Bill Weiler
Bill Weiler-
Ordered T4 solderpaste instead of T3
04/17/2018 at 05:10 • 0 commentsThe rule of thumb is to span the stencil aperture by 5 solderballs. My analog switch has a 0.2mm stencil width for the pins (it is a 10-pin QFN). T3 solderpaste largest ball is 0.045mm, so that is less then 5 balls across. T4 is 0.038mm, that fits okay.
It costs 2 bucks more for each 5cc syringe I use, a normal and a low temp solderpaste. I get them from Chip-quik. The bottom line is whether it works for me or not. So we will have to see.
-
Yeep
04/16/2018 at 07:49 • 0 commentsJust made a $650+ order from Digikey for parts to make 20 Skoobot Beta kits to sell at MakerFaire.
-
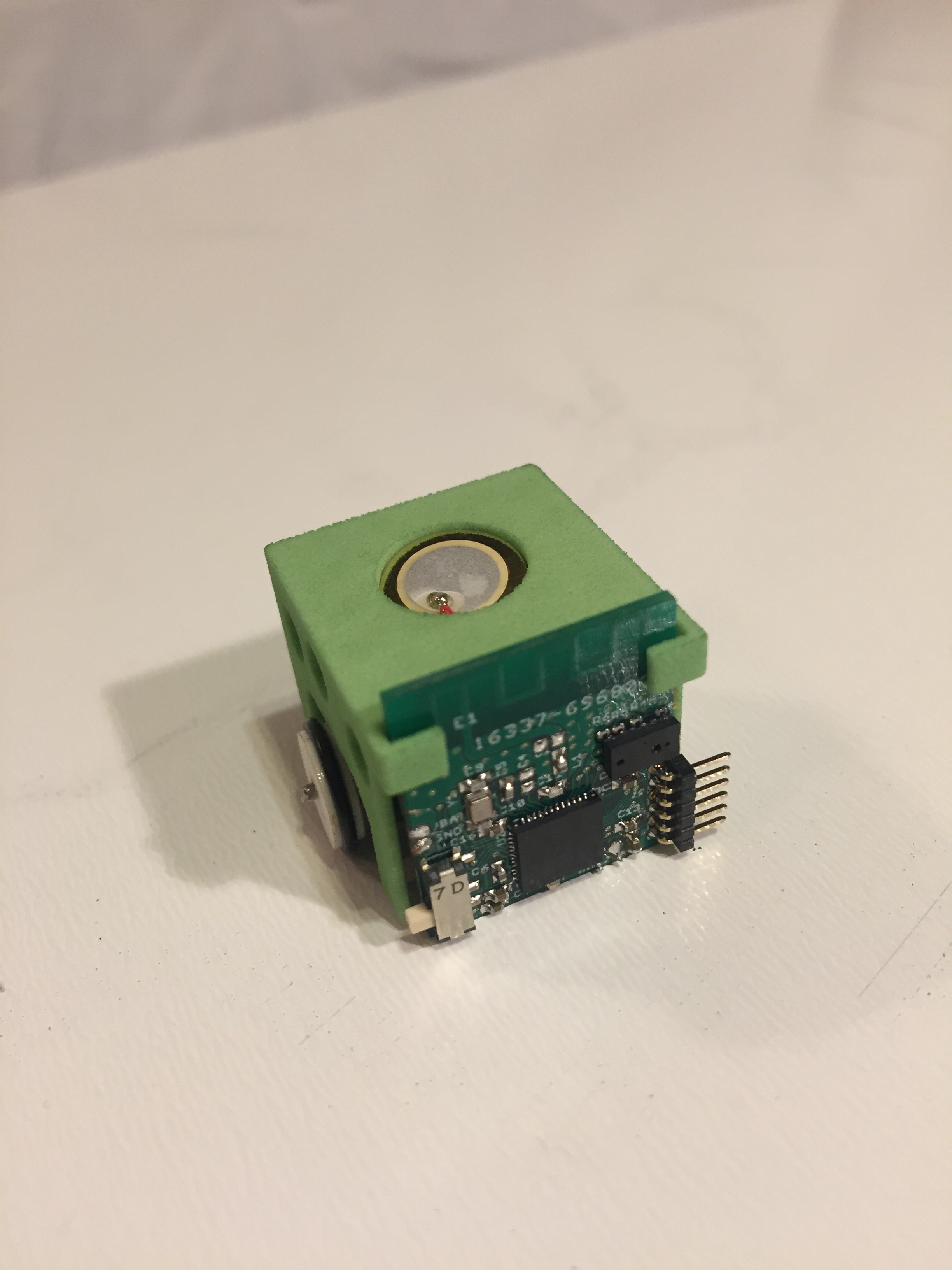
First version 3 assembled
04/13/2018 at 05:28 • 0 commentsIt's now the project page photo. I made the photos for Makerfaire advertising in Makershed, where I will be selling Beta kits. See the tiny parts above the distance sensor? those are hand placed 0201'a. (No, I am not a machochist, I wanted to push the envelope).
![]()
-
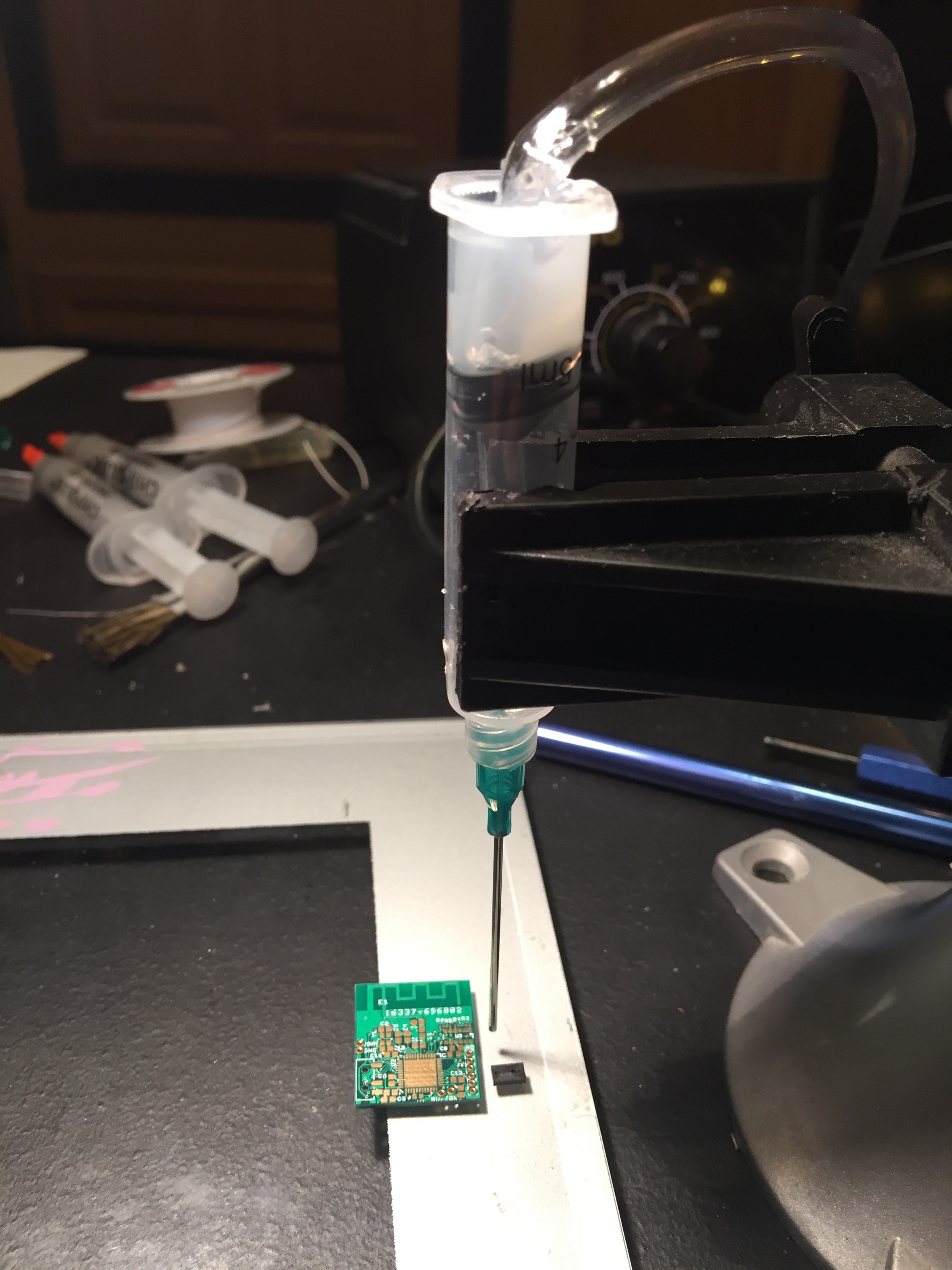
How to place IC's perfectly without jiggly suction tools
04/12/2018 at 06:58 • 0 commentsPro tip: Make a part placement suction device out of a syringe and a aquarium pump (reverse the valve). Put in a long tip, drill a pressure release hole and clamp it in a panavise. Adjust the height, tilt the panavise to pick up the part, and perfect placement! (disclaimer, I am not a pro).
![]()
-
Tiny Battery Woes
04/12/2018 at 06:57 • 0 commentsHey, lets shrink wrap one of the tabs on the tiny battery so when they try to get it off, it rips the tab off. (because they are haters, that's why)
![]()
-
Lastest Progress on v2, new video, better explanation of what it is for
04/03/2018 at 23:33 • 0 comments -
Working on firmware
04/01/2018 at 22:54 • 0 commentsI have been getting the BLE firmware fleshed out and I proved the mainboard v2 BLE is okay. I watched some youtube tutorial videos on Alibaba and read some articles. One thing that really popped out is a platform is difficult to market, and use cases are important. I kind of have been showing this robot as a platform to write code on, but I think I will have to package something useful so the buyer doesn't have to program.
If you think of use cases let me know. I can then do a survey and find out better what people would like. Here are some basic use cases, that might be fun, to start.
1. RC style driving with Android phone (start,stop,left,right,forward,reverse,slow,fast)
2. Capture the flag with RC driving, with 2 robots
3. Word recognition, robot dances when word is correct
4. Type a word into Android phone, send to robot, robot talks to second robot with word encoded in beeps, second robots sends the word (it thinks you sent) to your phone.
5. Sumo - using a sumo ring, battles another tiny robot
6. Draw trace in app on phone, point phone camera at robot, and by using feedback with cellphone camera, the robot follows your on screen trace.
-
Robot v2, first 1 assembled, and bugs to fix
03/28/2018 at 04:29 • 0 comments -
Some progress
03/26/2018 at 22:11 • 0 commentsI made a silly mistake and messed up the switch on the robot pcb. The rework makes the robot look bad, so this is no good for the Kickstarter, so I fixed it and will do a new pcb spin.
I have a shout out to PCB Pool, my board manufacturer, about a couple unrelated things before I spin the pcb again. One thing is they stamp (emboss) their name on the stencil. Then the raised letters screw up applying solderpaste, by preventing the stencil from laying flat. This seems 100% dumb, like what value do they get out of stamping the stencil? But it is industry standard practice and they likely never thought about it.
Also, I changed the 0201 led resistor package to 0402. I can't get this thing reworked when it fails because I can't get it exactly on the pads. The 0201's elsewhere seem okay. I also put a capacitor to close the the uC and it bumps into it, oops. So I fixed that.
I wanted the robot switch to control modes. I mean when it's on, the companion board automatically goes into J-Link mode, when it's off, it automatically goes into UART/Arduino mode. I verified the robot works, but the companion board has a bug and does not change modes, but I have an override. So, I will spin the companion board with a new idea.
Lastly, the nRF52832 Bluetooth Low Energy SDK implementation is a horrible hockey stick of learning. The reference designs are sooo easy, and the predefined BLE profiles are sooo nice. But when I tried to use the SDK on my custom board, with custom BLE, ooooh, forget it. I have to start from square one and read all their documentation. (aw man, they are so mean to me!)
-
UART working - here is video
03/26/2018 at 06:35 • 0 comments