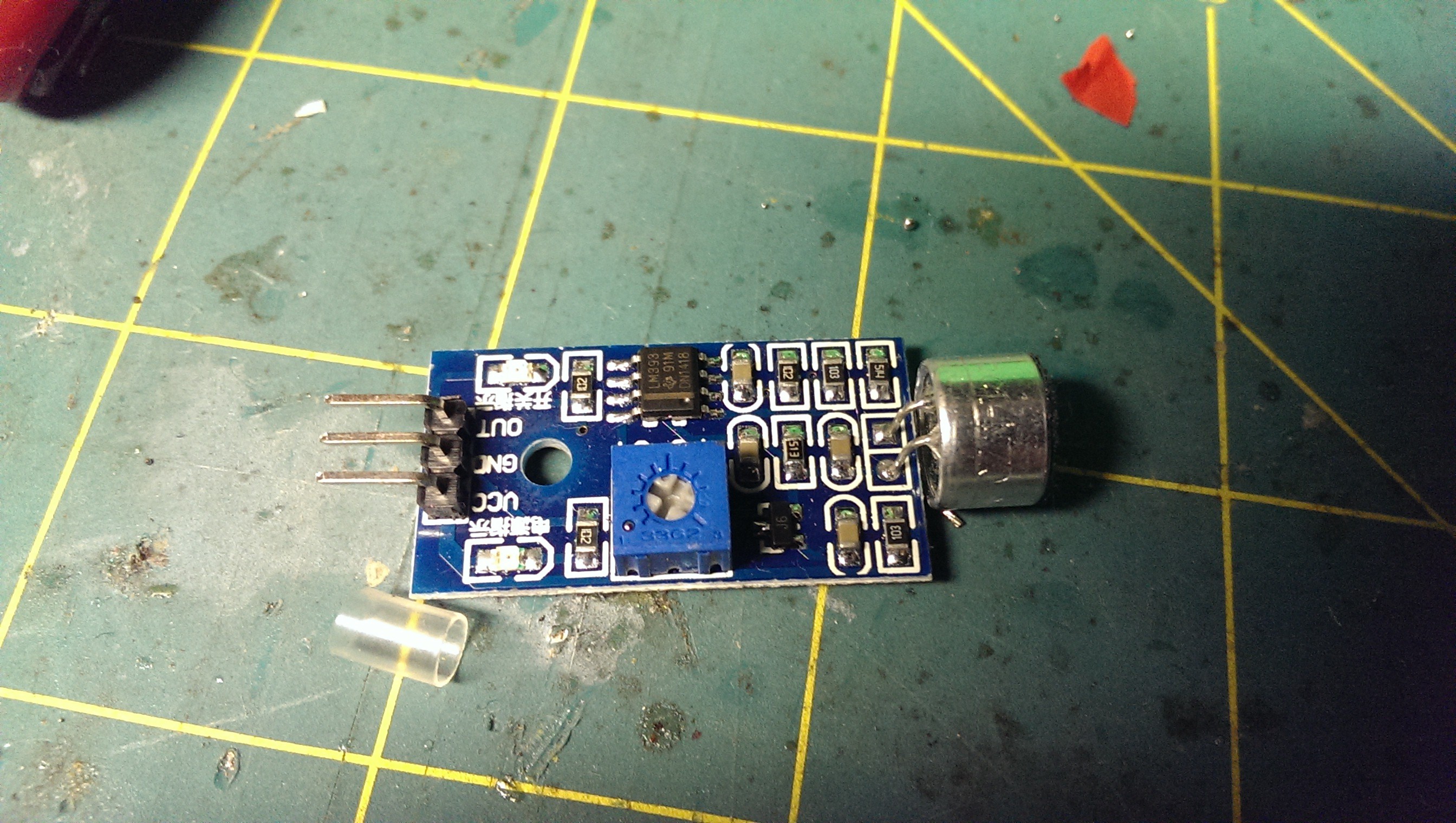
Another feature I am debating is an auto launch command that would ignite the fuse with a serial command sequence. I also wanted to have a way to verify ignition has occur ed so I purchased a tiny mic that will measure sound. It is very loud when the motor launches so I will be able to "confirm" launch with that sensor and my baro. This may or may not be legal so I will double check to make sure.
![]()
There would be a ground based launch station with a 12v boost that would take a signal from the arduino to launch, but I will need a way to unteather at least two wires from the rocket and launch station when launch occurs, so I am still working out this.
I plan on launching the larger rocket within the next week or so and I will post pictures and data when I do.
-
Firmware Updates v0.2
05/10/2015 at 22:59 • 0 commentsAfter the success I had yesterday with my data link and flight sensor I really wanted to spend some time reworking the code.
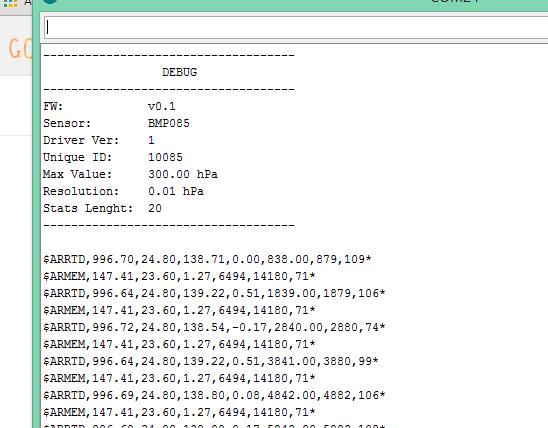
I developed a simple yet effective communication protocol much like GPS units use with a XOR checksum at the end to verify data.
Here is a picture of the debug screen now after the update:
![]()
-
Launch Day M1
05/10/2015 at 02:58 • 0 commentsToday was launch day for our M1 rocket. We had three successful fights and had a live data link the entire time. On our last launch the nose cone became disconnected from the chute and free fell back to earth but stayed on and transmitted data the entire time.
I will do a complete writeup of the results tomorrow and I have pushed the code we used for this test on github here: https://github.com/vcazan/AltiRocket
Flight 1: 119m
Flight 2: 155m
Flight 3: 110m
Here is a quick graph I generated during the test and a few pictures from today.
![]()
![]()
AltiRocket
Arduino based rocket telemetry unit with 2.4Ghz downlink and eeprom storage