RoGeorge
RoGeorge-
Delta-Sigma vs PWM: Waveforms
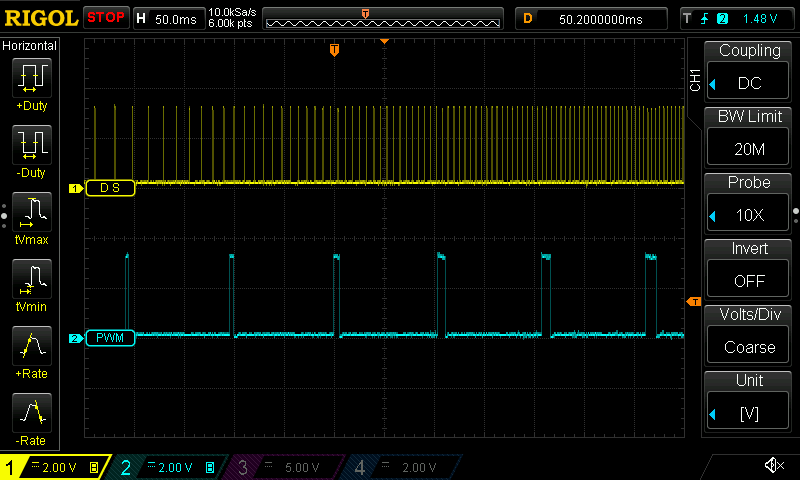
06/28/2015 at 00:22 • 1 commentThe yellow channel is Delta-Sigma, blue channel is PWM.
While PWM keeps it's frequency constant when increasing the duty cycle, Delta-Sigma increase the number of it's pulses and keeps the wide of each pulse constant.This is how Delta-Sigma is avoiding flickering much better then PWM, but with the same computational effort.
![]()
Next is an animated picture at different duty factors, for the same computational effort.
At 50% duty cycle, Delta-Sigma have a maximum refresh rate of 1250 Hz, while PWM have only 10 Hz.![]()
3D Printing AVR Arduino Art Audio Automation BeagleBone Bluetooth Cameras Clock Drones Environment Hardware IoT LED Medical Music Radio Raspberry Pi Remote Control Robotics Rockets Satellites Science Security Software Virtual Reality Wearables
-
GitHub sources added for CCS 6.1.0
06/24/2015 at 07:57 • 0 commentsGitHub repository with all the sources for CCS 6.1.0: https://github.com/RoGeorge/Delta-Sigma_versus_PWM
3D Printing AVR Arduino Art Audio Automation BeagleBone Bluetooth Cameras Clock Drones Environment Hardware IoT LED Medical Music Radio Raspberry Pi Remote Control Robotics Rockets Satellites Science Security Software Virtual Reality Wearables
-
PWM, DAC, MCU, RGB, RG, LED, MSP, WDT?
06/18/2015 at 19:03 • 0 commentsPWM = Pulse-Width Modulation
DAC = Digital-to-Analog ConverterA PWM followed by an integrator is turning into a DAC, in order to control the intensity and the color of the LEDs.
MCU = MicroController Unit
RGB = Red, Green, Blue
RG = Red, Green
LED = Light-Emitting Diode
MSP = Mixed Signal Processor
WDT = WatchDog Timer
GCC = GNU Compiler Collection
GNU = GNU is a recursive acronym for "GNU's Not Unix!" (Wikipedia)
CCS = Code Composer Studio (an IDE tool from TI)
IDE = Integrated Development Environment
TI = Texas Instruments3D Printing AVR Arduino Art Audio Automation BeagleBone Bluetooth Cameras Clock Drones Environment Hardware IoT LED Medical Music Radio Raspberry Pi Remote Control Robotics Rockets Satellites Science Security Software Virtual Reality Wearables
-
Why MSP430?
06/18/2015 at 18:53 • 0 commentsIt just happened to have one MSP430G2211 lying around. It came together with a Texas Instruments MSP430 LaunchPad, as a spare second microcontroller.
3D Printing AVR Arduino Art Audio Automation BeagleBone Bluetooth Cameras Clock Drones Environment Hardware IoT LED Medical Music Radio Raspberry Pi Remote Control Robotics Rockets Satellites Science Security Software Virtual Reality Wearables
-
Why not PWM?
06/18/2015 at 18:49 • 0 commentsBecause in PWM, for each PWM period, there is only one big pulse, wider or thinner according with the duty cycle.
On the countrary, in Delta-Sigma there are many thinner pulses corresponding to the same PWM period, and spatially spread over the whole period. The bigger the duty cycle, the bigger the number of the thinner pulses per each period.
3D Printing AVR Arduino Art Audio Automation BeagleBone Bluetooth Cameras Clock Drones Environment Hardware IoT LED Medical Music Radio Raspberry Pi Remote Control Robotics Rockets Satellites Science Security Software Virtual Reality Wearables
Delta-Sigma versus PWM
Delta-Sigma: solution for a virtually unlimited number of DACs, and with faster refresh rates than PWM. Applicable on any microcontroller.