 The Big One
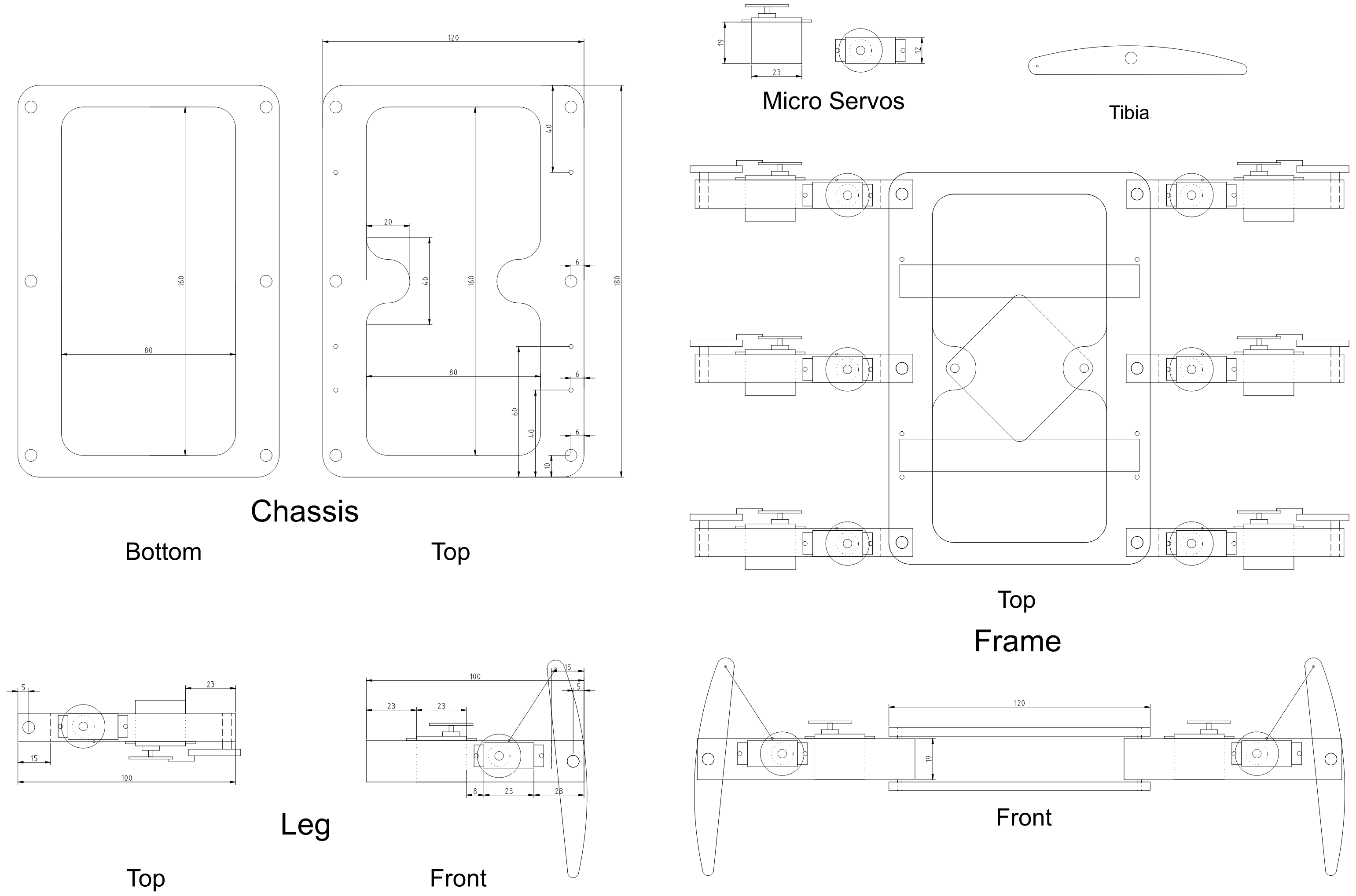
The Big OneAs I was working, I found some areas in which the updated design could be improved. The new schematic is below. Of note are the coxa joint axle holes are now closer to the edge (6mm instead of 10mm) and labeled, the push rod holes have been added to the top of the chassis, and the tibia shape has been updated to reflect the newest design.
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.