 Redtree Robotics
Redtree RoboticsToday's log will bring you up to speed with the progress we have made up to until now from a hardware point of view (software side coming soon).
First, way back in 2011 when we were trying to figure out what was possible, we started to play around with a GumStix. It was attractive because we wanted built in wireless and a decent processor at the time (also fairly low power).
We quickly found out that to make the "plug-and-play" type of robotics we wanted, we would need a Field Programmable Gate Array (FPGA). This is sort of a software defined processor. It's useful in this project so that we can reconfigure the circuitry and connect hardware using different interfaces (I2C, Canbus, UART etc.) without a ton of external circuitry.
So after getting some of the code running on the Gumstix and convincing ourselves that this was worth pursuing we started on selecting a new platform that had an FPGA and some of the other features we wanted.
We ended up deciding on the MicroZed because it had a dual core ARM-a9 and an FPGA built-in. There also seemed to be a growing open-source community around the product, which was perfect since we also want to open source as much of our product as possible as well.
While it does not come with built-in wireless, we found a module called the TI Wlink8 which has WI-Fi and Bluetooth and had lots of documentation on getting in running with the microzed (and AVNET has been really helpful in working closely with us to get it up with our own board we developed).
After one hardware iteration, we had a fairly large footprint and the Microzed sitting on top of the board. In our next revision, we shrunk a little bit while sorting out some of the previous problems. The I/O connectors are now moved off onto external cards that would plug into the side of a case.
In our final production model, we are actually eliminating the Microzed completely and just utilizing the Zync 7010 processor and RAM (not sure how much yet, but likely more than 1GB).
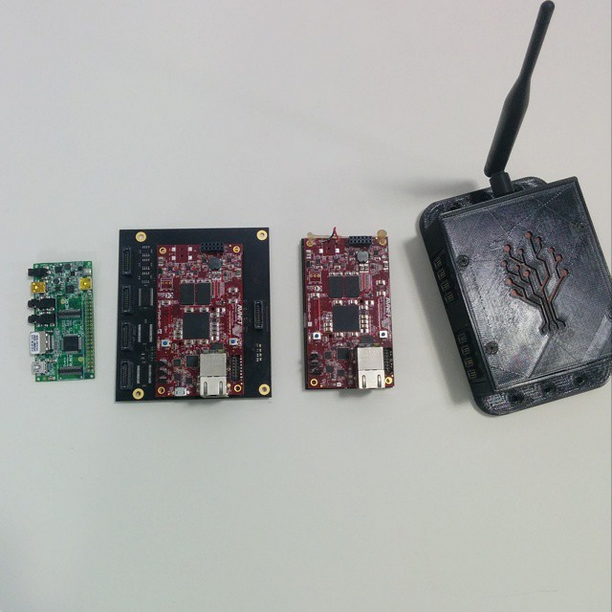
The above picture shows the evolution of the Redtree Hydra from around 2011 when it was mostly software running on a Gumstix to today where we are on revision 3 of our hardware and on the way to a manufactured production model sometime towards the end of this summer. The first version of our hardware was produced in April 2014, the smaller version in October 2014, the case in December 2014. We produced 15 of the most recent prototype which are being loaned out to early adopters at Universities and companies around North America. Our "manufacturing-ready" final version is expected in mid-to-late summer of 2015.
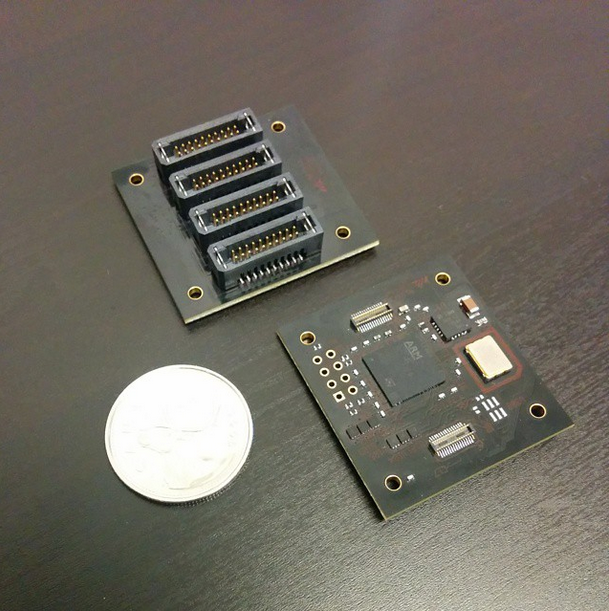
Above is a picture of the I/O boards on the side of the case that let you connect sensors, motors and other components to the Redtree Hydra. Eventually we think we can get the entire system down to this size or smaller so that people can incorporate the entire "chipset" into their own designs for mass production while retaining all of the features of the Redtree Hydra.
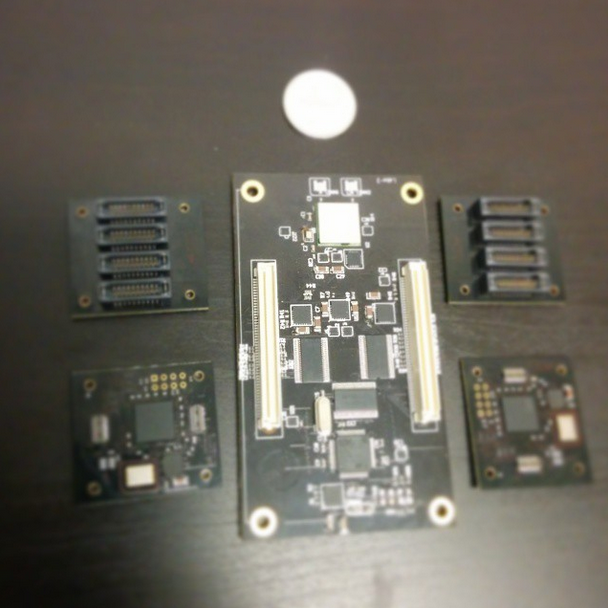
This is the entire system - or what's in the box. Our final production model will eliminate the Microzed that sits on top of this prototype.
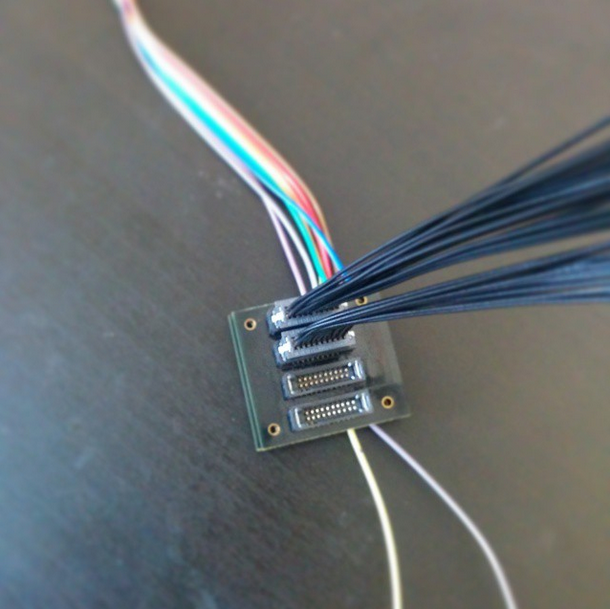
This is a picture of us testing one of the original I/O cards that we produced.
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.