I have two payloads:
PL-01: Measures C02, Humedity and temperature
PL-02: Measures the particles in the air (smog, dust and other solids in PMM).
You can Exchange the payload and the fly computer,
Already have an account? Log in.
To make the experience fit your profile, pick a username and tell us what interests you.
I have two payloads:
PL-01: Measures C02, Humedity and temperature
PL-02: Measures the particles in the air (smog, dust and other solids in PMM).
In this version the picosatellite allows you to exchange payloads without reprogramming the fly computer.
Step 1: PCB´s
This Pico-Satellite have 4 subsystems:
Each subsystem have their own PCB board, so we have two options:
The PDF makes files: Here
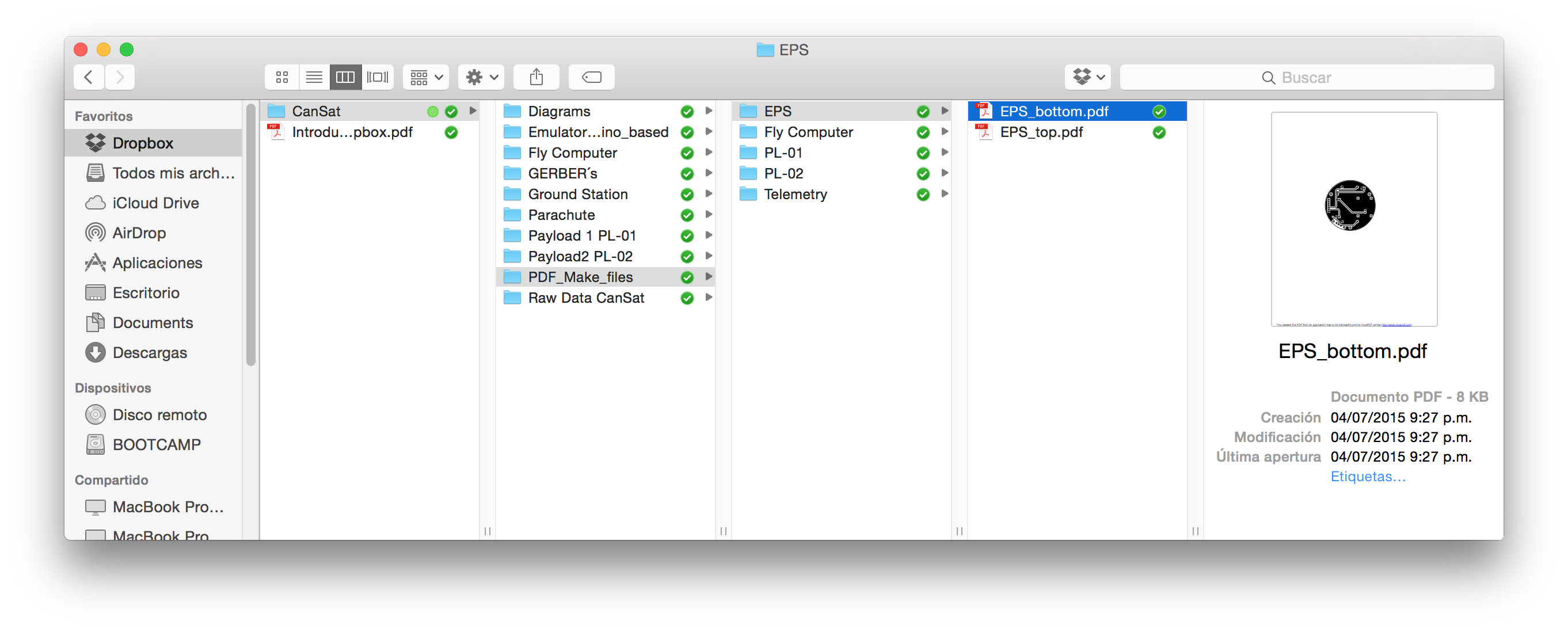
The gerber files: Here

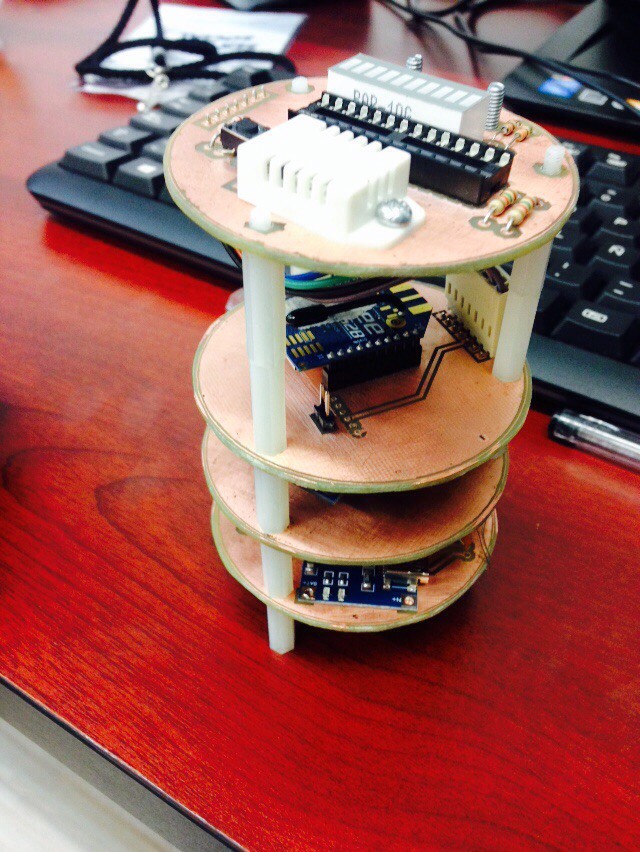
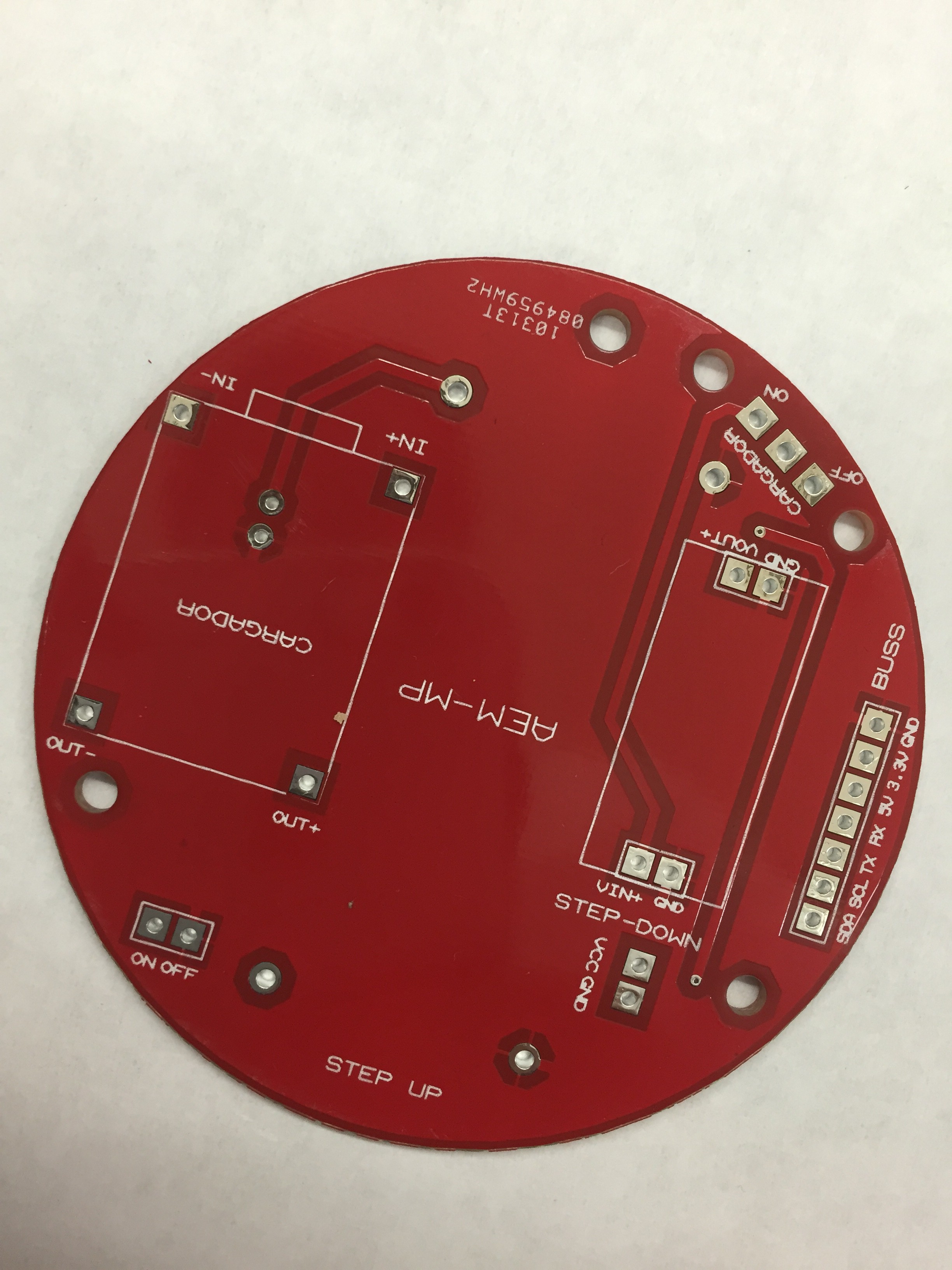
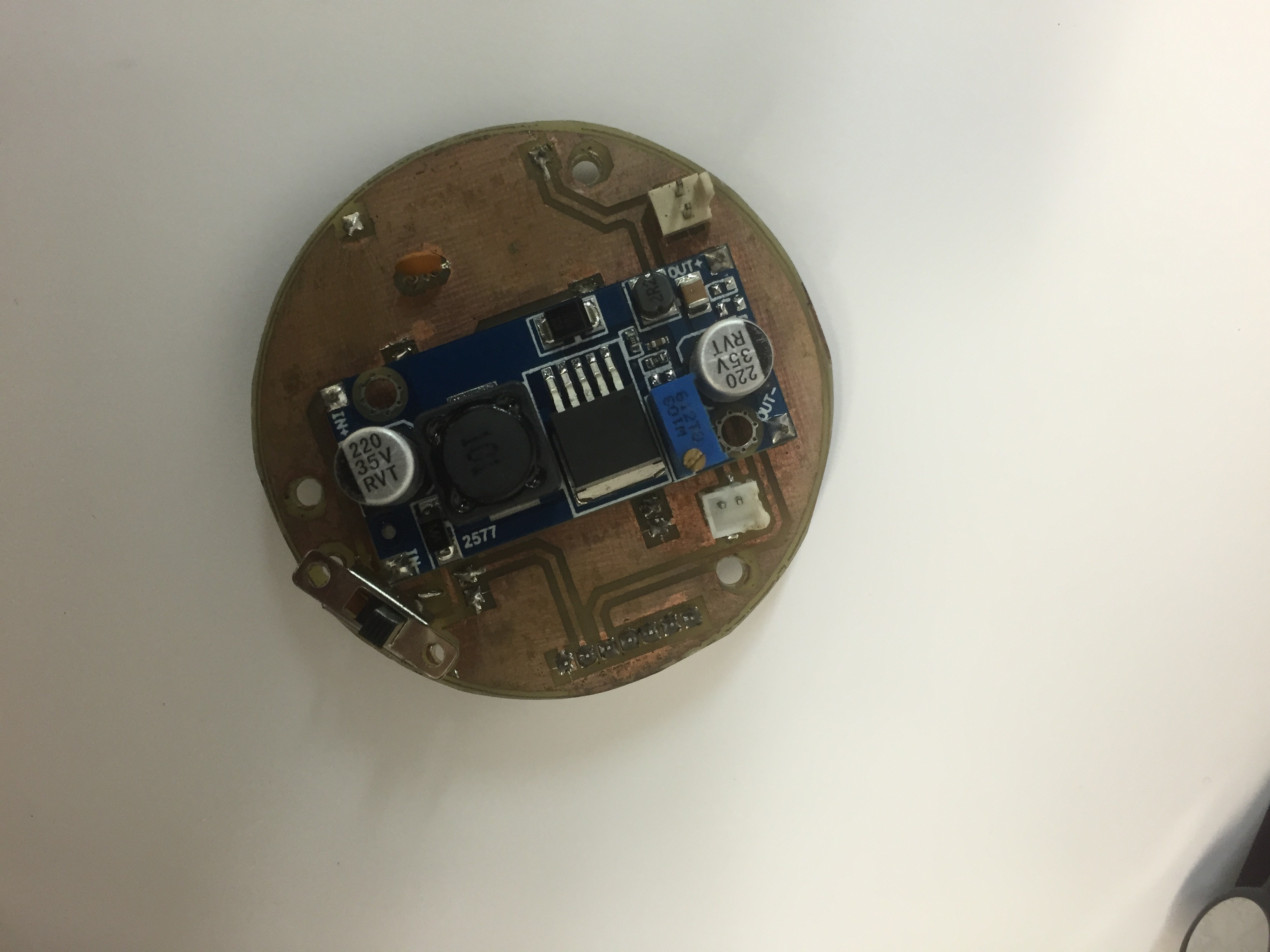
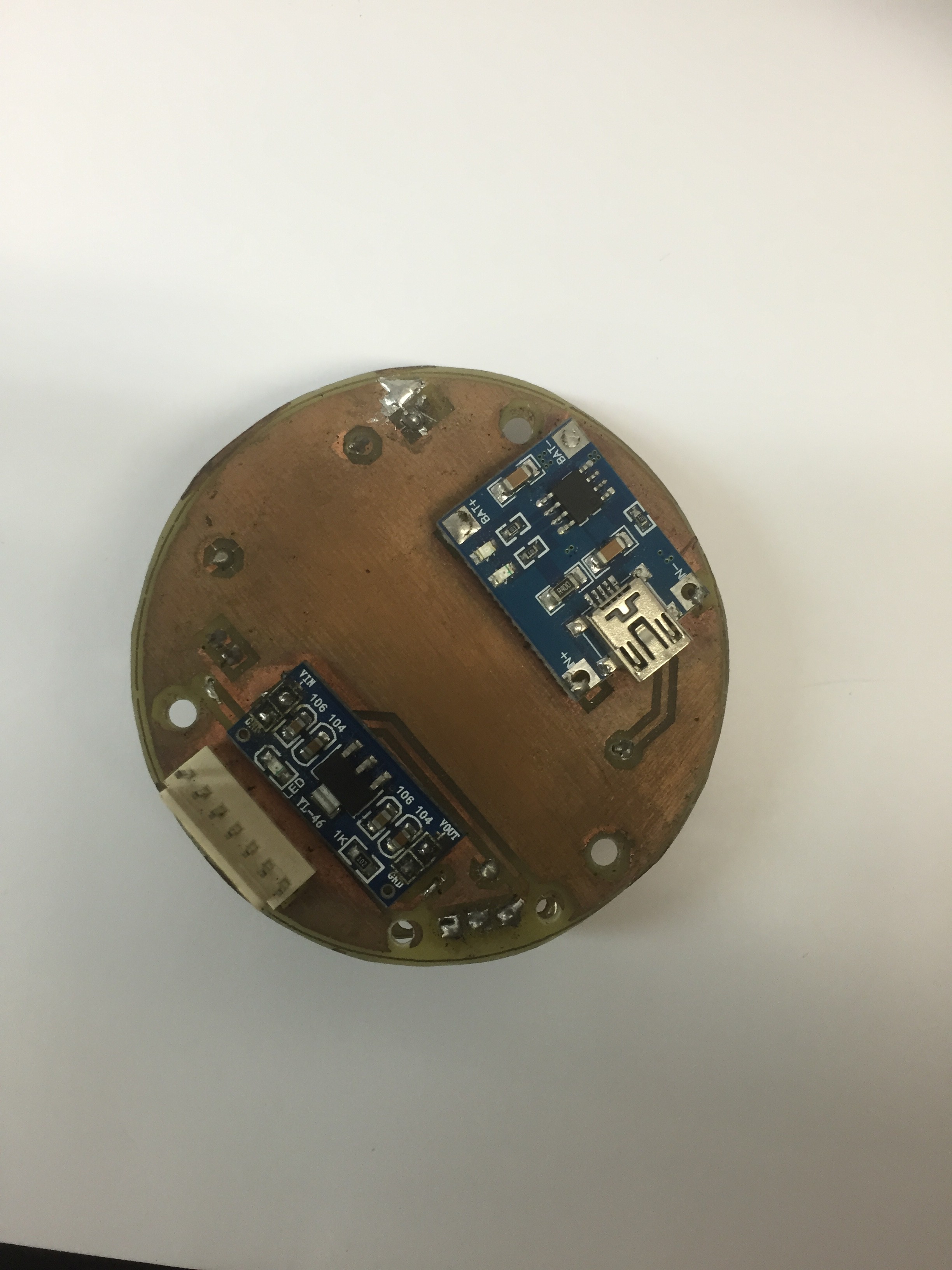
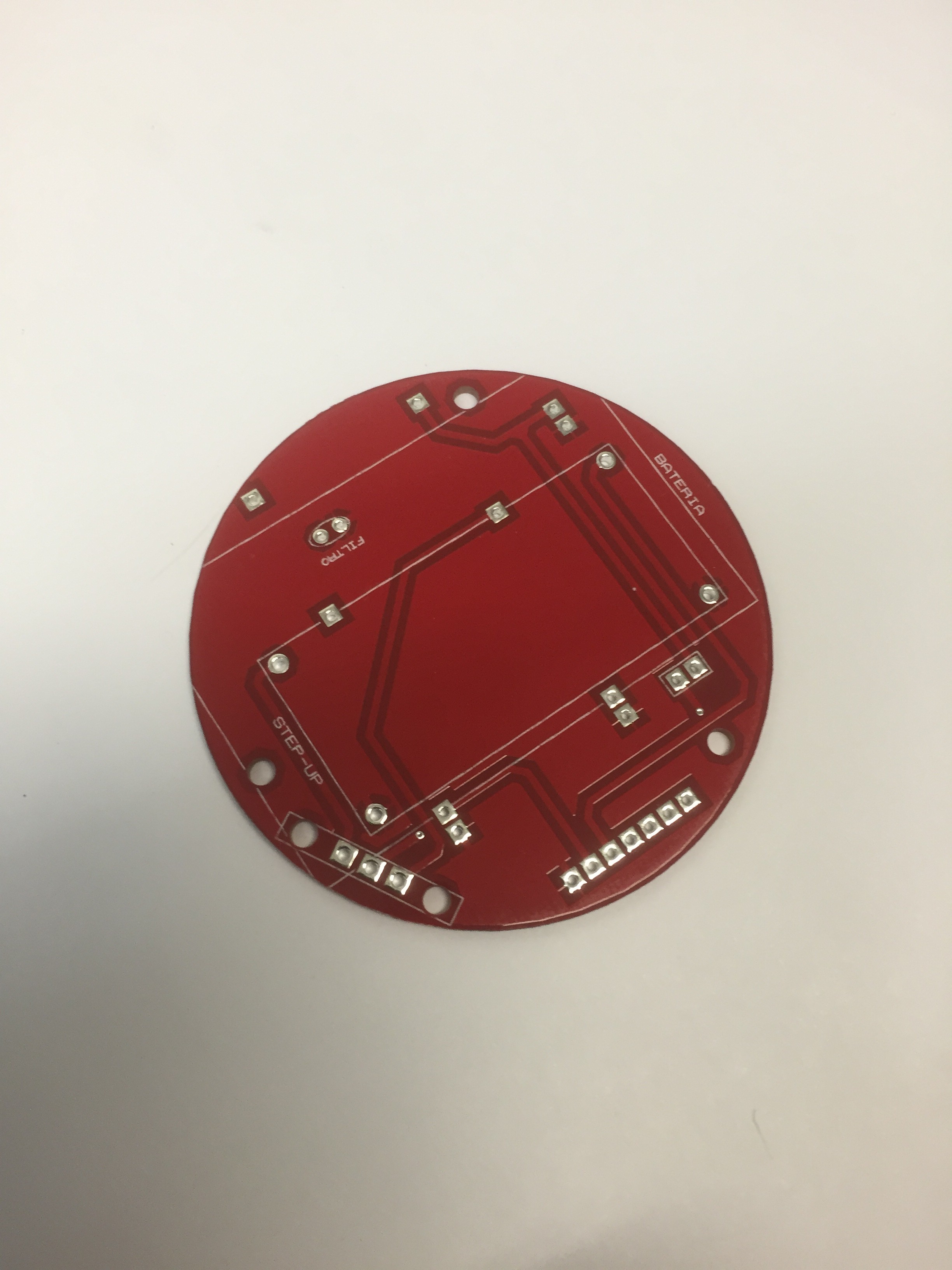
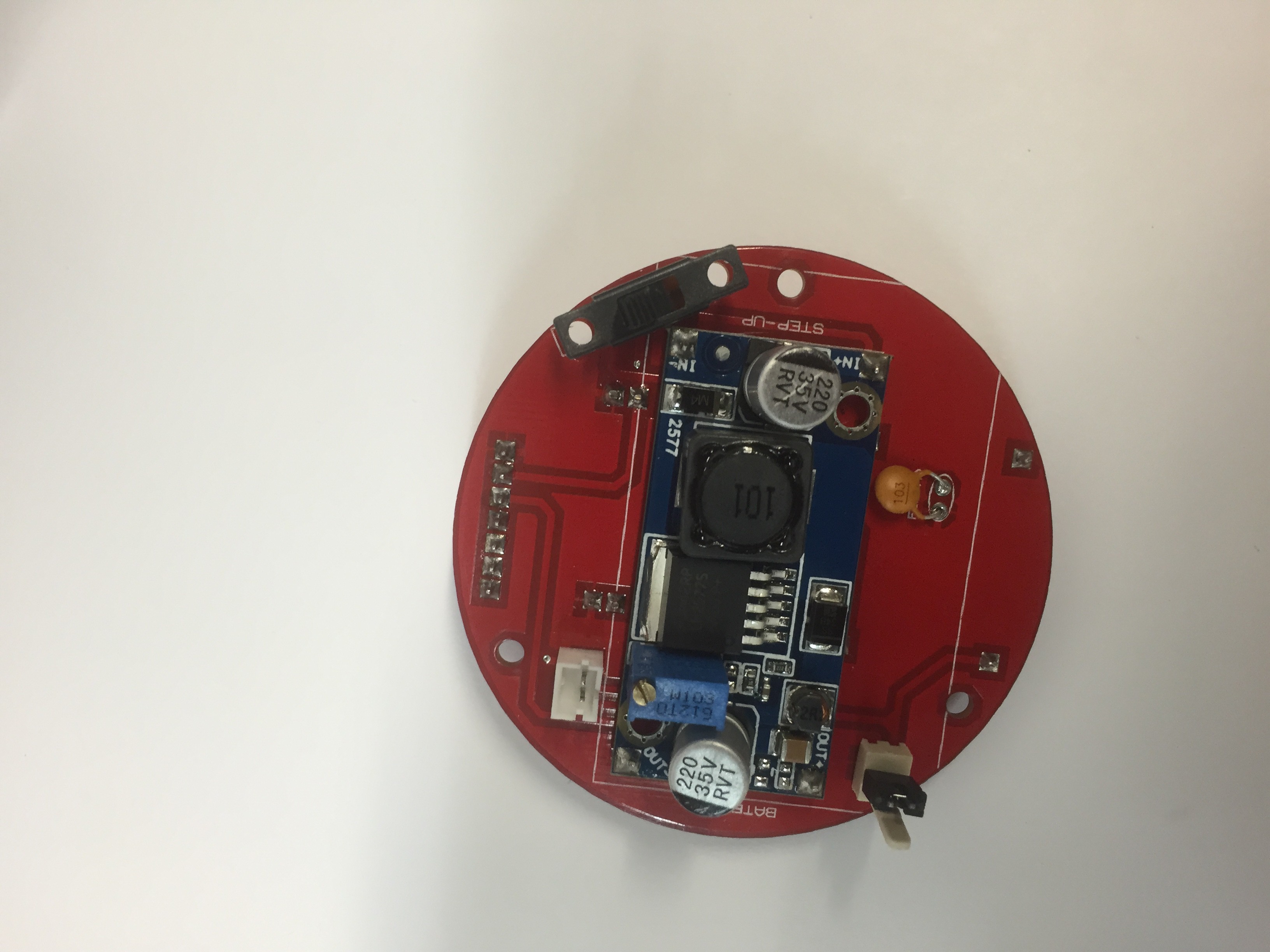
Step 2: EPS
Materials (click for image):
This is the view of the EPS welded.
The schematics are available: here
1.- PCB home made
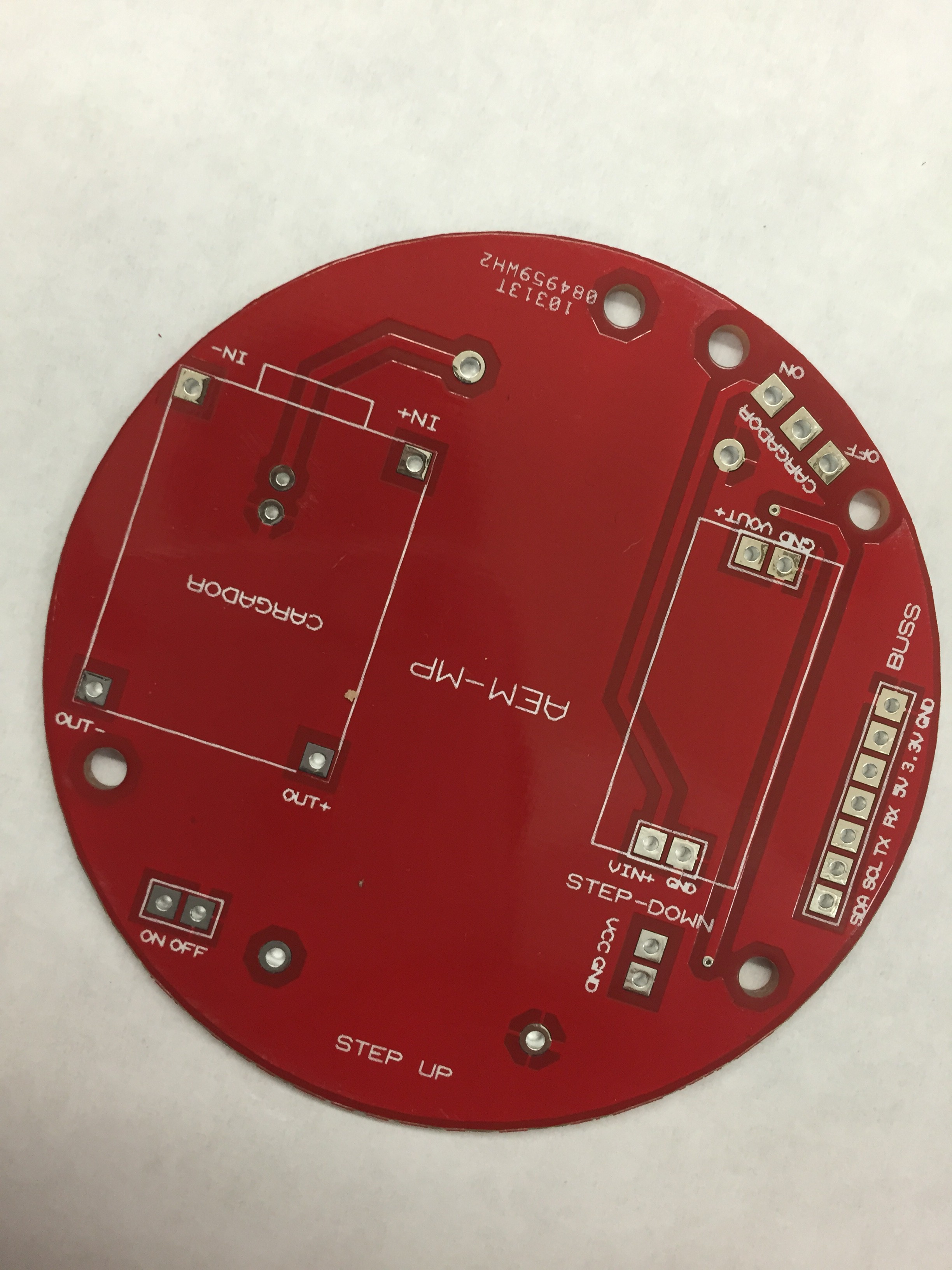
2.- PCB "pro"
Top View

Bottom
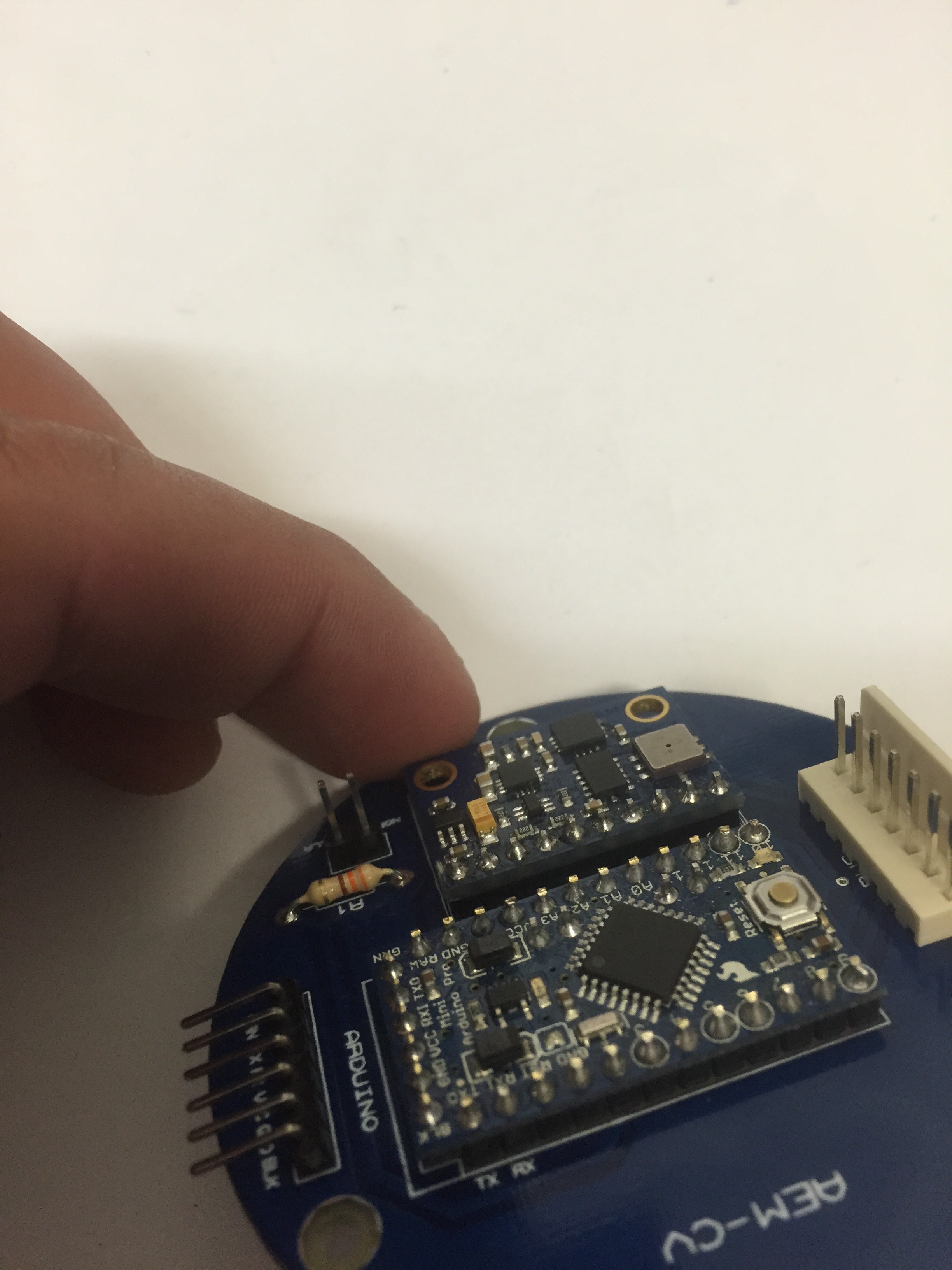
Its really important the orientation of each component, even the molex conector (BUSS). The conector of the baterry is JST.
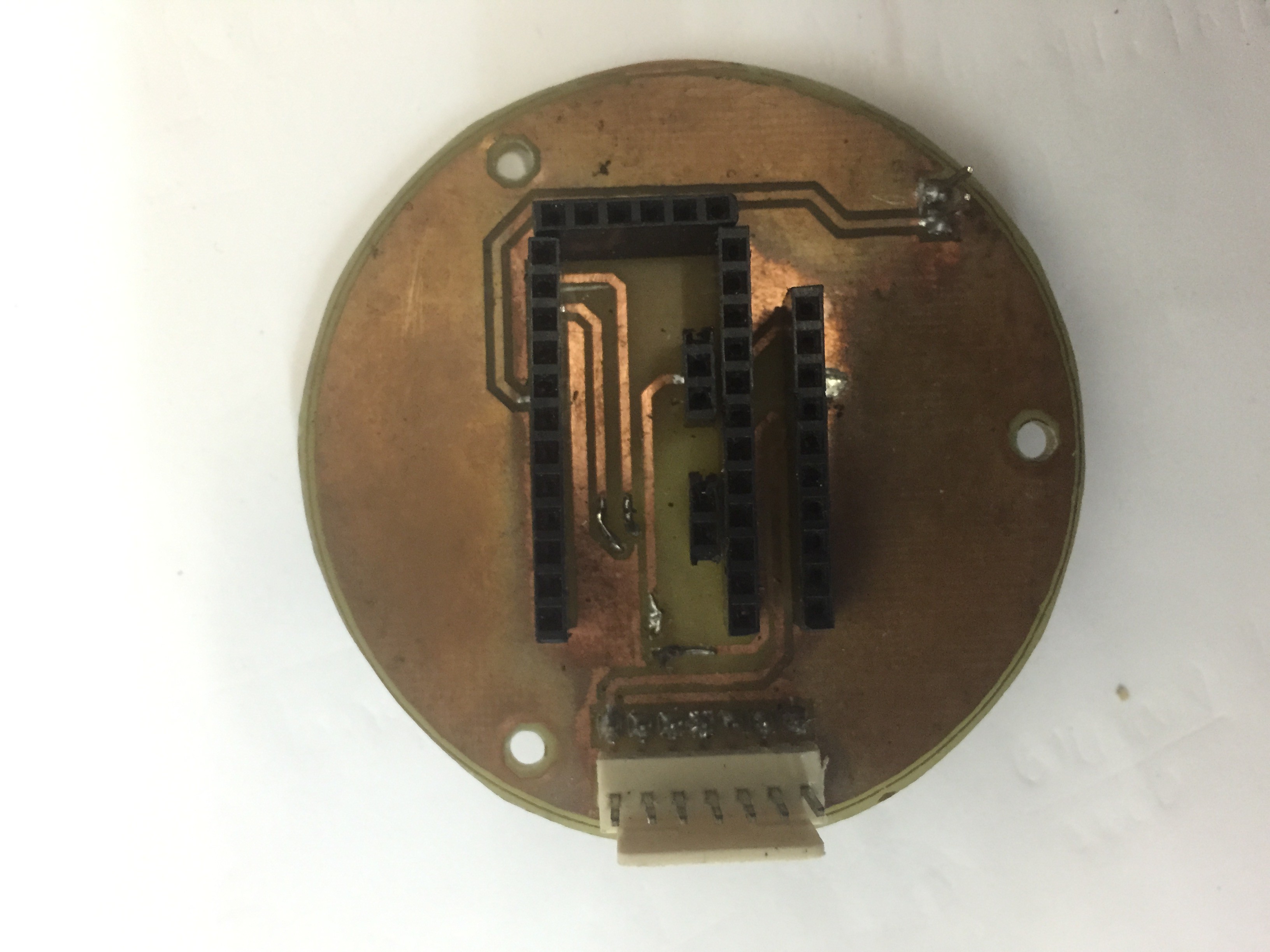
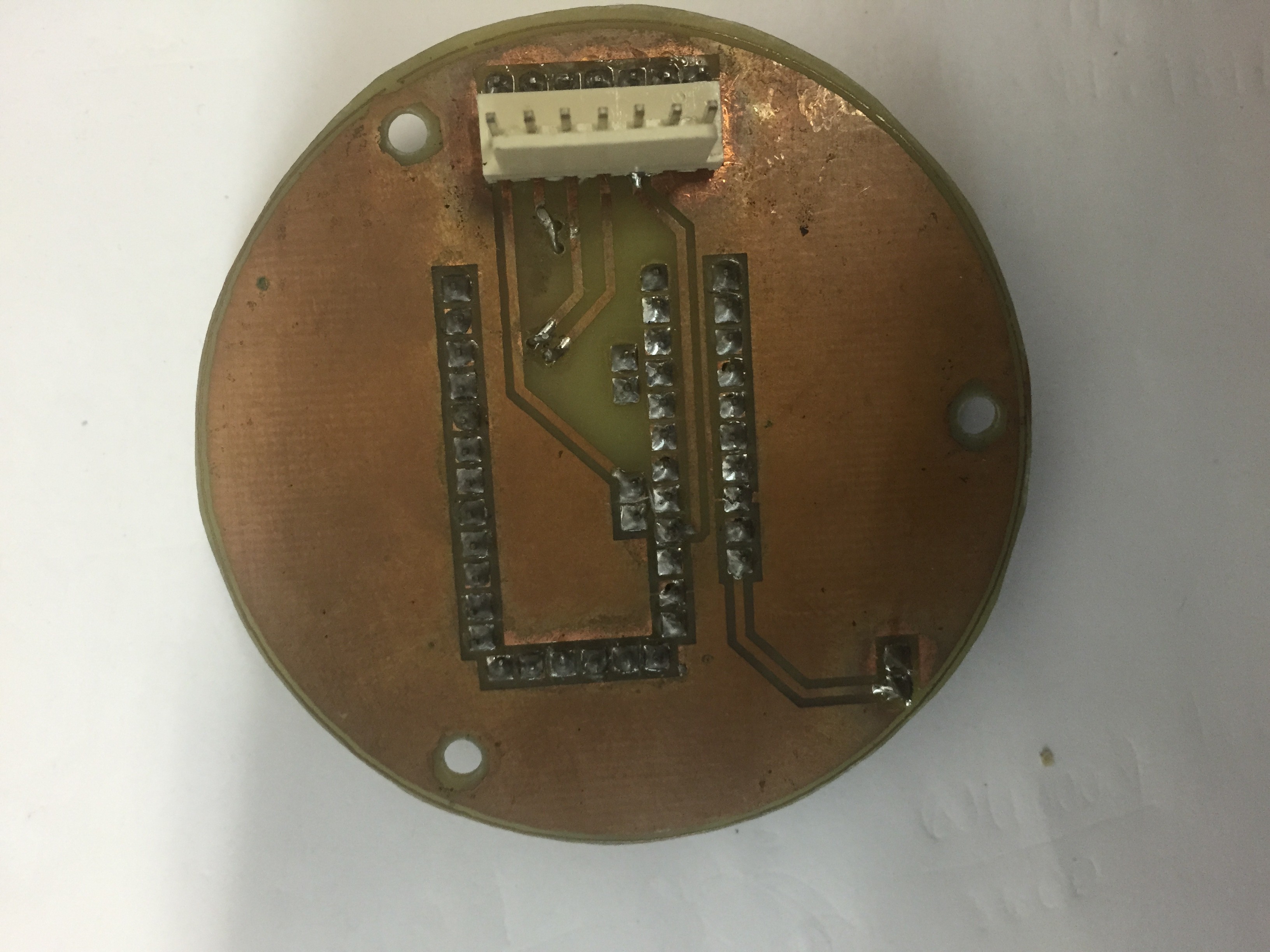
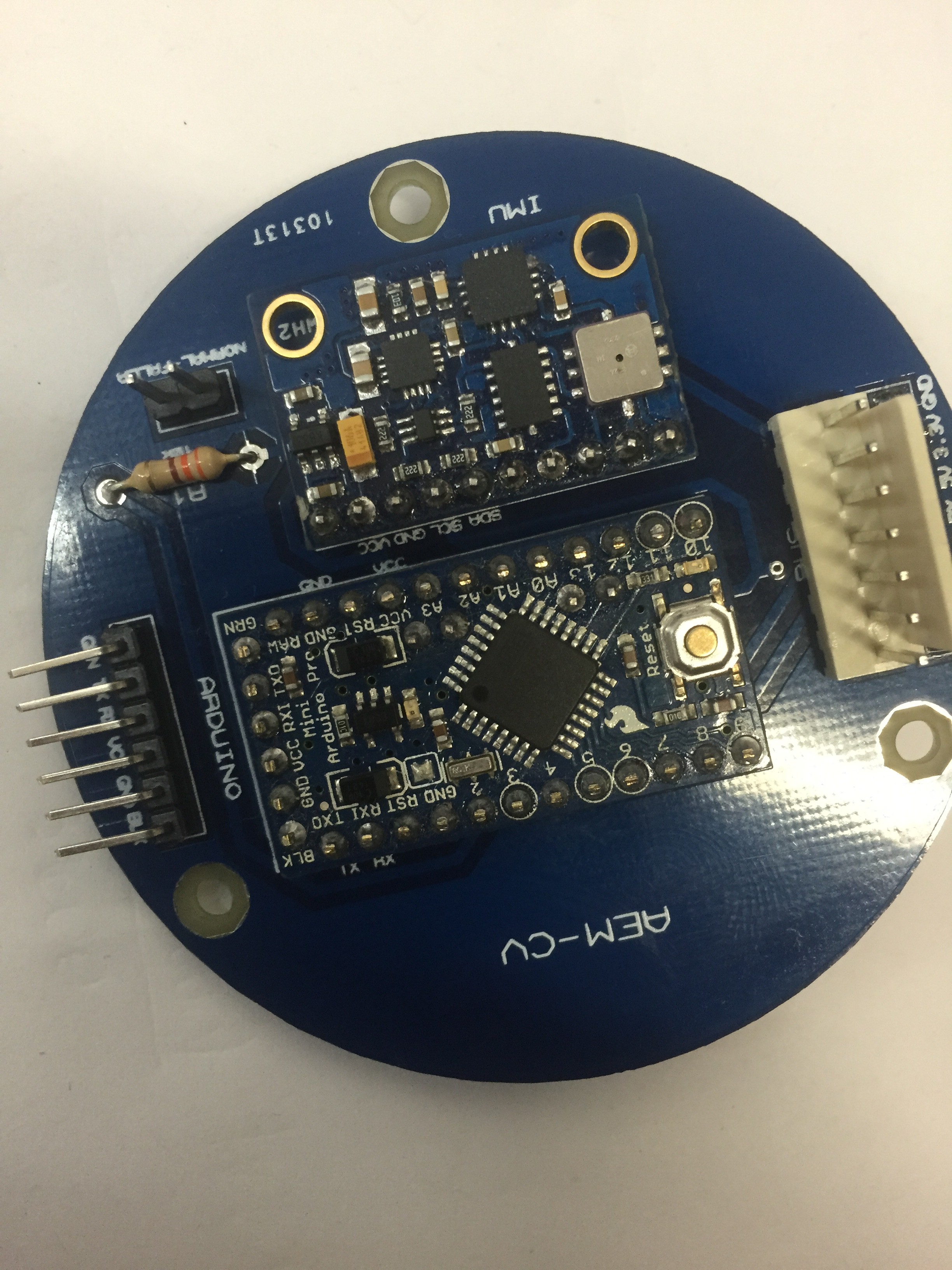
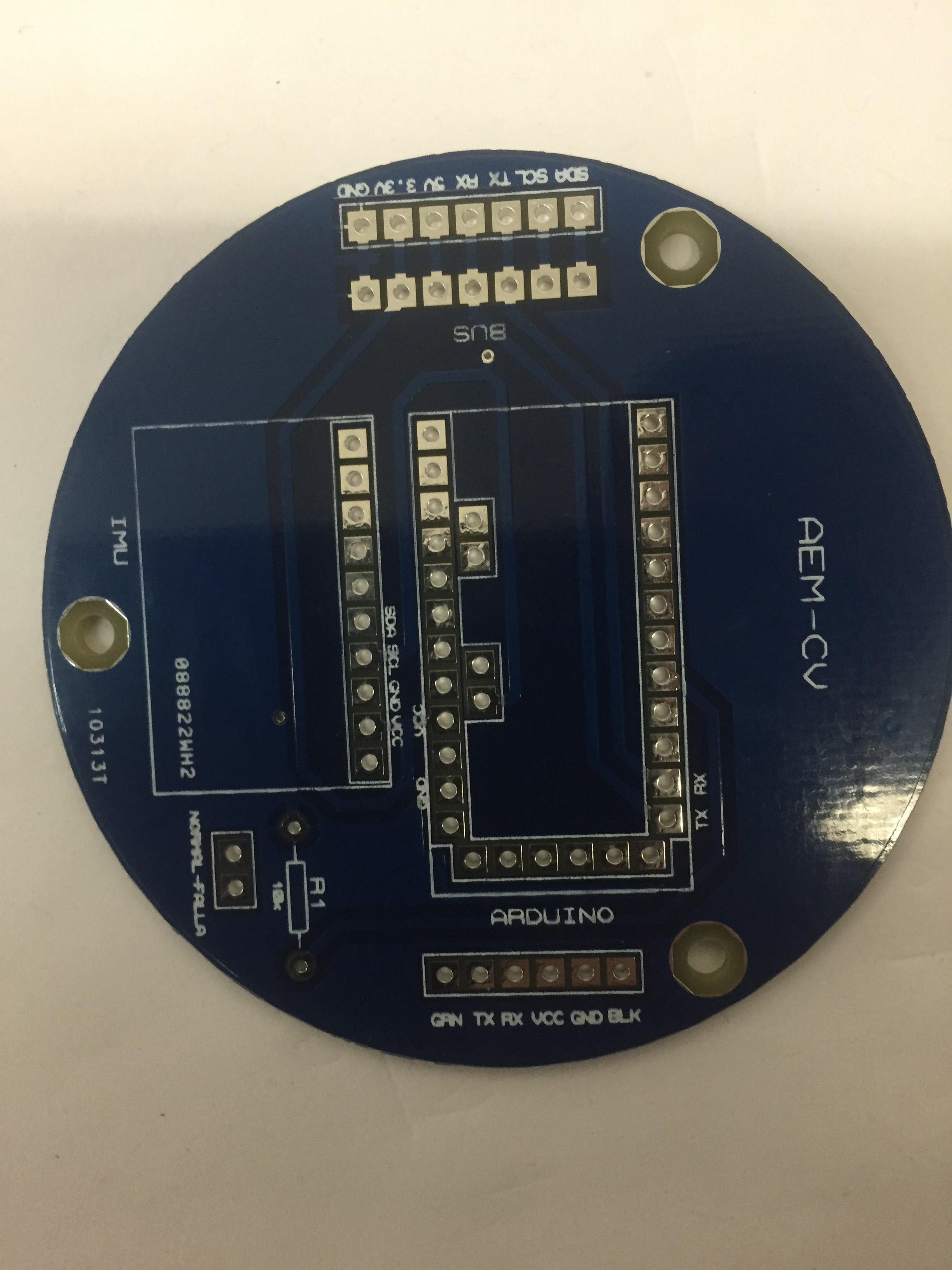
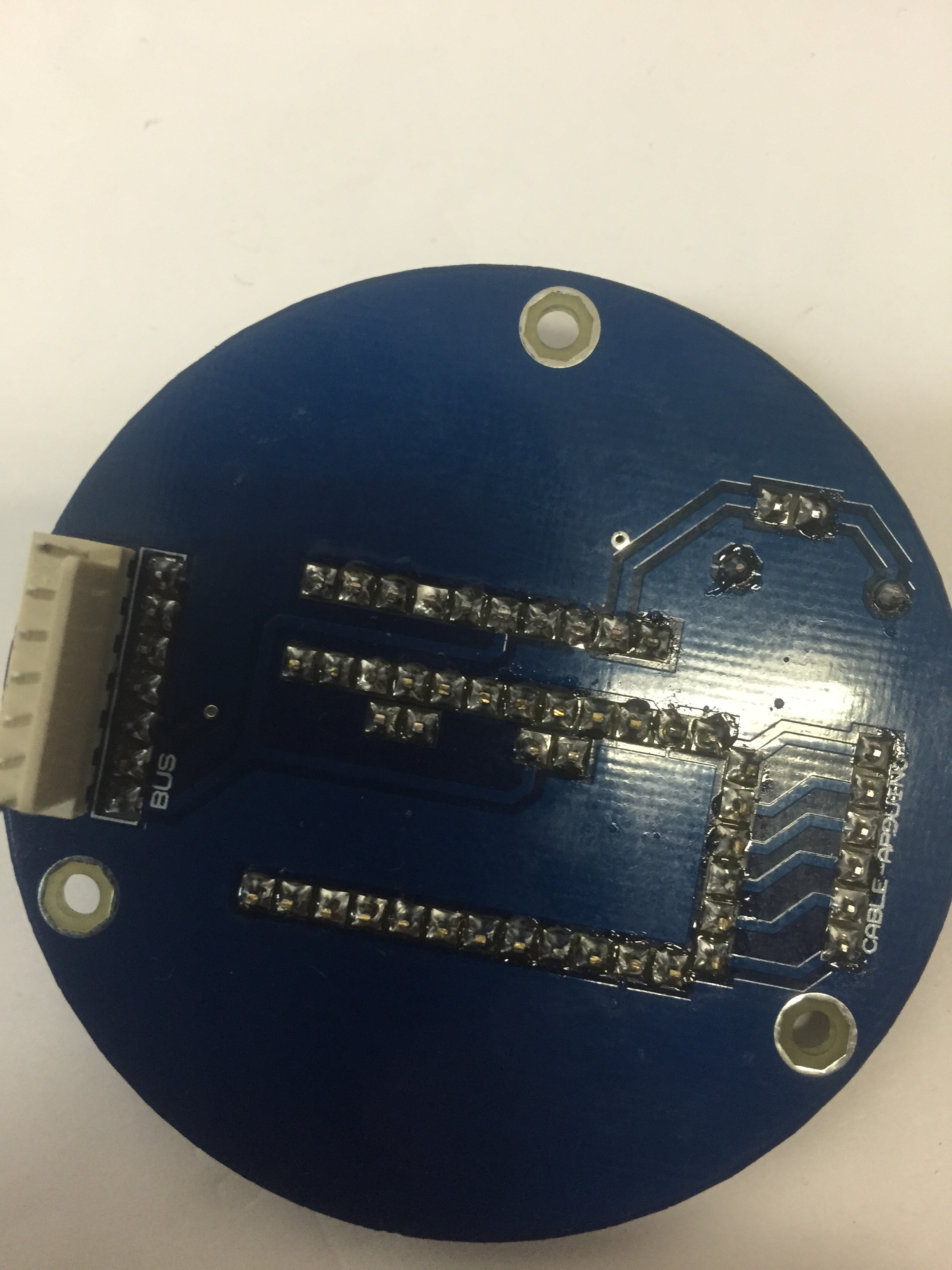
Step 3: C&DH (Fly Computer)
The C&DH subsystem have 2 variants:
1.- The Arduino pro Mini 3.3 8 Mhz Atmel328 based fly computer.
2.- The Intel Edison based fly computer.
The first one is finished and proved, work well but have a really low power of processing so, we cant use all the functions of the on board sensors,
The second one provide us a really powerful processor and access to all on board sensors functions, but i'm still working in the development on the required libraries. Also requires an advanced welding skills, because the components are SMT.
So here is the Arduino based fly computer. (Code & Schematics)
Materials(click for image):
The schematics are available: here
Top
Bottom
Top View
Bottom View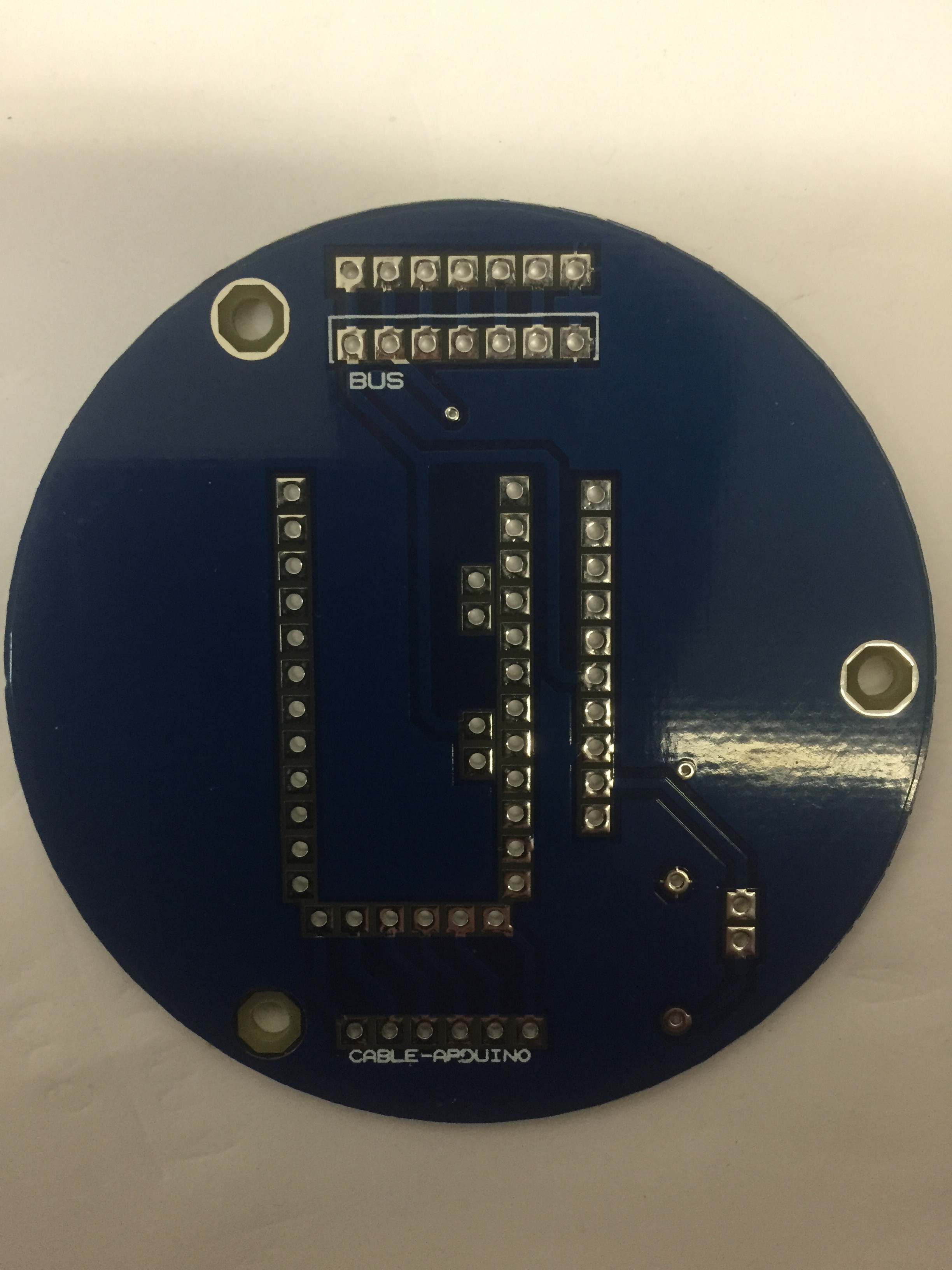
For test the C&DH subsystem, you can Scan I2C directions with this program using the FTDI cable connected as shown in this picture
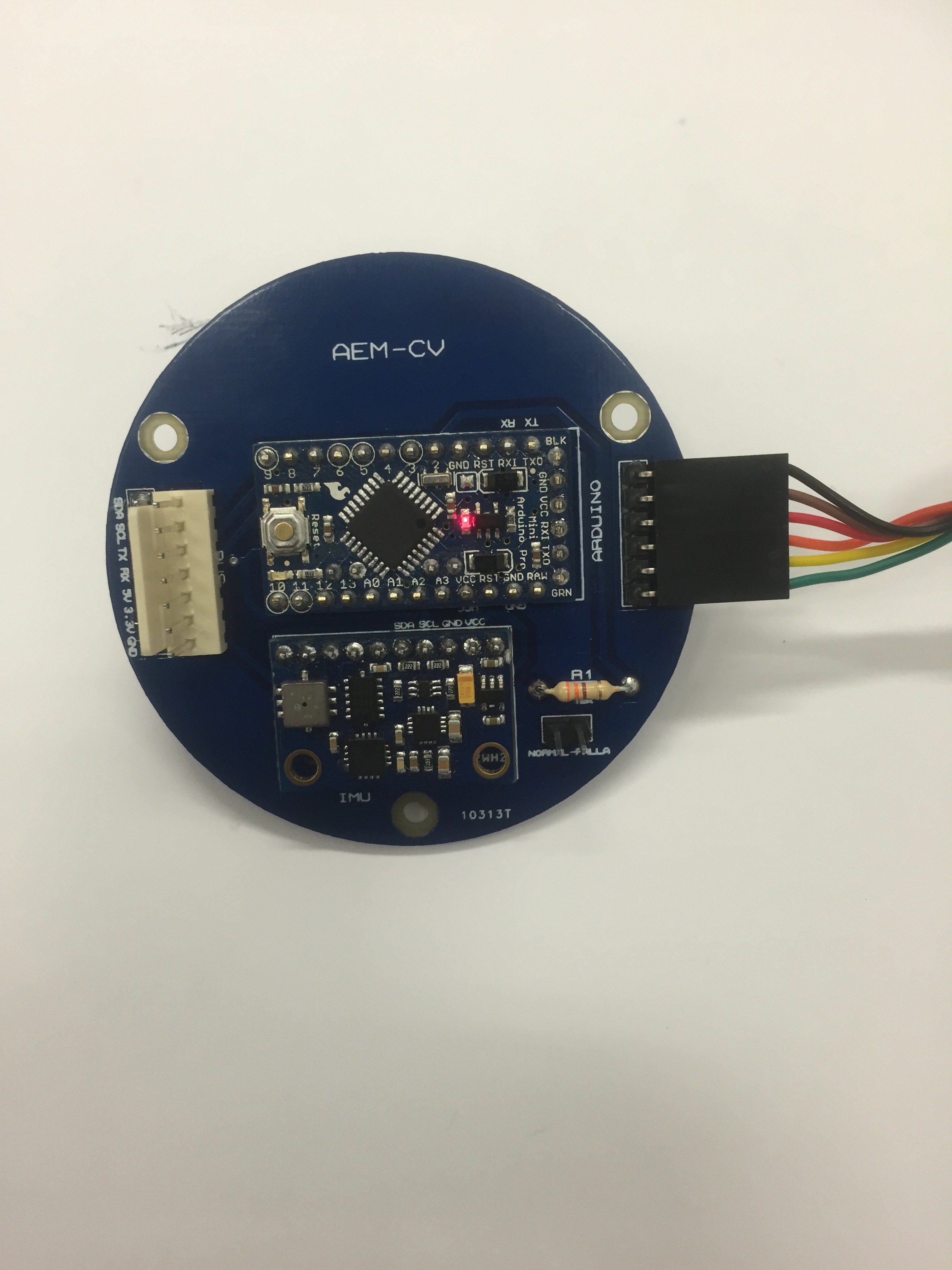
And the serial monitor of the Arduino IDE will show this:


 Ian Black
Ian Black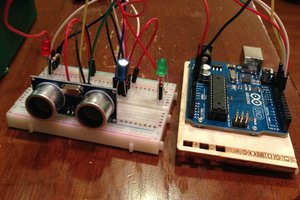
 Sean Roberts
Sean Roberts
 Lithium ION
Lithium ION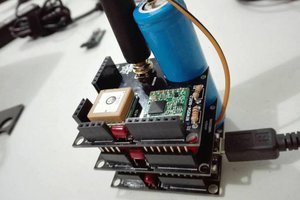
 Sabas
Sabas