Roeland54
Roeland54-
WiiMote Communication
04/08/2014 at 18:21 • 0 commentsIt's been quiet around here, so I thought I'd give a quick update about what I was doing.
We decided that I should take care of the WiiMote part of the project. We're using WiiMotes and IR-leds to track the position of our quadcopter during flight.
I wanted to use the opensource library WiiMoteLib to talk with the WiiMotes, but it prooved to be a rather tricky job to get the WiiMotes connected using HID. So I kept looking for a different solution.
I found the solution in a commercial library (BOOH!) of which I was able to obtain a demo version (fully functional, yay!). This library allows us to talk to the WiiMotes directly over bluetooth or HID.
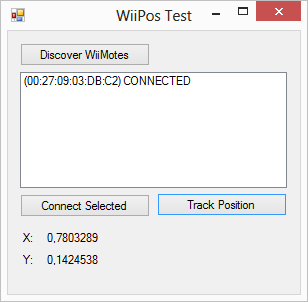
I have wrapped a little bit of my own code around the library and came up with my own little library which outputs the 2D position of a single WiiMote or the 3D position based on 3 or more WiiMotes.
Here's a screenshot of my testprogram which shows the 2D position of a single WiiMote:
![]() And ofcourse as with all great software, we have a bug I can't get rid of (so I won't).
And ofcourse as with all great software, we have a bug I can't get rid of (so I won't).![]()
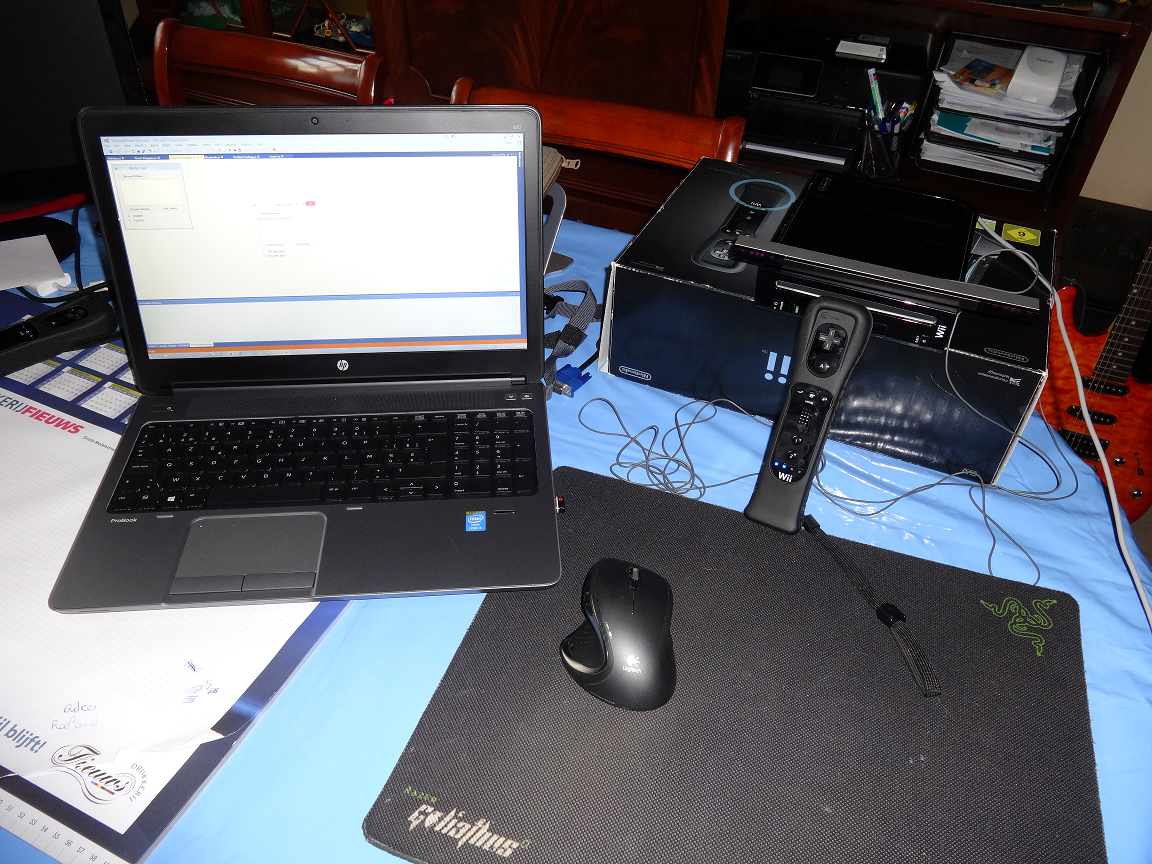
Here's what my test setup looked like:
![]()
-
Getting our resources
04/04/2014 at 11:16 • 0 commentsOk we needed resources for doing position tracking.
A quadcopter with iR-LEDs could be tracked with WIIMotes, so we went to our friends and got them.
But then human tracking, well the best device we could think off was the Kinect Sensor. The Problem was, we didn't knew anyone with a KinectLuckily on twitter and facebook people got us in contact Microsoft Inovation Center "Vlaanderen". And today we got the message we could use a Kinect sensor... ONE. Yip the brand new one.
I hope we are going to be able to show you guys stuff really soon.
-
first step
03/28/2014 at 20:57 • 0 commentsStep 1: Make it possible to control the quadcopter by software that we can adjust. We did this bij using the FirmataRC protocol from Richard Prinz.
Star Wars training droid
Flying training droid that interacts with its opponent.
 And ofcourse as with all great software, we have a bug I can't get rid of (so I won't).
And ofcourse as with all great software, we have a bug I can't get rid of (so I won't).