The Lightning Stalker
The Lightning Stalker-
CO2 vs Diode
08/01/2015 at 18:30 • 0 commentsDiode lasers have much higher divergence and lower output than the CO2 lasers we usually see in cutting machines. To compensate, we must mount the diode very close to the work. Luckily a laser diode is small enough that won't be a problem.
Why not use a CO2 laser then? CO2 lasers have problems of their own. They are bulky, require high voltage and a water cooling loop. Water and electricity are mixing very close together. They are also thin glass and very fragile. Many do not survive a trip through the mail system. Internal misalignment and power fade are also very common. So why are we still using them? It comes down to power density, absorption, and beam quality. CO2 is still the cheapest solution for laser metal cutting.
But for a hobbyist interested in etching and light cutting of thin materials (not metals unless very thin), diode lasers still have an advantage.
-
PIC10F200 Code
08/01/2015 at 17:32 • 0 comments;******************************************************************************* ; * ; Filename: Laser_Pantograph.asm * ; Date: 8/5/2014 * ; File Version: 1.0 * ; Author: The Lightning Stalker * ; Company: Lightning Industries * ; Description: Implements countdown timer and remote switch for * ; facilitation of compliance with FDA regs. * ; * ;******************************************************************************* ; * ; Revision History: * ; * ;******************************************************************************* #define SWITCH GPIO,GP3 ; Remote switch #define COMP GPIO,GP2 ; Comparator output #define PS_ON shadow,GP0 ; ATX PS_ON #define PS_ON_MASK b'00000001' ; Bitmask for PS_ON (GP2) #define BEEP shadow,GP1 ; Have a buzzer for some output. #define BEEP_MASK b'00000010' ; Bitmask to toggle the buzzer #define DoIBeep Beep,0 ; boolean beeping toggle ;******************************************************************************* ; Processor Inclusion ;******************************************************************************* #include "p10f200.inc" #include "Debounce.inc" ; CONFIG ; __config 0xFFEB __CONFIG _WDTE_OFF & _CP_OFF & _MCLRE_OFF ;******************************************************************************* ; Variable Definitions ;******************************************************************************* GPR_VAR UDATA TimerL RES 1 TimerH RES 1 TimerE RES 1 TimerW RES 1 Beep RES 1 shadow RES 1 ;******************************************************************************* ; Reset Vector ;******************************************************************************* RES_VECT CODE 0x0000 ; processor reset vector GOTO START ; go to beginning of program ;******************************************************************************* ; MAIN PROGRAM ;******************************************************************************* MAIN_PROG CODE ; let linker place main program START Reset movwf OSCCAL ; load oscillator calibration value bcf OSCCAL,FOSC4 ; disable FOSC/4 output on pin 3 movlw b'10011111' ; put Timer0 in timer mode, set pin 3 as GP2 option ; and enable weak pull-ups Init movlw PS_ON_MASK ; Clear all output (latch) movwf GPIO ; except for GP0, which is inverted PS_ON movwf shadow ; and output register shadow movlw 0xff ; Set GP2 & 3 as input, GP0 & 1 as output xorlw PS_ON_MASK xorlw BEEP_MASK tris GPIO ; Load TRIS ;goto Main ;***************REMOVE*********REMOVE**********REMOVE!!!!! ;Sound alarm, light LED, and begin 25 second countdown. movlw BEEP_MASK xorlw PS_ON_MASK ; remember, PS_ON HAS TO stay high! movwf shadow movwf GPIO movlw .6 ; Sound alarm for one second movwf TimerE movlw .19 movwf TimerH movlw .173 movwf TimerL Delay1s decfsz TimerL,f goto Delay1s decfsz TimerH,f goto Delay1s decfsz TimerE,f goto Delay1s movlw PS_ON_MASK movwf shadow ; Everything off movwf GPIO movlw .122 ; Delay another 24 seconds movwf TimerE movlw .193 movwf TimerH movlw .129 movwf TimerL Delay24s decfsz TimerL,f goto Delay24s decfsz TimerH,f goto Delay24s decfsz TimerE,f goto Delay24s goto $+1 Main ;Wait for remote signal btfsc SWITCH ; someone pressing the switch? goto $ + 5 ; keep going call SwitchDebounce ; Debounce it then! xorlw 1 ; Did it btfss STATUS,Z ; bounce? goto SwitchPressed ; nope.avi goto Main SwitchPressed clrf shadow ; Bring laser online clrf GPIO LaserON btfss SWITCH ; Switch still on? goto LaserON ; Yes movlw PS_ON_MASK ; No movwf shadow ; Shut the laser off movwf GPIO goto Main END ; Directive 'end of program'Debounce.inc -
;****************************************************************************** ;SwitchDebounce - Waits for switch to release and settle ;****************************************************************************** ; The SWITCH must be a steady high for 10 milliseconds to be considered ; released and debounced. The debounce routine sets a 10 mSec timer and looks ; for a high SWITCH input. The timer is reset to 10 mSec for every occurance of ; a low SWITCH input. ; ; Debounce timer constants (TenMSH and TenMSL) are a function of the ; instruction execution time and number of instructions in each loop. Debounce ; time for this example is: ; Timer overhead + TenMSH * [outer loop time + (TenMSL * inner loop time)] ; or [2 + TenMSH * (5 + (TenMSL * 5))]*(4/fosc)= .010 ; ; Arbitrarily choosing 99 for TenMSL we solve for TenMSH ; 2 + TenMSH * (5 + (99 * 5)) = 10,000 ; TenMSH = 9998/500 ~ 20 #define TenMSH .20 #define TenMSL .99 DEBOUNCE_VAR UDATA CountH RES 1 ; debounce counter MS byte CountL RES 1 ; debounce counter LS byte DEBOUNCE CODE SwitchDebounce movlw TenMSH ; set outer timer loop count movwf CountH ; outer loop overhead is 2 instructions ;========== outer loop [TenMSH * 5 instruction cycles*(Inner loop time)] ====== SDA10 movlw TenMSL ; set inner timer loop movwf CountL ;----------------- inner loop (TenMSL * 5 instruction cycles) ----------------- SDA20 btfsc SWITCH ; test SWITCH input retlw 1 ; SWITCH was high - return nonzero status decfsz CountL,f ; inner loop countdown goto SDA20 ; test SWITCH while counting ;-------------------------------- inner loop ---------------------------------- decfsz CountH,f ; outer loop countdown goto SDA10 ; reset inner loop after each outer loop count ;================================ outer loop ================================== retlw 0 ; full countdown and no bounces achieved - exit -
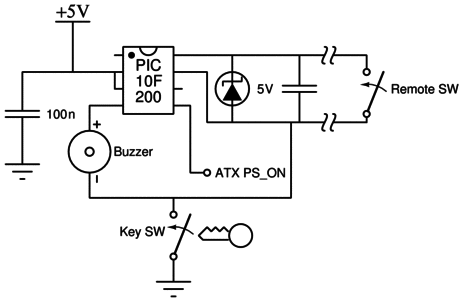
Controller Schematic
08/01/2015 at 17:25 • 0 comments![]()
-
Code, diagrams
08/01/2015 at 17:21 • 0 commentsPosting some code and digigrams